

Advanced control engineering (S.R. Burns, 2001)
.pdfTransformation |
Equation |
|
Block diagram |
Equivalent block diagram |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
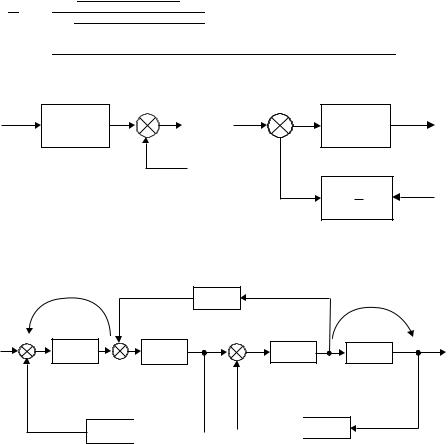
1. Combining |
|
|
X |
|
|
|
|
|
|
|
|
|
Y |
|
|
X |
|
|
|
|
|
|
|
|
|
|
Y |
|||||||||
blocks in |
Y =(G1G2)X |
|
|
|
|
|
G1 |
|
|
|
|
|
G2 |
|
|
|
|
|
|
|
|
|
|
|
|
G1G2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
cascade |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Combining |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
blocks in |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
Y |
||||
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
parallel; or |
Y = G1X –G2X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G1–G2 |
|
|
|
||||||||||
eliminating a |
|
|
|
X |
|
|
G1 |
+ |
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
forward loop |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
3. Removing a |
|
|
|
|
|
|
|
G2 |
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
. |
|
|
G1 |
|
+ |
|
Y |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
block from |
Y = G |
X +G X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
G2 |
|
|
|
G2 |
|
|
|
|
|
|
|
|||||||||||||||
a forward |
1 |
– 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
||
path |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. Eliminating |
Y = G (X + G Y ) |
X + |
Y |
X |
G1 |
Y |
||
a feedback |
||||||||
1 |
– 2 |
G1 |
. |
1 |
+ |
|
||
loop |
|
|
|
|||||
|
|
– |
|
– G1G2 |
|
|||
|
|
|
+ |
|
|
|
|
|
5. Removing a |
|
|
|
|
|
|
|
X |
1 + |
|
Y |
block from |
Y = G1(X |
+ |
|
G |
2 |
|
|
G1G2 |
|||
a feedback |
– G2Y) |
|
|
|
|
|
G2 |
|
|||
|
|
|
|
|
|
|
|
– |
|
||
loop |
|
|
|
|
|
|
|
|
|
+ |
|
6. Rearranging |
|
W |
