

лабы по оптике
.pdfпрямой, то сопряженная с ней точка лежит на прямой, сопряженной с первой прямой.
Из этих условий следует, что любая плоскость в пространстве предметов имеет сопряженную плоскость в пространстве изображений. Теория идеальной оптической системы формулирует простые правила геометрического построения изображений объектов (правила нахождения сопряженных точек, линий, плоскостей) путем введения понятий кардинальных точек, главных и фокальных плоскостей, обладающих определенными свойствами.
Пусть OO′ является идеальной оптической системой, AA′– ее оптической осью (рис. 1). Проведем луч MQ в пространстве предметов параллельно оптической оси AA′. Точка пересечения лучей MQ и AO будет находиться на бесконечно большом расстоянии слева от системы OO′, на продолжении оптической оси. Луч O′A′ сопряжен с лучом AO, так как оптическая ось является нормалью ко всем преломляющим поверхностям системы, и лучи, идущие вдоль оптической оси, проходят систему без преломления.
Рис.1. Положение кардинальных точек
Следовательно, бесконечно удаленной точке слева от системы будет сопряжена точка F' , лежащая на луче O' A' в пространстве изображений.
Точка F ' называется вторым, или задним, фокусом системы. Лучу MQ будет сопряжен луч Q' M ' , проходящий через задний фокус F' .
Продолжим лучи MQ и Q' F ' до пересечения в точке N' .
Плоскость, проходящая через точку N' перпендикулярно оптической оси, называется второй, или задней, главной плоскостью системы. Точка
H ' - точка пересечения этой плоскости с оптической осью системы называется второй, или задней, главной точкой.
Аналогичными рассуждениями при рассмотрении хода лучей в обратном направлении устанавливается существование первого, или
переднего, фокуса системы F, первой, или передней, главной плоскости и первой, или передней, главной точки H.
Главные плоскости системы обладают тем свойством, что всякий
460
отрезок в одной плоскости изображается равным и одинаково расположенным отрезком в другой плоскости, т.е. линейное увеличение для этих плоскостей равно единице.
Плоскости, проходящие через точки фокусов F и F' перпендикулярно
оптической оси, называются, |
соответственно, |
передней и |
задней |
фокальными плоскостями. Расстояние HF , отсчитываемое от передней |
|||
главной точки H , называется |
передним фокусным расстоянием |
f . На |
|
рис. 1 это расстояние отрицательно , так как отсчет ведется против хода лучей. Расстояние H ' F ' , отсчитываемое от задней главной точки H′,
называется задним фокусным расстоянием.
В идеальной оптической системе определяют еще две сопряженные точки K и K ' , лежащие на оптической оси и обладающие таким свойством, что сопряженные лучи, проходящие через точки K и K ' , параллельны друг другу, потому что углы k и k' равны (рис. 2).
Рис. 2. Узловые точки идеальной системы K и K'
Угловое увеличение для этих точек равно единице. Точки K и K'
называются, соответственно, передней и задней узловыми точками.
Плоскости, проходящие через узловые точки перпендикулярно оптической оси, называются узловыми плоскостями. В оптических системах, слева и справа от которых среды одинаковы, узловые точки совпадают с соответствующими главными точками. Если среды слева и справа от оптической системы различны, то узловые точки лежат на оси на расстоянии f' и f от соответствующих фокусов.
Главные точки H и H ' , точки фокуса F и F' и узловые точки K и K '
имеют общее название кардинальных точек оптической системы.
Положение этих шести точек полностью (кардинально) определяет свойства любой оптической системы.
2.Матрицы преобразований
2.1.Матрица перемещений
Рассмотрим количественные соотношения между сопряженными
461
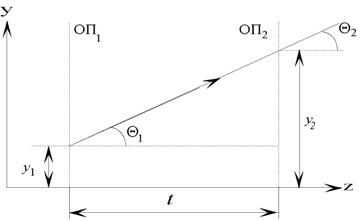
лучами. В декартовой системе координат (ось OZ совпадает с оптической осью системы и направлена слева направо; ось OY расположена в плоскости страницы; ось OX направлена от нас) будем рассматривать только лучи, лежащие в одной плоскости с главной оптической осью (рис. 3).
Рис. 3. Распространение света между плоскостями
В выбранной системе координат положение луча в любой плоскости Z = const и перпендикулярной оси OZ (назовём её опорной плоскостью ОП) будет полностью определено, если известна координата y (точка
пересечения луча и плоскости) и угол наклона луча к оси OZ . Рассмотрим, как преобразуются координаты луча y и Θ при распространении света от плоскости ОП1 до плоскости ОП2, расстояние между которыми t.
