

лабы по оптике
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
1 0 |
|
|
|
|
|
1 |
a a aa |
|
||||||||
|
|
a |
|
|
a |
f |
|
|
|||||||||||
1 |
|
1 |
|
|
1 |
|
|
|
|
f |
|
(1) |
|||||||
M = |
o |
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
a |
. |
|||
|
1 |
|
|
|
0 |
1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|||||||||||||||
|
|
f |
|
|
|
|
_ |
|
|
|
1 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
f |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Поскольку преобразование сопряженное (см. уравнение 16 и рис. 6 в работе [1]), элемент матрицы B (1) равен нулю:
a a' aa' |
= 0 |
(2) |
f |
|
|
Из (2) следует уравнение Гаусса (формула тонкой линзы):
1 |
|
1 |
= |
1 |
. |
(3) |
a |
a' |
|
||||
|
|
f |
|
|||
Обозначим через X расстояние от предмета AB до точки переднего фокуса F, а через X' - соответствующий отрезок в пространстве изображений (рис.1), из уравнения (3) легко получим уравнение Ньютона
X X ' = ( f )2 . |
(4) |
Уравнения (3) и (4) лежат в основе экспериментальных методов определения фокусных расстояний линз.
1.1. Определение фокусного расстояния по расстоянию предмета и его изображения от линзы
В этом способе измерений на оптический рельс выставляются осветитель, револьверная диафрагма в качестве предмета, исследуемая линза и экран (рис. 2).
Перемещая по рельсу линзу, добиваются четкого изображения диафрагмы на экране. После этого производят измерения отрезков a и a' . Далее, передвинув экран или предмет (диафрагма), опять производят настройку на резкое изображение предмета и повторяют измерения отрезков a и a' .
450
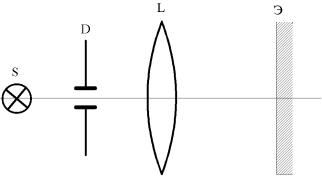
Рис.2. Блок-схема экспериментальной установки: S-источник света; D-диафрагма; L-линза; Э-экран
Из-за неточности визуальной оценки резкости изображения следует провести не менее десяти измерений. Часть измерений должна быть при уменьшенном изображении диафрагмы на экране, а часть при увеличенном. Полученные значения расстояний наносят на график с осями 1/a и 1/a' . По экспериментальным точкам проводят прямую линию, рассчитанную методом наименьших квадратов. Эта линия отсечет на осях отрезки, равные 1/f .
1.2. Определение фокусного расстояния по величине предмета и его изображения и по расстоянию предмета от линзы
В матрице (1) при сопряженном преобразовании элемент A есть величина поперечного увеличения ([1]уравнение 16), тогда при величине предмета, равной l , а величине его изображения, равной l' , имеем
|
l' |
= 1 |
a |
|
; l' = al l. |
(5) |
|
|
f |
|
|||
|
l |
|
f |
|
||
В уравнении (5) величина l' |
взята со знаком минус, так как линза |
|||||
строит перевернутое изображение. |
|
|
|
|
||
Схема измерений по этому методу такая же, как и на рис. 2. При |
||||||
известном размере предмета l |
|
(диафрагмы) измеряются |
величина |
|||
изображения l' и расстояние от линзы до диафрагмы a . Измерения проводят не менее чем для десяти положений линзы. Методом наименьших квадратов строят зависимость l' от a и по тангенсу угла наклона этой прямой определяют фокусное расстояние линзы f .
1.3. Определение фокусного расстояния посредством зрительной трубы
Известно, что лучи от точечного источника света, помещенного в фокус линзы, пройдя ее, идут параллельным пучком.
Измерения данным методом проводят следующим образом. Собирают оптическую схему, как на рис. 2, только вместо экрана устанавливают
451
зрительную трубу. Зрительную трубу предварительно фокусируют на бесконечность путем наведения ее на достаточно удаленный (более 10 м) предмет. Наблюдая в трубу, перемещают линзу по рельсу до тех пор, пока не появится изображение диафрагмы. При такой установке линзы расстояние от линзы до диафрагмы будет равно фокусному. Измерения проводят десять раз, смещая линзу и заново устанавливая ее на резкое видение диафрагмы. Результаты статистически обрабатывают.
1.4. Определение фокусного расстояния по величине перемещения линзы (метод Бесселя)
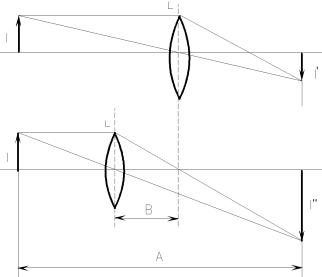
Если расстояние от предмета до изображения, которое обозначим через A , более 4 f , то всегда найдутся два таких положения линзы, при которых на
экране получаются отчетливые изображения: в одном случае увеличенное, в другом - уменьшенное (рис. 3).