+ |
|
+ |
|
|
W |
+ |
+ |
|
+ |
|
|
|
|
|
|
|
||||
summing |
+ |
|
+ |
|
+ |
Z |
|
+ |
+ |
|
|
Z = W – X –Y |
|
|
Y |
Z |
|||||||
points |
|
X |
|
– |
|
– |
|
– |
– |
||
|
Y |
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
7. Moving a |
|
X |
|
|
+ |
|
Z |
X + |
|
G |
Z |
summing |
|
|
G |
|
+ |
|
|
||||
Z = GX +Y |
|
|
+ |
|
|
|
|
||||
point ahead |
– |
|
|
|
|
|
– |
1 |
|
|
|
of a block |
|
|
|
|
|
– |
Y |
|
|
Y |
|
|
|
|
|
|
|
|
G |
|
|||
|
|
|
|
|
|
|
|
|
|
||
8. Moving a |
|
X + |
|
|
|
|
Z |
X |
G |
+ |
|
summing |
|
|
|
G |
|
|
+ |
Z |
|||
point |
+ |
|
+ |
|
|
|
|
||||
Z = G(X –Y) |
|
|
|
|
|
|
– |
|
|||
beyond |
|
Y |
|
– |
|
|
|
Y |
G |
|
|
a block |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
9. Moving a |
X |
Y |
X |
G |
|
take-off |
|||||
Y = GX |
G |
|
Y |
||
point ahead |
Y |
||||
|
|
||||
of a block |
Y |
|
|
G |
10. Moving a |
|
X |
|
|
|
Y |
X |
|
|
|
|
G |
. Y |
|||||
|
G |
|
|
|
|
|||||||||||||
take-off |
Y = GX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
point beyond |
|
X |
|
|
|
|
|
X |
|
1 |
|
|
|
|
|
|
||
a block |
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
$ |
$ |
|
|
$ |
|
|
|
|
|
|
|
|
|
$ |
# # |
|
|
|
|||
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
# # # |
|
|
|
||
|
$ |
|
|
|
|
|
|
|
# # # |
||||||
X |
|
G |
+ |
Z |
X + |
G |
Z |
|
|
|
|
|
|
||
|
|
|
+ |
|
+ |
|
|
|
|
|
– |
|
– |
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
1 |
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|||
|
|
Ahead |
|
H3 |
|
Beyond |
|
|
|
|
|
|
|
||
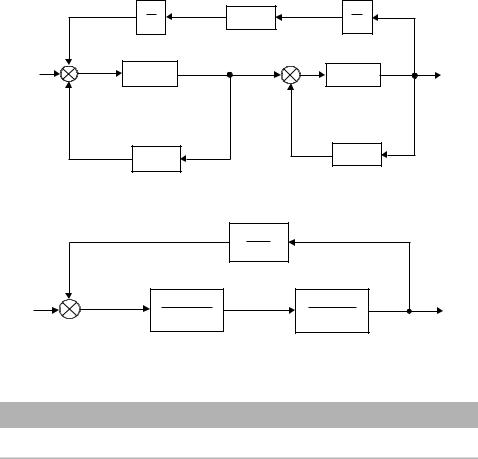
R(s) + |
|
+ |
– |
+ |
|
|
C(s) |
|
|
G3 |
G4 |
||||
– |
|
G1 |
|
G2 |
|
||
|
|
|
|
– |
|
|
|
H1 
 H2
H2
|
|
|
|
|
1 |
H3 |
1 |
|
G1 |
G4 |
|
|
|
||
R(s) |
+ – |
+ |
C(s) |
|
G1G2 |
|
G3G4 |
|
– |
– |
|
|
|
H1 |