Если на плоскости ОП1 луч имел координаты y1 и Θ1, то на плоскости ОП2 его координаты будут
y |
|
= y |
t Θ |
, |
(1) |
|
2 |
1 |
1 |
|
|
Θ2 |
= Θ1. |
|
|
||
Впараксиальном приближении уравнения системы станут линейными
ипримут следующий вид:
y |
|
= 1y |
|
t Θ , |
|
(2) |
|
2 |
|
1 |
1 |
|
|
Θ2 = 0 y1 1Θ1. |
|
|||||
Для удобства расчетов заменим величину угла луча Θ величиной V=nΘ
–направляющим косинусом; n – показатель преломления среды, в которой распространяется луч.
Если n отлично от единицы, то толщину оптического промежутка t необходимо заменить приведенной толщиной T = (t/n) . С учетом сделанных
замен система (2) примет вид
y |
|
= 1y |
TV |
, |
(3) |
|
2 |
1 |
1 |
|
|
V2 = Oy1 1V1. |
|
||||
Запишем систему уравнений (3) в матричной форме:
462
. y |
2 |
|
|
1 |
T |
|
y1 |
|
(4) |
|
|
|
|
|
|
1 |
|
|
|
|
|
V2 |
|
|
0 |
|
|
V1 |
|
|
||
Таким образом, перемещение лучом на оптическом промежутке с показателем преломления n и толщиной t между плоскостями ОП1 и ОП2
описывается матрицей перемещения
Г |
1 |
T |
(5) |
= |
. |
||
t |
O |
1 |
|
2.2. Матрица преломления
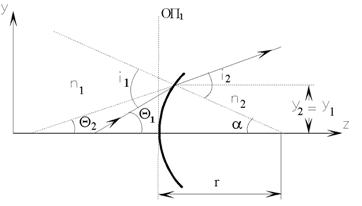
Рассмотрим, как преобразуются координаты при прохождении луча сферической границы раздела сред с показателями преломления n1 и n2 (рис. 4).
Рис. 4. Преломление луча на сферической поверхности
Пусть сферическая поверхность имеет радиус кривизны r , а центр кривизны расположен справа от точки пересечения поверхностью оптической оси. Проведем через эту точку плоскость ОП1 перпендикулярно оптической оси (рис. 4).
В параксиальном приближении можно считать, что положение, но не форма поверхности преломления совпадает с плоскостью ОП. В реальных расчетах углы Θ для параллельных лучей не превышают 0,1 радиана (около 6о). При этом погрешность вычислений не превышает 1%.
На рис.4 угол падения луча обозначен i1 а угол преломления – i2 Эти углы связаны законом преломления, который в линейном приближении (sin i = i ) имеет вид
n1 i1 |
= n2 i2 . |
(6) |
По рис.4 видно, что эти углы связаны также следующим соотношением:
i |
= |
|
; |
i |
|
= |
|
; |
= arcsin |
y1 |
= |
y1 |
. |
(7) |
1 |
2 |
2 |
|
|
||||||||||
1 |
|
|
|
|
|
|
r |
|
r |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Решая совместно (6) и (7), получим на границе раздела сред
463
n n
n2 2 = 2 r 1 y1 n1 1 . (8)
Для второй координаты луча на границе раздела сред справедливо равенство
|
|
|
y2 = y1 = y0 . |
|
|
|
(9) |
||||||
В матричной форме |
уравнения |
преобразования координат |
(8) и |
||||||||||
(9)имеют вид |
|
|
1 |
|
|
0 |
|
|
|
|
|
|
|
y |
2 |
|
|
|
|
|
y |
|
|
||||
|
|
|
|
|
n2 n1 |
|
|
1 |
|
(10) |
|||
|
= |
|
|
|
|||||||||
V |
2 |
|
|
r |
|
1 |
V |
|
|
||||
|
|
|
|
|
|
|
1 |
|
|||||
Матрица преобразования из (10) называется |
матрицей преломления. |
||||||||||||
Ее удобно записать в виде |
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
|
|
|
R |
= |
|
|
|
(11) |
|||||
|
|
|
|
|
, |
|
|
|
|||||
|
|
|
|
|
|
|
F |
1 |
|
|
|
|
|
где F = n2 n1 – оптическая сила поверхности. |
|
|
|||||||||||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
Матрица преломления |
R |
правильно описывает преломление луча и в |
|||||||||||
других случаях: при замене мест граничащих сред, изменении знаков кривизны поверхности, при наличии отрицательных величин углов Θ.
