

Advanced control engineering (S.R. Burns, 2001)
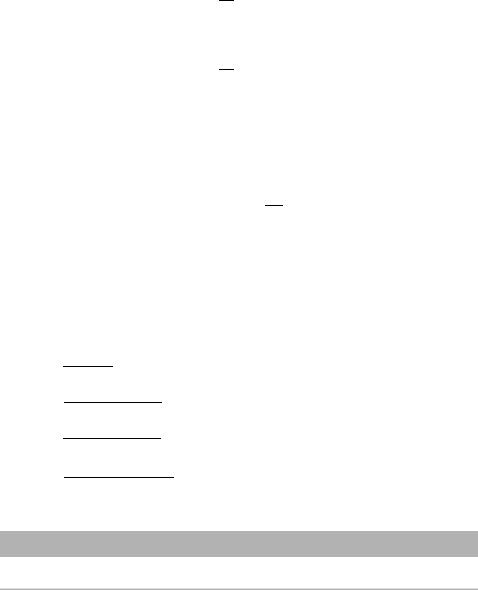
.pdf|G(jω)|
ζ = 0.1
dB
10 |
|
|
|
ζ = 0.2 |
|||
|
|
|
|
||||
|
|
|
|
ζ = 0.4 |
|||
0 |
|
|
|
ζ = 0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ζ = 0.8 |
|||
–10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ζ = 1.0 |
|
|
|
|
|
|
|
|
|
|
ζ = 1.5 |
|
|
|
|
||
–20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ζ = 2.0 |
|
|
|
|
||
–30 |
|
|
|
|
|
|
|
–40 |
|
|
|
|
|
|
|
–50 |
100 |
101 |
|||||
10–1 |
|||||||
ω
ωn
(a)Log modulus
0 |
|
ζ = 0.1 |
|
|
|
|
|
G(jω) |
|
|
|
|
|
||
(degrees) |
|
|
|
|
|
|
|
ζ = 0.2 |
|
|
|
|
|||
|
|
|
|
|
|
||
–50 |
|
|
|
|
|
|
|
|
|
ζ = 0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ζ = 1.5 |
|
|
|
|
|
|
|
|
ζ = 0.6 |
|
|
|
||
|
|
|
|
|
|
||
–100 |
|
|
|
|
|
|
|
|
|
|
ζ = 0.8 |
|
|
||
|
|
|
|
|
|
||
|
ζ = 2.0 |
|
|
|
ζ |
= 1.0 |
|
–150 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–200 |
|
101 |
10–1 |
100 |
ω
ωn
(b)Phase
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
$ |
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ # |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
# |
|
$ |
|
|
||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
$ $ |
|
|||||