Рис. 3. Метод Бесселя
Применяя формулу Гаусса (3), можно показать, что оба положения линзы будут симметричны относительно середины отрезка A, а фокусное расстояние линзы определяется выражением
f = |
A2 B 2 |
, |
(6) |
|
4A |
||||
|
|
|
где B - расстояние между двумя положениями линзы.
Метод Бесселя применим как для тонких, так и для толстых линз. Измерения проводят несколько раз, меняя расстояние A от предмета до экрана.
2. Определение фокусного расстояния рассеивающей линзы
452
2.1. Определение фокусного расстояния по расстоянию предмета и его изображения от линзы
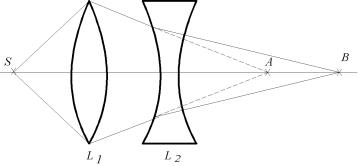
Действительного изображения предмета с помощью рассеивающей линзы получить нельзя, поэтому в данном методе предполагается совместное использование собирательной и рассеивающей линз. Если на пути лучей, выходящих из точки S и сходящихся в точке A после преломления в собирательной линзе L1 , поставить рассеивающую линзу L2 так, чтобы
расстояние AL2 было меньше её фокусного расстояния, то изображение точки S удалится от точки A и займет положение в точке B (рис. 4).
Рис. 4.Определение фокусного расстояния рассеивающей линзы
Если теперь рассмотреть обратный ход лучей, считая точку B предметом, то легко заметить, что точка A является мнимым изображением точки B .
Обозначая отрезок BL2 через a , а отрезок AL2 через b и учитывая, что
f и b имеют отрицательные знаки (правило знаков), |
запишем формулу |
|||||
Гаусса (3): |
|
|
|
|
|
|
|
1 |
= |
1 |
1 . |
(7) |
|
|
||||||
|
f |
|
a |
b |
|
|
Из (7) следует: |
|
|
|
ab |
|
|
|
f = |
|
. |
(8) |
||
|
|
|
||||
|
|
|
a b |
|
|
|
Измерения фокусного расстояния рассеивающей линзы проводят следующим образом. Устанавливают на оптический рельс осветитель, револьверную диафрагму и линзу L1 . С помощью экрана находят положение
изображения диафрагмы - точку A . Чтобы получить большую точность, эти измерения проводят несколько раз. Далее привязывают (измеряют расстояние) точку A к линзе L1 или источнику света (диафрагме) S . После
453
этого между линзой L1 и точкой A устанавливают рассеивающую линзу L2 и
определяют новое положение изображения диафрагмы - точку B . Так же, как и для точки A , проводят усреднение положения точки B и привязку точки B к одному из элементов оптической системы. После этого по формуле (8) определяют фокусное расстояние.
2.2. Определение фокусного расстояния рассеивающей линзы при помощи зрительной трубы
Как и в предыдущем методе, на оптический рельс устанавливают источник света, револьверную диафрагму и собирательную линзу L1 . Как и в
разделе 2.1, ищется положение точки A и осуществляется ее привязка к одному из элементов оптической системы. После этого на рельс устанавливают исследуемую рассеивающую линзу L2 и зрительную трубу,
сфокусированную на бесконечность. Перемещая линзу L2 вдоль оптической оси установки, добиваются такого расположения линзы L2 , когда ее фокус
совпадет с точкой A . В этом случае отрицательная линза сформирует параллельный пучок света, который после зрительной трубы опять трансформируется в изображение диафрагмы. Отрезок между линзой L2 и
точкой A будет равен фокусному расстоянию линзы. Заключительную часть этого упражнения - определение положения линзы L2 - следует провести
несколько раз, затем результаты статистически обработать.
3. Определение кардинальных точек оптических систем
Ранее отмечалось, что положение точек фокуса тонких линз можно определить путем фокусирования параллельного пучка света. Этот же прием годится и для толстых линз, и для сложных оптических систем, но расстояния от точек переднего и заднего фокуса до соответствующих линз в сложных оптических системах не обязательно должны быть равными.
3.1.Определение точек фокуса оптической системы
Вэтом упражнении параллельный пучок света создается коллиматором. Коллиматор состоит из линзы и источника света или освещенной щели, которые расположены в фокусе линзы. На выходе такой системы формируется параллельный пучок света. Для выполнения этого упражнения на оптический рельс устанавливают осветитель, коллиматор, исследуемую оптическую систему и экран. Перемещая экран вдоль рельса, получают четкое изображение щели коллиматора. Изображение будет находиться в задней фокальной плоскости. Измеряют расстояние от изображения до задней вершинной точки. Для определения передней
454
фокусной точки разворачивают оптическую систему на 1800 и проводят аналогичные измерения. Измерения проводят несколько раз, результаты усредняют.