H2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H3 |
|
|
|
|
G1G4 |
|
R(s) |
+ – |
G1G2 |
G3G4 |
C(s) |
|
|
1 + G1G2H1 |
1 + G3G4H2 |
|
$ #
|
|
|
|
||
|
# |
||||
|
|
$ |
|
||
|
|
|
|
||
|
|
# # |
|||
$
# #
$
#
|
|
|
||
|
|
$ |
|
# |
|
||||
|
# |
|||
|
|
|
|
|
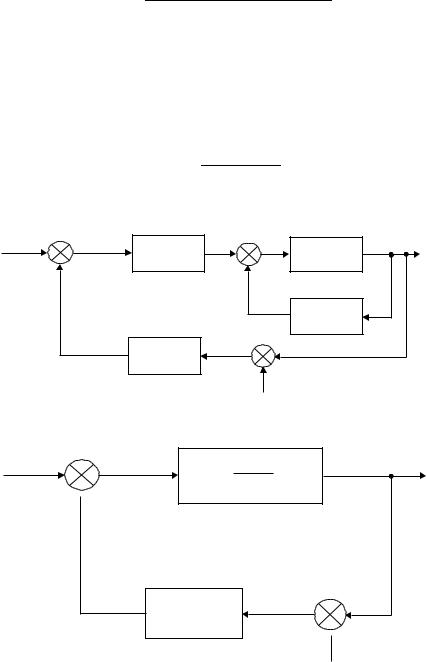
R1(s) + |
+ |
C(s) |
G1 |
|
G2 |
– |
– |
|
|
|
H2 |
H1 |
|
+ |
|
|
|
|
|
+ |
|
|
R2(s) |
R1(s) + |
G1G2 |
C(s) |
1 + G2H2
– 
+
H1
+ 
R2(s)
R1(s) + |
G1G2 |
C I(s) |
1 + G2H2
–
|
H1 |
|
|
|
|
+1 |
|
|
|||
|
|
|
|
|
|
|
|
R2(s) + |
|
C II(s) |
|
H1 |
–1 |
G1G2 |
|
1 + G2H2 |
|||
+ |
|
||
|
|
$
# #
|
|
$ # |
|
|
|
|
|
|
|
|
$ |
|
|
|
# # |
||||
|
|
$ |
|
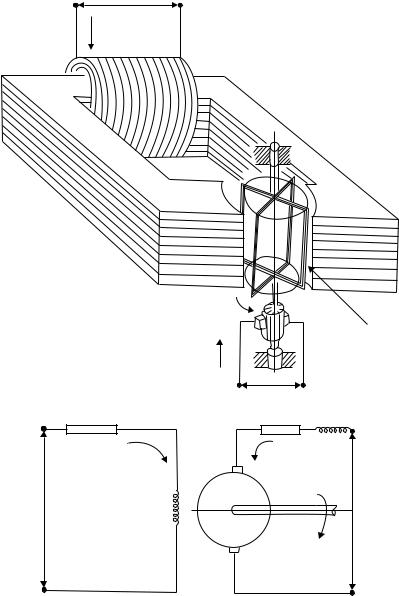
ef(t)
if(t)
Rf; Lf
(a) Physical Arrangement
Rf
if(t)
ef(t) |
Lf |
(b)Schematic Diagram
Field coil
θ(t)
ω(t)
ia(t)
Armature winding Ra; La
ea(t)
Ra La
ia(t)
ea(t)
θ(t), ω(t)
$ |
|
Ra |
La |
|
|
ia(t) |
Tm |
θ(t) ω(t) |
ea(t)
eb(t)
if
ef
$ $
$ $ $ $
$ $ $
$ $
|
|
$ |
|
|
|
$ |
|
|
|
$ |
|
$ |
|
$ |
|
|
|
$ |
|
# |
|
|
|
$ # |
|
$

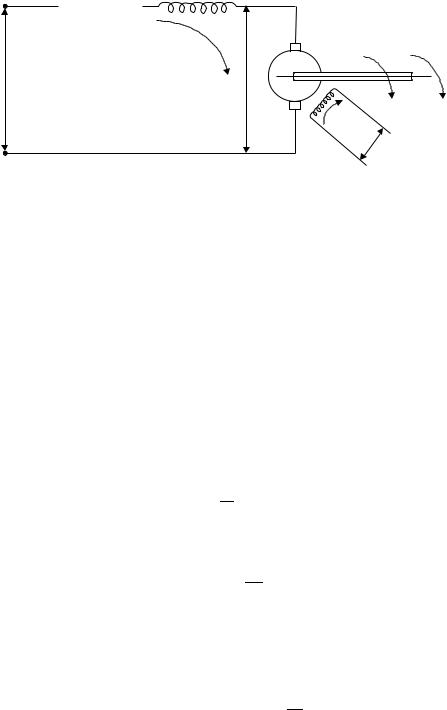
Ea(s) |
+ |
1 |
Ia(s) |
Tm(s) |
|
|
Las + Ra |
|
Ka |
|
|
|
|
|
|
|
– |
|
|
Eb(s)
ω(s)
Kb
$ |
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
$ |
|
|
|
$ |
|
$ #
$ #
|
|
|
|
|
|
|
|
|
|
Tm(t) |
|
|
|
|
|
|
(Nm)_ |
|
|
|
|
|
|
|
Increasing ea(t) |
|
|
|
|
|
|
|
ω(t) (rad/s) |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Ef(s) |
1 |
If(s) |
Tm(s) |
|
|
|
|
|
|
|
||
|
|
|
Lfs + Rf |
Kr |
|
|
|
|
|
|
|
|
|
$ |
|
|
|
|
|
|
|

Tm(t) |
Tm(t) |
Increasing ef(t) |
|
(Nm) |
|||
(Nm) |
|
||
|
|
||
|
Kf |
|
|
|
Rf |
|
ef(t) (V) |
ω(t) (rad/s) |
(a) |
(b) |
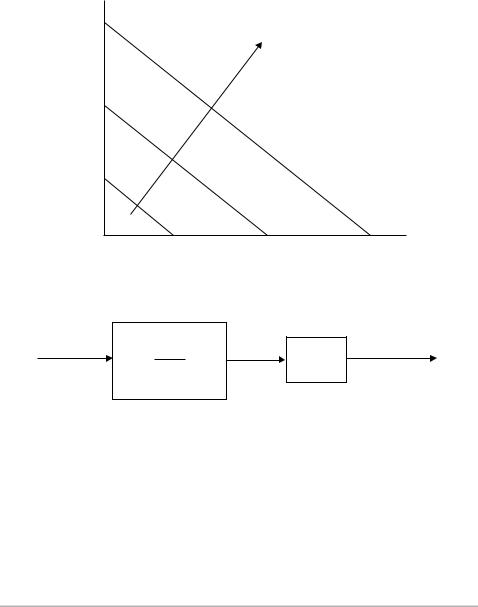
Pe = 0 |
Ps |
Pe = 0 |
Xv, xv
Q2 |
|
Q1 |
|
|
Xo, xo |
P2 V2 |
A |
A P1 V1 |
|
|
m |
(2) |
|
(1) |
|
|
Qleak |
$ $
#