|
|
|
|
|
|||||||
|
|
||||||||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
$ |
|
||||||
|
|
$ $ |
$ |
|
|||||||
|
|
|
|||||||||
|
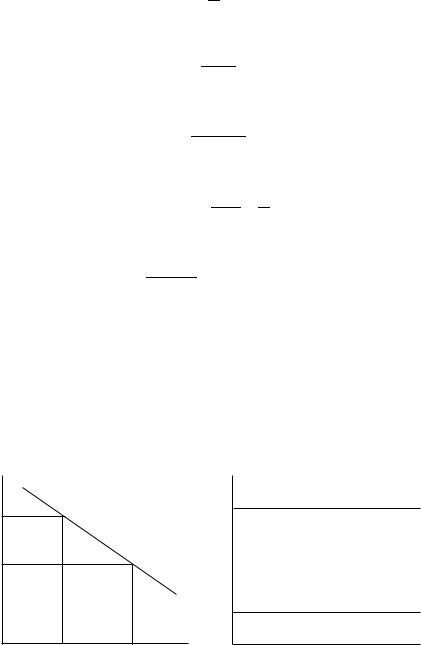
|G(jω)| |
|
|
|
G(jω) |
|
|
|
|||
|
dB |
–6 dB/octave |
|
(degrees) 0 |
|
|
|
||||
|
K |
(–20 dB/decade) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–90 |
|
|
|
|
|
1.0 |
K |
log ω |
|
|
|
|
|
log ω |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
$ |
|
|
|
|
|
# |
|
|
||
|
|
|
|
||
|
|
# |
|
|
|
|
|
||||
|
|
|
|
|
|
10 |
|
|
|
|
|
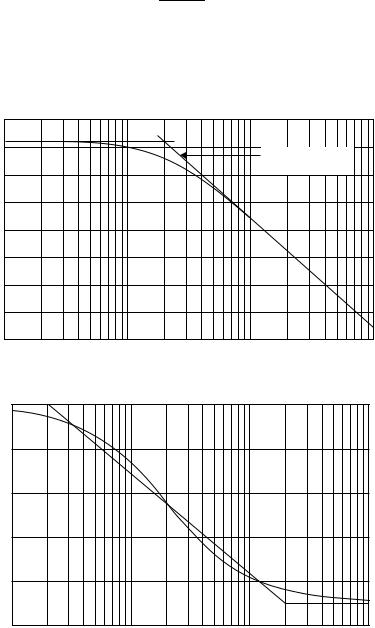
|G(jω)| 5 |
|
|
|
|
|
dB |
|
|
|
– 6 dB/octave |
|
0 |
|
|
|
|
|
–5 |
|
|
|
|
|
–10 |
|
|
|
|
|
–15 |
|
|
|
|
|
–20 |
|
|
|
|
|
–25 |
|
|
|
|
|
–30 |
100 |
|
101 |
102 |
|
10–1 |
2 |
|
|||
|
|
|
|
ω (rad/s) |
|
(a) Bode Gain
0 |
|
|
|
|
G(jω) |
|
|
|
|
(degrees) |
|
|
|
|
–20 |
|
|
|
|
–40 |
|
|
|
|
–60 |
|
|
|
|
–80 |
|
|
|
|
–100 |
100 |
|
101 |
102 |
10–1 |
2 |
|||
|
|
|
|
ω (rad/s) |
(b) Bode Phase
$ #
$ |
|
|
# # |
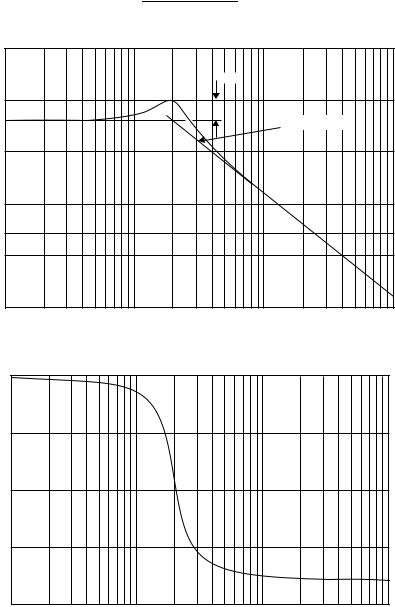
40
|G(jω)|
dB |
8 dB |
20 |
|
|
|
|
12 |
|
|
|
–12 dB/octave |
0 |
|
|
|
|
–20 |
|
|
|
|
–40 |
|
|
|
|
–60 |
|
|
101 |
102 |
10–1 |
100 |
2 |
||
|
|
|
|
ω (rad/s) |
(a) Bode Gain
0
G(jω)
(degrees)