3.2. Определение передней и задней главных точек
Далее коллиматор убирают, а на его место устанавливают револьверную диафрагму в качестве предмета. С помощью экрана определяют положение изображения диафрагмы. Измеряют расстояния от предмета и изображения до соответствующих линз оптической системы, а затем рассчитывают отрезки X и X ' (см. рис. 1). Далее по формуле Ньютона
(4) определяется фокусное расстояние оптической системы. Зная фокусное расстояние и расстояния от точек фокуса до линз, легко определить положение соответствующей (передней или задней) главной точки.
Для большей точности все измерения необходимо провести несколько раз. Результаты измерений изобразить графически.
4. Экспериментальное определение элементов матрицы оптической системы
Иногда бывают ситуации, когда необходимо включить имеющуюся оптическую систему как составной элемент в более сложную систему. Чтобы рассчитать свойства большой оптической системы, необходимо знать матрицы преобразований ее составных элементов. В этом разделе будет рассмотрен метод, позволяющий экспериментально определить матрицу преобразований оптической системы.
Рассмотрим положительную систему линз, находящуюся в воздухе. Матричное уравнение преобразования в общем случае имеет следующий вид:
y |
|
A |
B y |
|
(9) |
|
2 |
= |
1 |
|
|
v2 |
C |
D v1 |
|
||
Расположим предмет известного |
размера l |
на расстоянии R от |
|||
оптической системы (рис. 5), тогда действительное изображение размера l' будет располагаться на расстоянии S от выходной опорной плоскости ОП2
оптической системы.
455

Рис. 5. Схема определения матричных элементов
Матрица преобразования лучей от плоскости предмета к плоскости изображения с учетом (9) будет иметь вид
|
1 |
S |
A |
B 1 |
R |
|
M |
1 |
|
|
|
|
|
|
0 |
C |
D 0 |
1 |
(10) |
|
A SC |
|
|
|
|||
AR B S(CR D) |
||||||
|
C |
|
|
CR D |
. |
|
|
|
|
|
|||
Верхний левый элемент матрицы M |
A SC представляет поперечное |
|||||
увеличение системы, а нижний |
правый элемент |
CR D есть величина, |
||||
обратная поперечному увеличению [1]. Величину CR D обозначим через( < 0, если изображение перевернуто). Верхний правый элемент матрицы M равен нулю, так как преобразование ведется между сопряженными плоскостями. Определитель матрицы равен единице. Величина отношения высоты предмета к высоте изображения связана линейной зависимостью с
расстоянием R от предмета до оптической системы: |
|
|
||
|
= CR D. |
(R) |
|
(11) |
Функциональную |
зависимость |
легко |
определить |
|
экспериментально, путем перемещения предмета в направлении к ОП1 вдоль
оси и измерения высоты изображения (высота предмета известна).
Пусть эта зависимость имеет вид прямой линии, показанной на рис. 6.
Рис. 6. Определение
456
|
элементов С и D |
Тангенс угла наклона этой прямой равен C и |
|||||
определяется как |
|
1 |
2 |
|
|
||
|
|
C = |
, |
(12) |
|||
|
|
|
|
||||
|
|
|
R R |
2 |
|
|
|
где 1 |
и 2 , R1 и R2 |
1 |
|
|
|
||
- соответствующие параметры оптической системы для |
|||||||
двух сопряженных положений предмета и экрана. Аппроксимируя прямую
до значения |
R = 0, найдем матричный элемент |
D . Приравнивая в матрице |
|
M верхний правый элемент нулю, получаем, с учетом (11), |
|
||
|
AR B = S(CR D) = S = , |
(13) |
|
где введена |
новая величина , численные |
значения которой |
легко |
определить экспериментально. Если теперь построить график зависимости от R, то легко найти матричные элементы A и B точно так же, как были
найдены элементы C и D . После того как определены все элементы матрицы оптической системы, следует убедиться, что определитель матрицы AD BC приблизительно равен единице. В противном случае следует искать ошибку в измерениях и расчетах. При выполнении этого эксперимента необходимо около десяти раз изменять расстояние между предметом и экраном, каждый раз получая четкое изображение предмета и измеряя величину изображения l' , а также отрезки R и S . Графики строятся методом наименьших квадратов.
5. Экспериментальная установка
Экспериментальная установка состоит из осветителя с блоком питания, крана, набора линз в специальных оправах, коллиматора, зрительной трубы и оптического рельса. Все линзы, используемые в работе, пронумерованы, номера выбиты на оправах. Радиусы кривизны линз помещены в таблицу, которая находится на рабочем месте. При выполнении заданий необходимые линзы вставляют в держатели с механизмом, позволяющим смещать линзы в направлении перпендикулярном оси штока. Держатели линз устанавливают на необходимую высоту в рейтерах, которые могут перемещаться вдоль рельса. Таким образом, всегда имеется возможность посредством перемещения линз в трех направлениях выставить все элементы установки на оптическую ось (совместить оптические оси отдельных элементов).