Аналогично можно получить матрицы преобразования лучей и для других оптических элементов: плоских и сферических зеркал, плоской границы раздела сред и так далее. Важно при расчетах соблюдать правила знаков:
1)отрезки, отсчитываемые вдоль оптической оси, считаются положительными, если их направление совпадает с направлением распространения света, и отрицательными, если их направление противоположно направлению распространения света; радиусы кривизны поверхности отсчитываются от вершины поверхностей;
2)углы падения и преломления отсчитываются от нормали к преломляющей поверхности и считаются положительными, если они образуются вращением нормали по ходу часовой стрелки, и отрицательными, если нормаль надо вращать против хода часовой стрелки; точно так же знаки определяются и для углов наклона к оптической оси.
2.3. Матрица преобразования лучей для сложной оптической системы
Сложной оптической системой будем считать систему, состоящую из нескольких оптических элементов. Это может быть и одна линза, и устройство, состоящее из многих линз. Рассмотрим на примере толстой линзы порядок записи и вычислений результирующей матрицы
464
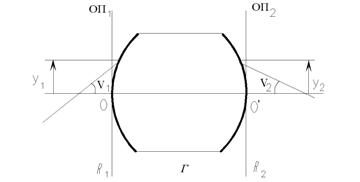
преобразования луча. Проведем через вершинные точки линзы две опорные плоскости, ограничивающие рассматриваемую систему: ОП1 – входная плоскость, ОП2 – выходная плоскость (рис.5). Наша линза будет действовать на падающий слева луч следующим образом: на входной поверхности падающий луч преломится. Это преобразование будет описываться матрицей преломления R1. Далее - от плоскости ОП1 до плоскости ОП2 луч будет распространяться по прямой. Здесь будет работать матрица перемещения Г и, наконец, на плоскости ОП2 опять произойдет преломление по матрице R2 .
Рис. 5. Преобразование лучей сложной оптической системой
При записи полного преобразования на толстой линзе необходимо двигаться от выходной опорной плоскости к входной, то есть
φ |
|
y |
|
(12) |
2 |
=R2 |
ГR1 1 |
. |
|
V2 |
|
V1 |
|
|
Таким образом, матрица преобразования для сложной системы представляет собой произведение элементарных матриц преобразования, записанных в обратном порядке (от выходной плоскости к входной).
При умножении элементарных матриц целесообразно время от времени проверять, равен ли единице определитель результирующей матрицы, полученной к данному моменту. Если он окажется не равным единице, это будет означать, что при вычислении была допущена ошибка, ибо все R и Г матрицы сами по себе унимодулярные.
3. Матричное описание свойств оптической системы
Пусть матрица преобразования сложной оптической системы имеет вид
A |
B |
(13) |
M= |
. |
|
C |
D |
|
Уравнение преобразования координат для этой системы в развернутом виде записывается следующим образом:
y2 |
= A |
B y1 |
|
, |
(14) |
|
|
|
|
|
|
|
|
V2 |
|
C D V1 |
|
|
|
|
где AB BC = 1. Выясним физический смысл коэффициентов |
матрицы |
|||||
465
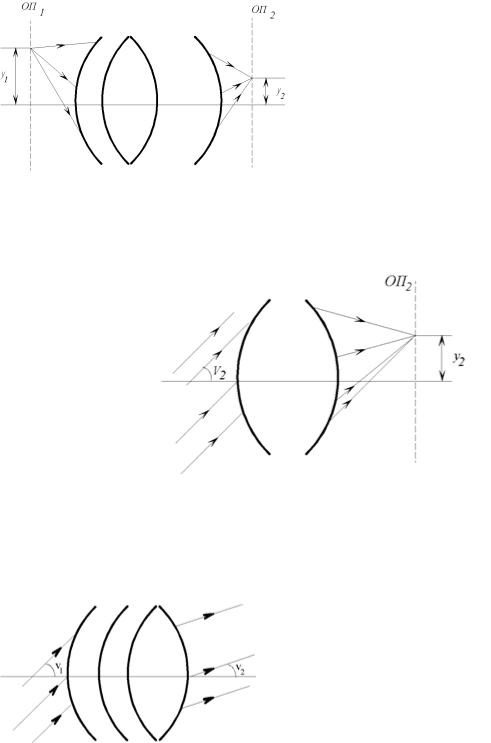
преобразования. Положим,что B = 0 , тогда для координаты y имеем |
|
y2 = Ay1 OV1 = Ay1 . |
(15) |
Уравнение означает, что все лучи (V1 – любое), выходящие в пространстве предметов из точки с координатой y1 , соберутся в пространстве
изображений в одной точке с координатой y2 (рис. 6).
