

Advanced control engineering (S.R. Burns, 2001)
.pdf
|
|
|
|
|
|
|
|
|
|
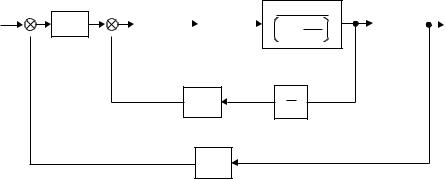
PI Controller |
|
Control valve |
Tank and valve |
||
|
|
|
|
|
|
|
|
Hd(s) + |
E(s) |
K1 |
1 + |
1 |
U(s) |
V1(s) |
Ha(s) |
|
|
|
Kv |
Rf |
|||
– |
|
|
|
Tis |
|
|
1+ARfs |
Hm(s) |
|
|
|
|
|
|
|
|
|
|
|
|
Pressure tranducer |
|
|
|
|
|
|
|
|
H1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
# |
|
|
|
|
|
|
|
|
$ |
|
# |
|
|
||||
|
|
|
|
|
# |
# |
||||||
|
|
|
|
|
|
# |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
# |
|
|||||
|
|
$ # # # |
||||||||||
|
|
|||||||||||
$ |
|
|
|
|
|
|
|
||
|
|
|
$ |
# |
|
|
|||
|
|
|
|
|
|||||
|
# |
|
# # |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
# $ |
|||||||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
$ |
|
$ |
$ |
|
||||||||||||
|
|
|
|
|
||||||||||||
|
|
|
# |
|
|
|
|
|
|
|||||||
$ |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
$ |
|
|
# $ |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

|
|
|
|
$ |
|
# |
|
||||||
|
|
|
|
|
# # |
|
|
||||||
|
$ # # |
|
|||||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
# |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|||||||||
|
$ |
# |
|
$ |
|
# |
|
|
# |
||||
|
# # |
|
# # |
||||||||||
# #
# $ # # # #
$ #
$ #
$
$ $ $
|
|
$ |
|
# |
|
|
|
|
# # |
||||
|
|
|
|
|||
$ |
|
# # |
# # |
||
|
|
|
|
|
|
$
$

(t) a h
6
5
4
3
2
1
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
|
t(s)
$ |
|
$ # |
# |
|
|
|
|||
|
|||
|
|
|
|
$ # #
$ # |
|
|
|
|
|
|
|
# |
|
|
|||
|
|
|
||||
$ # |
|
# |
|
|||
|
||||||

|
$ |
# # |
|
|
|
|
|||||
|
|
|
M
c(t)
 R
R
t(s)
D

M
|
|
|
|
|
|
M |
M |
|
|
|
M |
|
|
|
|
|
|
|
|
M
|
|
|
|
|
|
M |
M |
|
|
|
M |
|
|
|
|
M
|
|
|||
$ # |
|
|
||
|
|
|||
|
||||
|
|
|||
$ # |
|
|||
|
|
|
||
$ ! # " |
|
|||

$
$
$ |
|
$ |
|
|
|
|
$
$ |
|
|||
|
|
|
|
|
$ |
|
|
|
|
|
||||
xo(t), xo(t), 1o(t)
θo(t)
bX(t) |
m |
F(t) |
|
P |

$
$
$
$
$
$
$
$
$
$
$
|
|
|
|
|
|
||
$ # |
|
|
|
||||
|
|||||||
|
|||||||
|
|
|
|
|
|||
|
|
$ |
|
|
|
||
|
|
! # " |
|||||
|
|
|
|
|
|
|
|
||
|
|
|
||
|
$ |
|
||
|
|
|||
|
|
|
||
|
$ |
|
|
|
|
|
|||
|
|
|
||
|
|
|
||
|
$ |
|
||
|
|
|
|
$ |
|
|
|
|
|||||||||||
|
|
|
|
# # |
|||||||||||||||
|
|||||||||||||||||||
|
|
$ |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
# # # |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
$ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
# |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
# |
|
|
# |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Xd(s) +
– 
Xm(s)
Controller
U1(s)
+
K1
 –
–
B2(s)
|
Power |
DC |
||||
Amplifier Servomotor |
||||||
|
|
U2(s) |
|
Tm(s) |
||
|
K2 |
|
|
K3 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Tachogenerator
sθo(s)
H2
Machine
Table
n
pm + n2Im s p
1 p
Integrator sXo(s)
1 |
Xo(s) |
|
s |
|
|
|
|
|
|
|
|
H1
Position Transducer
$ $
$ $
$ $
$
$ # |
|
|
|
|
|
|
|
$ |
|
|
|
$ # |
|
|
|
$ |
|
||
|
|
|
|
$ |
|
$ |
|
|
|
# |
|
|
|
|
|||||||||
|
|
|
$ |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# |
|
|
|
|
|
|
|
|
|
|
|
||
$ |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
# |
|
|
|
|||||||
$ |
|
|
|
|
||||||||||
|
|
|||||||||||||
$ |
|
|
|
|
|
|
|
|
|
|
||||
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
$ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||