6.Задания
1.Определить экспериментально фокусное расстояние собирательной линзы четырьмя методами, рассмотренными в разделе 1 настоящих указаний. Рассчитать фокусное расстояние исследуемой линзы по значениям радиусов кривизны поверхностей. Полученные результаты сравнить.
2.Определить экспериментально методами, изложенными в разделе 2,
457
фокусное расстояние рассеивающей линзы. Определить фокусное расстояние рассеивающей линзы по значениям радиусов кривизны поверхностей линзы.
3.Составить матрицу преобразований оптической системы, показанной на рис. 4. По измеренным значениям расстояний от источника света до собирательной линзы и от отрицательной линзы до изображения при известном значении оптической силы собирательной линзы рассчитать по матрице преобразования фокусное расстояние отрицательной линзы.
4.Пользуясь матрицей преобразования и табл. 1 из [1], рассчитать положение кардинальных точек оптической системы. Полученные результаты сравнить и изобразить графически.
5.Методом Бесселя определить фокусное расстояние толстой линзы. Составить матрицу преобразований для толстой линзы и, пользуясь ею и значениями расстояний от предмета и изображения до линзы, рассчитать фокусное расстояние толстой линзы. Экспериментально определить положение кардинальных точек толстой линзы. Эти значения рассчитать матричным методом и пользуясь табл. 1 из [1]. По значениям фокусного расстояния и радиусов кривизны определить показатель преломления материала линзы. Результаты измерений и расчетов представить графически. Все результаты представить в стандартной форме.
7.Контрольные вопросы
1.Назовите основное приближение геометрической оптики.
2.Каковы основные положения оптики Гаусса?
3.Какой пучок называется параксиальным?
4.Какое преобразование называется стигматическим?
5.Вычислите фокусное расстояние собирательной линзы с помощью матрицы преобразования.
6.Может ли двояковыпуклая линза быть рассеивающей?
7.Может ли быть собирающей двояковогнутая линза?
8.Какая система называется телескопической?
9.Чему равно фокусное расстояние телескопической системы?
10.Запишите матрицу преобразования для плоской границы раздела двух сред с показателем преломления n1 и n2 .
11.Чему равно фокусное расстояние оптической системы из двух компонент с фокусными расстояниями f1 и f2 ?
12.Нарисуйте ход лучей через рассеивающую линзу.
Список литературы
1.Сухов Л.Т.. Лабораторный практикум по оптике: Учеб. пособие / Л.Т.Сухов; Краснояр.гос.ун-т. - Красноярск,2003. КрасГУ, 2003.
2.Физический практикум /Под ред. В.И.Ивероновой. - М.: Наука,1968.
458
Тема 5. Геометрическая оптика. Матрицы
В этой теме кратко рассматриваются теоретические, с использованием элементов матричной алгебры, основы расчёта прохождения лучей через простые и сложные оптические системы. Электромагнитное поле видимого света характеризуется очень быстрыми колебаниями или, что то же самое, малостью длин волн (порядка 10 5 см). Поэтому можно ожидать, что для законов распространения видимого света получится хорошее первое приближение, если полностью пренебречь конечностью длин волн. Такая процедура справедлива для решения многих оптических задач, и в этом приближении ( 0 ) оптические законы можно сформулировать на языке геометрии.
Современная теория геометрической оптики, разработанная Гамильтоном, достаточно сложна и абстрактна. Более простой теорией, позволяющей приближенно решать многие задачи прикладной оптики, является теория идеальной оптической системы, созданная Ф.Гауссом в 1841 году.
1.Идеальная оптическая система
Идеальной оптической системой называется система, которая отображает любую точку пространства предметов стигматически: пучки лучей, идущие от любой точки предмета после прохождения системы, собираются в одной точке. Расчеты показывают, что стигматическое отображение возможно лишь в том случае, когда пучок лучей, идущий от точки объекта, составляет с осью оптической системы малый угол или, другими словами, лежит в параксиальной области. В противном случае прямолинейность распространения света будет нарушаться и изображение объекта будет искаженным.
Оптических систем, которые давали бы стигматическое изображение независимо от углов наклона пучков относительно оптической оси и размеров предмета, за исключением плоских зеркал, в природе не существует. Отсюда и слово "идеальная" в названии теории.
Теория идеальной оптической системы предполагает следующее:
а) каждой точке пространства предметов соответствует только одна точка в пространстве изображений, они называются сопряженными точками обоих пространств;
б) каждой прямой линии пространства предметов соответствует только одна прямая линия пространства изображений, и эти линии называются сопряженными;
в) если какая-либо точка в пространстве предметов лежит на некоторой
459