–50 |
|
|
|
|
–100 |
|
|
|
|
–150 |
|
|
|
|
–200 |
100 |
|
101 |
102 |
10–1 |
2 |
ω (rad/s)
(b) Bode Phase
$ $ $
$
$
$
$
$ #
$
$ $
$
$ #
$ # #
#
$ # #
$ # #
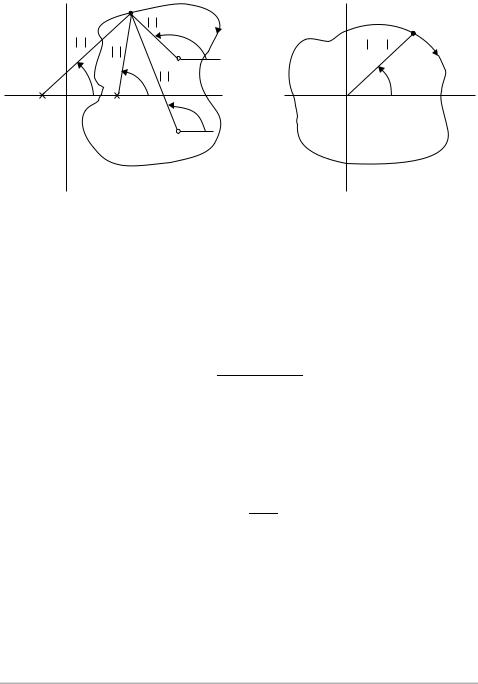
jω |
s1 |
|
Im |
|
|
||
|
a |
φz1 |
s1 |
d |
|
||
c |
|
F(s) |
|
|
|
|
|
φp2 |
φp1 b |
|
F(s) |
|
σ |
|
|
|
|
Re |
|
|
|
φz2 |
|
(a) s-plane |
(b) F(s)-plane |
|
|
|
|
|
|
|
|
$ |
|
||
|
|
|
|
|
|
$ |
# # |
|
|
# # |
||||
|
|
|||
$
|
|
$ |
|
|
|
|
|||||
|
|
||||
|
|
|
|
|
|
$ # |
|
||||
$ $
$ #
# $
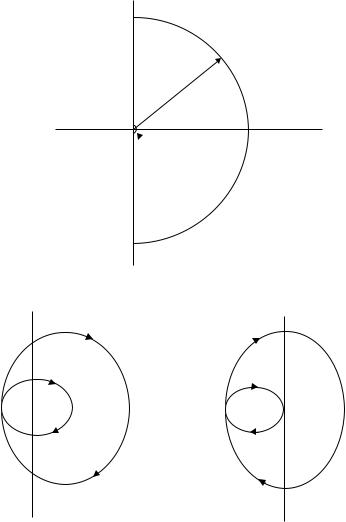
+jω
r → ∞
σ
 ε
ε
–jω
Im
Im
|
|
|
|
|
ω = ∞ |
ω = 0 |
|
|
|
|
|
|
|
|
|
Re |
|
(–1, j0) |
ω = –∞ |
ω = 0 |
Re |
||
(a) 1 + G(s)H(s) plane |
(b) G(s)H(s) plane |
#
$
$ #
$
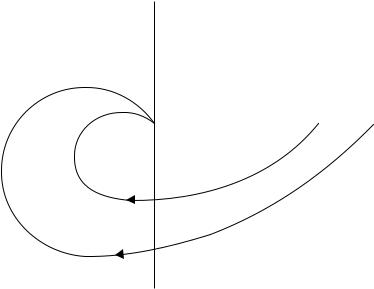
M
|
|
|
Im |
|
|
|
|
G(jω)H(jω) plane |
|
|
|
|
ω = 0 |
|
|
|
|
|
|
|
j0) |
|
Re |
|
(–1, |
ω = ∞ |
|||
|
|
|
|
|
|
|
|
Stable |
|
Unstable |
|
|
|
|
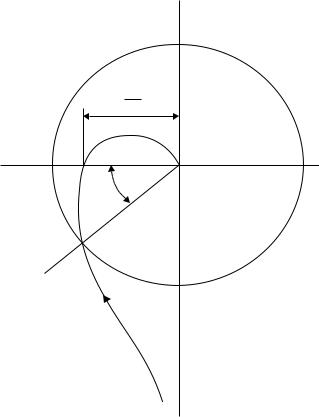
Im
Unit circle
1
GM
(–1, j0) |
Re |
PM
|
|
|
|
|
|
$ |
|
|
|
|
|
|
|
|
|||
|
|||||
|
|
|
|
||
$ |
|||||
|
|
|
|
|
|
$ $ |
|
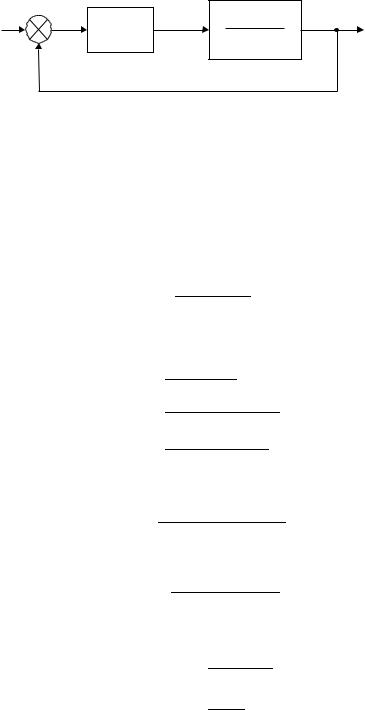
Controller |
Plant |
|
|
R(s) |
|
C(s) |
|
+ |
4 |
||
|
|||
K1 |
s(s2 + 2s + 4) |
|
|
– |
|
|
$ # #
$
$ # #
$
# #
$ #
$
#
$
#
$
$