

Advanced control engineering (S.R. Burns, 2001)
.pdf
|
|
||||||||
$ $ |
|
|
|
$ |
|
|
|
||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
$ $ |
|
|
$ |
|
|
|
|||
|
|
||||||||
$
$ |
|
M M
|
|
|
|
|
|
|
I |
|
P(t) |
|
|
a(t) |
|
|
|
||
m |
|
|
|
α(t) |
||||
|
|
|
|
|
T(t) |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
(a) Translational Acceleration |
|
(b) Angular Acceleration |
|||||
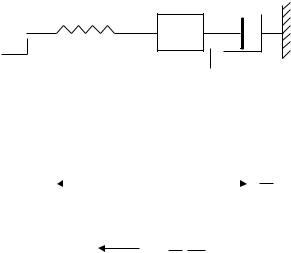
C K 
m
Spring
 Damper xi(t)
Damper xi(t) 
xo(t)
K(xi –xo) |
|
m |
|
dxo |
|
|
C dt |
||
|
|
|||
|
|
|
|
|
xo(t),dxo ,d2xo dt dt
|
|
|
$ |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
$ |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||||||
|
$ |
|
# |
|
|
||||||||||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
# $ |
|
|
||||||||||||
|
|
# |
|
|
|
|
|||||||||||
|
|
|
|||||||||||||||
M M |
|||||||||||||||||
|
|
|
|
|
$ |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
$ |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
$ |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
# $ |
|
|
|
|||||||||||
|
|
|
|
||||||||||||||

Torque T(t) |
|
C |
Angular velocity |
|
|
||
|
I |
|
ω(t) |
|
|
|
|
|
|
|
|
$
$
|
|
# $ |
|
|
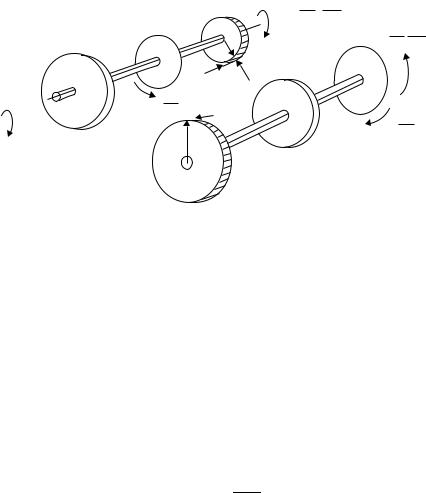
a and b are the pitch circle radii
Im Cm of the gears. Hence gear reduction ratio is n = b/a

 a Tm(t)
a Tm(t)  θm
θm 


b
θo(t)
Io |
Co |
|
|
|
dθm d2θm |
|
|
|
|
|
Cm |
|
θm(t) dt dt 2 |
|
θo(t) dθo d2θo |
||
Im |
|
|
C |
o |
|||
|
|
|
|
dt |
dt |
2 |
|
|
|
|
|
|
|
|
|
|
|
a |
Io |
|
|
|
|
|
|
X(t) |
|
|
|
|
|
Tm(t) |
dθm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cm dt |
X(t) |
|
|
dθo |
|
|
|
|
|
|
|
Co dt |
|
|
Motor Shaft |
|
b |
|
|
|
|
|
X(t) = Gear tooth |
Output Shaft |
|
reaction force |
||
|
$
$
$
$
$
$
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
$ |
|
|
|
|
||||||||||||
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
$ |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
$ |
|
|
|
|
|
|
|
|
# |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
# |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
$ |
$ |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
$ |
|
|
# |
|
|
||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
# |
|
# # |
|
|
$ |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||
# #
$ # $
$ # $
|
|
# |
|
$ |
|
|
|

R
v1(t) |
|
v2(t) |
|
||
|
|
|
 i(t)
i(t)
(a) Resistance
v1(t) |
L |
 i(t)
i(t)
(b) Inductance
v1(t) |
C |
i(t)
(c) Capacitance
v2(t)
v2(t)
|
|
||||||||
|
|
$ |
|
||||||
|
|
||||||||
|
|
$ |
|
|
|||||
|
|
|
|
||||||
|
|
|
|||||||
|
|
||||||||
|
|
$ |
|
||||||
|
|
|
|
||||||
|
|
$ $ |
|
|
|
|
|||
|
|
|
|
|
|||||
|
|
|
|||||||
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
||||
|
|
||||||||
$
$ |
|
|
|
|
|
||
|
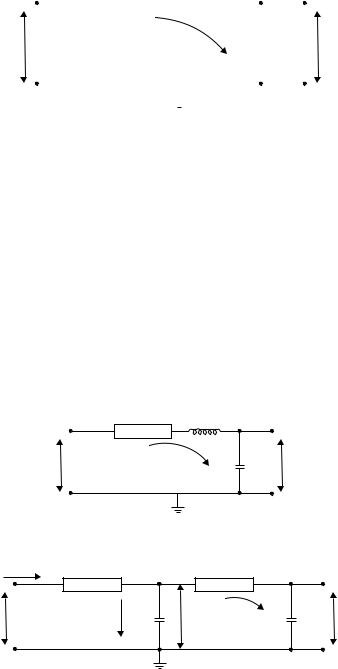
R
v1(t) |
|
|
|
|
|
|
|
|
|
|
|
v2(t) |
|
|
|
|
|
|
|
|
|
|
|
||
|
i(t) |
C |
|
|
|
|||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
$ |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|||
|
|||||||
|
|
||||||
|
|
|
|
|
|||
|
|
# $ |
|
||||
|
|||||||
|
|
R |
L |
|
v1(t) |
|
|
C |
v2(t) |
|
|
|
i(t) |
|
|
|
|
(a) |
|
i1(t) + i2(t) |
|
R1 |
|
R2 |
v1(t) |
i1(t) |
C1 |
v3(t) |
v2(t) |
i2(t) C1 |
(b)

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
$ |
# |
|
||
|
||||
|
||||
$ |
|
|
|
|
|
|
|||
|
|
|||
$
|
|
|
|
# |
|||||||
$ |
|||||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
# |
|
|
||||||
|
|
|
|||||||||
|
|
# |
|
# $ |
|
|
$ #
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|
$ |
|
|
|
||||||
|
$ |
||||||
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|
$ |
|
|
|
||||||
$ #
$ #
|
|
|
|
|
|
|
|
|
|
|
|
|
# |
|
|||||
$ |
|
|
|||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
$ |
|
|
# |
|
|
|
|||
|
|
|
|||||||
|
|
|
|
|
|
|
|||
|
|
# $ |
|
|
# |
|
# |
|
|
|
|
|
|
||||||
|
# # # |
|
# $ |
|
|
|
|
|
|
||
|
|
||||
|
|
|
$ |
|
|
$
$
$
$
$ $
|
A |
θ1 |
QT |
θ2

$ |
|
||
|
|
|
|
$ |
|
|
|
|
|
||
|
|||
|
|
$ |
|
|
|
$ |
|
$ |
|
$ |
|
|
|
$
$ |
|
|
|
$ |
|
|
|
$ |
|
|
|
|||
|
|
|
|
|
||||
|
|
|
||||||
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|||||
|
|
|||||||
|
||||||||
|
|
$ |
|
|
|
|
|
|