

Advanced control engineering (S.R. Burns, 2001)
.pdf$ |
|
|
|
|
|
||
$ |
|
|
|
|
|
|
|
$ |
|
|
|
$
$
$
$
$
$
$ $
$
$ # |
|
# |
|
|
|
$ |
|
|
|
# |
$ |
|
$ |
|
|
|
|
|
|
$ |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
||||||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
$ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# |
$ |
# |
|
|
|||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# $ # |
|
||||||||||||
|
|
$ |
|
|
# # |
|
# |
|
|
$ |
|
# |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
# |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
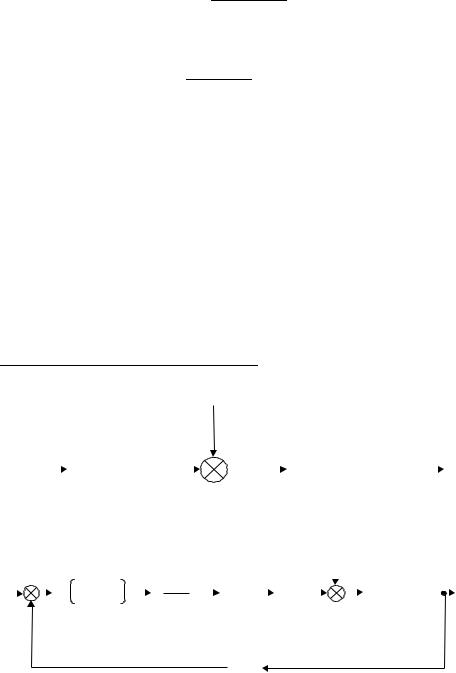
θs(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Qi(s) |
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θo(s) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
RT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 + RTCTs |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
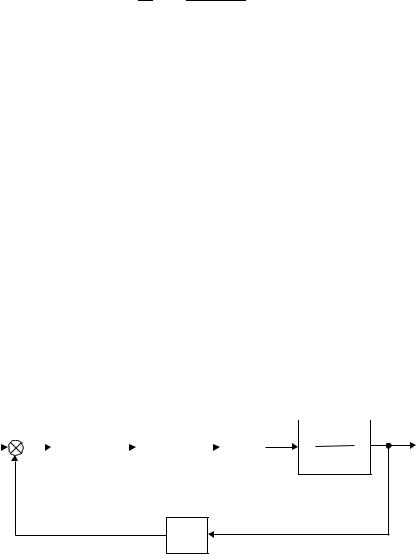
PID Controller |
Valve |
|
|
Burner |
|
|
|
|
|
|
|
|
|
|
|
|
θs(s) |
|
Room |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
θi(s) + |
|
|
|
K1 |
1 + |
1 |
+Tds |
U(s |
) |
K2 |
|
V(s) |
|
|
|
Qi(s) |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
1 |
|
|
θo(s) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 |
|
|
|
|
|
|
|
RT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
θm(s) |
– |
|
Tis |
|
1 + Tis |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
1 + RTCTs |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
# # |
# |
# |
|
||||||||
$ |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
# |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
# |
|
|
# |
|
|
# |
|
# # |
||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
$ |
|
|
|
||||||
M
$ $
$ $
$
|
$ |
|
|
|
# # |
|
$ |
|
|
|
|
|
|
|
|
# |
|
# |
|
||
|
|
|
|
|
|
M
$ $
$ $
$ $
|
|
$ |
# # |
|
|
# # # |
|||
|
|
|||
M
|
$ |
|
$ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
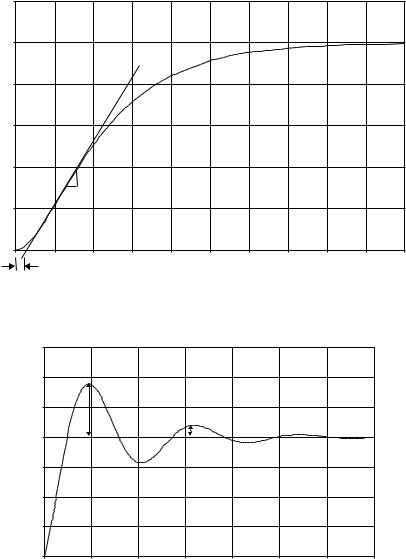
0.6 |
|
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
(°C) |
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Temperature |
0.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Actual |
0.2 |
|
|
|
|
|
|
|
|
|
|
|
R = 0.0306 |
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
50 |
|
|
0 D = 1.55 |
|||||||||
Time (s)
|
|
|
|||||||
|
|
35 |
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
(°C) |
25 |
|
|
|
|
|
|
|
|
Temperature |
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
20 |
|
|
|
a2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Actual |
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
0 |
5 |
10 |
15 |
20 |
25 |
30 |
|
|
|
0 |
35 |
||||||
Time (s)
M
M
M
$
$
$
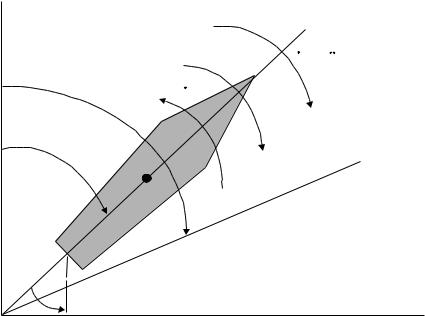
Xo
|
Actual Course |
|
ψa(t) ψa(t) |
Nrψa(t) |
|
ψd(t) |
|
IIz |
Nδδ(t) |
ψa(t) |
Desired Course |
|
G
δ(t)
Yo