Таким образом, точка-объект и
точка-изображение |
являются |
сопряженными. Величина |
A = y2 /y1 |
дает поперечное |
увеличение системы. |
|
Пусть A = |
0 . Уравнение для y2 в |
|
этом случае примет вид |
|
|
y2 |
= BV1 . |
(16) |
Из (16) следует, что все параллельные
Рис.6. Сопряженное преобразование лучи, входящие в систему под одним углом V1 , после системы соберутся в одну точку с координатой y2 .
Следовательно, точка y2 должна находиться на задней фокальной плоскости
(рис. 7).
Рис. 7. Преобразование параллельных лучей
Рассмотрим случай C = 0 , когда оптическая система будет менять угол наклона лучей по закону
V2 = DV1 |
(17) |
и все параллельные лучи, входящие в систему, параллельно из нее и выйдут
|
(рис. 8). |
|
|
|
|
|
Такая |
система |
называется |
||
|
афокальной |
или |
телескопической. |
||
|
Элемент матрицы D определяет угловое |
||||
|
увеличение |
системы. |
Определитель |
||
|
матрицы (13) равен 1 при условии C = 0 и |
||||
Рис.8. Ход лучей через афокальную |
A = 1/D . |
|
D = 0 , то можно |
||
Если в |
(13) |
||||
систему |
|||||
|
записать |
|
|
|
|
466
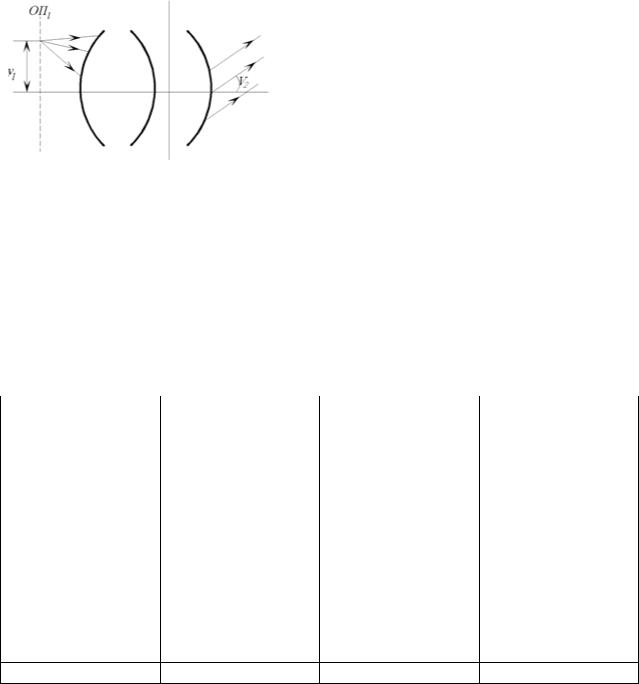
V2 = Cy1 . |
(18) |
Уравнение (18) показывает, что все лучи, исходящие из точки с координатой y1 на опорной плоскости в пространстве предметов, покинут
систему параллельным пучком. Следовательно, точка-объект находится на передней фокальной плоскости (рис.9).
|
Элементы |
|
|
матрицы |
|
преобразования |
(13) |
позволяют |
|
|
рассчитать |
положение |
всех |
|
|
кардинальных |
точек |
|
системы. |
|
Расположим |
входную |
|
опорную |
|
плоскость ОП1 на вершине первой |
|||
|
преломляющей поверхности системы, |
|||
Рис.9. Преобразование лучей, исходящих |
а выходную опорную плоскость ОП2 |
|||
из точки на передней фокальной плоскости |
совместим с вершиной |
|
последней |
|
|
преломляющей |
поверхности. |
||
Предположим, что n1 и n2 - соответственно показатели преломления сред,
расположенных слева и справа от оптической системы. Функции связи элементов матрицы преобразований с расстояниями от опорных плоскостей до кардинальных точек приведены в табл. 1.