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
$ |
|||||
|
|
|
|
|
|
$ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
$ # |
|
||||||||
$ #
$ |
|
$ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
$ |
|
# |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
# |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
$ |
# |
# |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
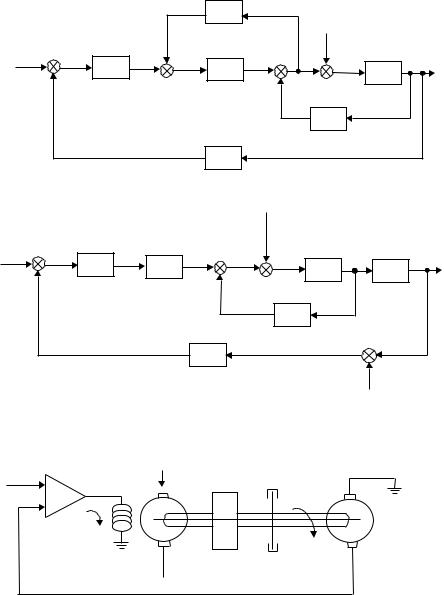
Steering |
|
|
|
|
|
Rudder |
Hull |
|||||||
|
|
|
|
|
Autopilot |
|
|
|
|
|
|
|
|
|
|
Dynamics |
||||||||||
|
|
|
|
|
|
|
|
|
|
Gear |
|
|
Characteristics |
|
||||||||||||
ψd(s) + |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
U(s) |
|
|
|
(s) |
|
|
|
|
|
|
|
|
1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
K1 |
|
K2 |
δ |
|
|
|
|
|
Nδ |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s(Izs + Nr) |
|||||||
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ψm(s)
ψa(s)
Gyro-Compass
H1
$ |
|
|
|
|
|
|
|
$ |
|
|||||||||||||||
$ |
$ |
|
||||||||||||||||||||||
$ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
$ # # |
||||||||||||||||||||||
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
$ |
# # |
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
$ |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
$ |
|
$ |
|
||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
$ |
|
$ |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1.4 |
|
|
|
|
|
|
|
|
|
|
|
|
1.2 |
|
|
|
|
|
|
|
|
|
|
|
(rad) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Heading |
0.8 |
|
|
|
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
Actual |
|
|
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
10 |
|
|
|
50 |
|
|
|
|
100 |
|
|
0 |
20 |
30 |
40 |
60 |
70 |
80 |
90 |
|||
Time (s)
$ # |
|
$ # #
# # #
$
# #
$ |
$ |
$ |
$ |
|
|
H3 |
R1 |
+ |
+ – |
|
G1 |
G2 |
|
– |
|
H1
|
|
R2 |
|
+ |
+ |
+ |
C |
|
|
|
|
– |
|
|
G3 |
|
|
|
|
|
|
H2 |
|
|
|
|
(a) |
|
|
|
|
|
|
R3 |
|
R1 + |
G1 |
+ |
|
+ – |
C |
|
|
||||
– |
G2 |
|
G3 |
G4 |
|
|
– |
|
|||
|
|
|
|
||
|
|
|
|
H2 |
|
|
|
H1 |
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
(b) |
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
||
|
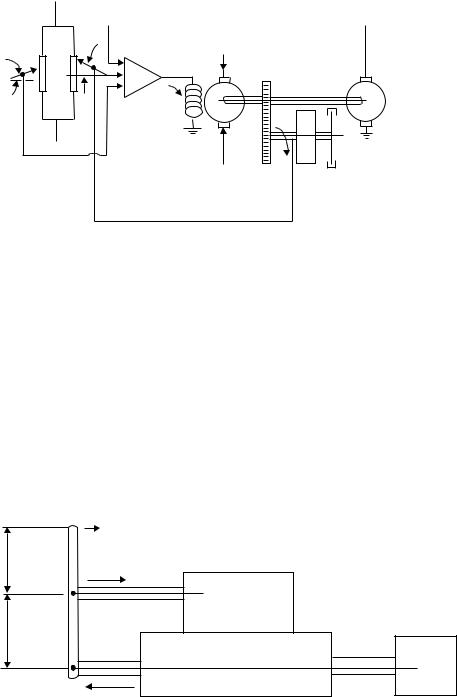
Amplifier |
Ia = constant |
|
|
|
|
|
|
|
|
|
vi(t) |
|
Field |
I |
C |
|
|
K1 |
Coil |
+ |
||
|
|
||||
|
|
|
|
||
|
|
|
|
|
Tachogenetator |
vo(t) |
if(t) |
|
|
|
H1 |
|
|
|
|
||
|
|
K2 |
|
ωo(t) |
– |
D.C. Servo-motor
Error |
+ |
|
Detector |
|
|
|
Velocity Feedback |
|
|
|
|
|
|
|
|
θo(t) |
|
θi(t) |
|
Ia = constant |
K1 |
K2 |
|
K3 Gear ratio ‘n’ |
H1 |
|
|
|
|
|
|
Tachogenerator |
|
Amplifier |
if(t) |
|
θo(t) |
|
|
|
|
|
|
|
|
|
|
Field Controlled |
Io |
Co |
|
|
|
D.C. Servo-motor |
|
|
|
|
|
|
|
|
Positional Feedback
|
|
|
|
|
|
|
|
|
$ # |
# |
# |
||||
|
|||||||
|
|
|
|
|
|
|
|
|
xi(t) |
a |
Spool-Valve |
|
xv(t) |
b |
|
|
Hydraulic Actuator |
|
m |
|
xo(t) |