Таблица 1
Расчёт положения кардинальных точек
|
Описываемый |
Измеряемый |
Функция от |
Частный |
||
|
параметр |
от |
до |
матричных |
Cлучай |
|
|
системы |
|
|
элементов |
n1=n2=1 |
|
1 |
фокус |
|
ОП1 |
F |
N1D/C |
D/C |
1-е фокус. |
|
F |
H |
-n1/C |
-1/C |
|
расстояние |
|
|
|
|
|
|
1-я главная точка |
ОП1 |
Н |
N1(D-1/C) |
(D-1)/C |
||
1 |
узловая точка |
ОП1 |
К |
(Dn1-n2)/С |
(D-1)/C |
|
2 |
фокус |
|
ОП2 |
F′ |
|
|
1-е |
фокус. |
|
|
|
|
|
расстояние |
|
|
|
|
|
|
1-я главная точка |
|
|
|
|
||
В качестве иллюстрации возможностей матричного описания оптических систем в приложении дано решение конкретной задачи.
Приложение
467
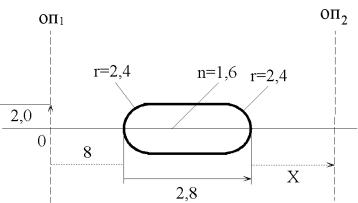
Задача
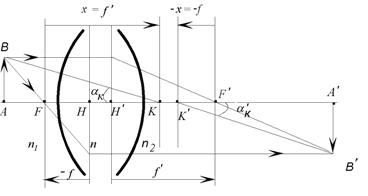
Оба конца стеклянного цилиндрического стержня длиной 2,8 см имеют форму выпуклой сферической поверхности радиусом 2,4 см. Предмет в виде стрелки длиной 2 см помещен на оси стержня в воздухе на расстоянии 8 см от левого конца стержня (рис. 10). Требуется найти положение и размер окончательного изображения.
Рис.10. Чертеж к задаче
Решение
Если окончательное изображение расположено справа на расстоянии х см от правого конца стержня, то цепочка матриц запишется в общем виде: M M1 M 2 M 3 M 4 M 5 , где M1 - промежуток от изображения до стержня;
M2- правый конец стержня; M3 - длина стержня; M4- левый конец стержня; M5- промежуток от стержня до предмета. В числах задачи матрица M имеет следующее выражение:
1 |
|
X |
|
(1 |
1 |
|
0 |
2,8 |
|
|
|
1 |
1) |
0 |
1 |
8 |
|
|||
|
|
1,6) |
|
1 |
1,6 |
|
(1,6 |
|
= |
|||||||||||
M = 0 |
|
1 |
|
|
|
2,4 |
|
1 |
|
|
|
2,4 |
|
1 |
0 |
1 |
||||
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|
||||
= |
1 |
|
X |
1 |
|
0 1 |
1,75 |
1 |
|
0 1 |
8 |
|
|
|||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
= |
|
|
|||||
|
0 |
|
|
0,25 1 0 |
1 0,25 |
1 0 |
1 |
|
|
|||||||||||
|
|
|
|
|
1 |
X |
|
1 |
0 |
|
1 |
|
8 |
= |
|
|
||||
|
|
|
|
= |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
0 |
0,25 |
0,5625 |
0,25 |
1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
1 |
X |
0,5625 |
|
6,25 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
= |
|
1 |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0,391 |
|
2,56 |
|
|
|
|
|||||
468
Следовательно,
A |
B |
0,5625 0,391X |
6,25 2,56X |
||
|
|
= |
0,391 |
2,56 |
. |
C |
D |
|
|
||
Чтобы выполнялось соотношение связи между предметом и его изображением, элемент B матрицы преобразований необходимо приравнять нулю, то есть должно выполняться равенство 2,56 X = 6,25. Следовательно,
X = 2,44 см |
(справа от стержня). |
Увеличение |
1/D = 1/2,56 = 0,39. |
Следовательно, |
изображение стрелки |
перевернуто |
и его размер равен |
(2 0,39) см = 0,78 см. |
|
|
|
Список литературы
Бутиков Е.И. Оптика / Е.И.Бутиков.- М.:Высш. шк., 1986.
Джеррард А. Введение в матричную оптику / А.Джеррард, Дж.M.Бå рч.-
М.:Мир, 1978.
Мешков И.Н. Электрическое поле / И.Н.Мешков, Б.В.Чириков. - Новосибирск,: Наука, 1987.Ч.2.
Апенко М.И. Прикладная физика / М.И.Апенко, А.С.Дубовик.-
М.:Наука,1971.
Ландсберг Г.С. Оптика / Г.С.Ландсберг.- М.:Наука,1976.
Сивухин Д.В. Общий курс физики / Д.В.Сивухин. М.:Наука, 1985.-Т.4.
469