

Advanced control engineering (S.R. Burns, 2001)
.pdfM
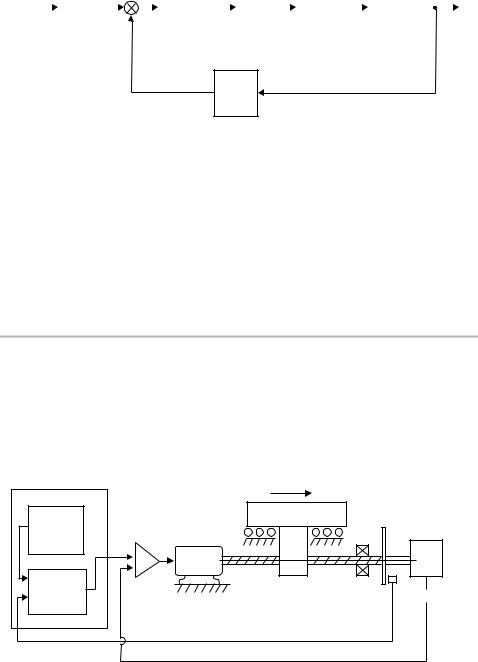
Desired |
|
Elevator |
|
Angle |
|
|
|
|
|
Control Signal |
Output Angular |
|
Control |
Sensor |
|
|
Column |
|
|
|
|
|
Actual |
|
|
Controller |
Angle |
|
|
|
|
Input |
|
|
|
Angular |
Measured Angle |
|
|
Sensor |
|
||
|
|
|
|
|
|
Hydraulic |
Electrohydraulic |
|
|
Cylinder |
Servovalve |
|
|
|
|
|
|
|
|
|
|
|
|
Fluid |
|
|
|
|
|
|
|
||||
Desired |
|
|
Error |
Control |
Flow-rate |
Hydraulic |
Actual |
||||||||||||||||
|
|
3 |
|
|
|
|
|
|
|
|
|
||||||||||||
Angle |
|
|
Signal |
Signal |
(m |
/s) |
|
|
Force |
Angle |
|||||||||||||
(deg) |
Input |
(V) + (V) |
|
(V) |
|
Servo- |
|
|
|
|
Hydraulic |
|
(N) |
|
(deg) |
||||||||
|
|
|
Angular |
|
|
|
|
Controller |
|
|
|
|
|
|
|
|
|
|
Elevator |
|
|||
|
|
|
|
– |
|
|
|
valve |
|
|
|
|
Cylinder |
|
|
|
|
||||||
|
|
|
Sensor |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Output |
|
(V) |
Angular |
|
Sensor |
||
|
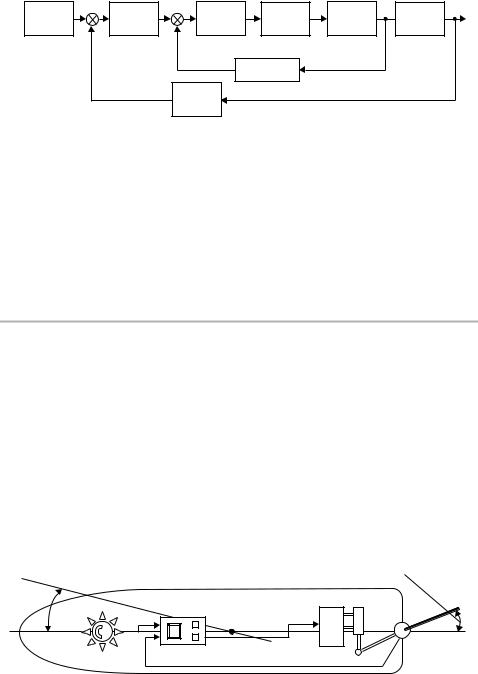
Computer |
|
|
|
Controller |
|
Machine Table Movement |
|
|
|
||
|
|
Shaft |
|
Computer |
|
Encoder |
|
|
|
||
Program |
|
DC-Servomotor |
|
|
|
||
|
|
Lead-Screw |
|
Digital |
Power |
Bearing |
|
Tachogenerator |
|||
Controller |
|||
|
|||
Amplifier |
|||
|
|||
|
|
Digital Positional Feedback |
|
|
|
Analogue Velocity Feedback |
|
Digital |
|
|
|
|
Control |
|
|
Actual |
|
|
Desired Position |
|
|
|
|
|
Actual |
||||
Digital |
|
|
|
Signal |
Torque |
|
Velocity |
|||
|
|
Error |
|
|
|
(V) |
(Nm) |
|
(m/s) |
Position |
|
|
+ (V) |
|
|
(m) |
|||||
|
+ |
|
|
DC |
|
|
|
|||
Computer |
Digital |
Power |
|
Machine |
Integrator |
|||||
Program |
– |
Controller |
|
– |
Amplifier |
Servo |
|
Table |
||
|
motor |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Analogue |
Tacho- |
|
|
|
|
|
|
|
Velocity Feedback |
|
generator |
|
|
|
|
||
|
|
Digital Positional |
Shaft |
|
|
|
|
|
|
|
|
|
Feedback |
|
Encoder |
|
|
|
|
|
|
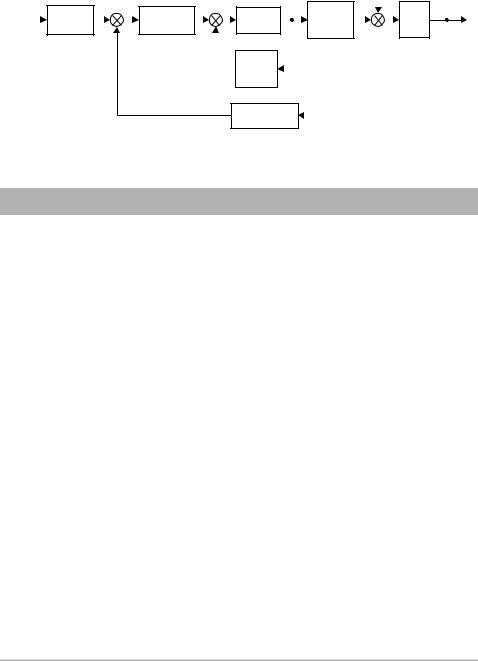
Desired Heading |
|
Actual rudder-angle |
Gyro-compass |
Auto-pilot |
Steering-gear |
|
Sensor |
|
Error |
|
|
|
|
|
Actual Heading |
|
Demanded rudder-angle |
|
|
|
|
|
Measured rudder-angle |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Actual |
|
Disturbance |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Demanded |
|
|
Moment |
|
|
|||||||||||||||||||
|
|
|
|
Course |
Rudder |
|
|
Actual |
|||||||||||||||||||||||||
Desired |
|
|
|
|
|
(Nm) |
|
|
|||||||||||||||||||||||||
|
|
|
Error |
|
|
Rudder |
|
Angle |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Heading |
||||||||||||||||||||||
Heading |
|
|
|
(V) |
|
|
Angle |
|
|
(deg) |
Rudder |
|
|
|
|
|
|
|
|
||||||||||||||
|
+ |
|
|
|
|
+ |
|
|
|
– |
(deg) |
||||||||||||||||||||||
(deg) |
Potentio- |
Autopilot |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
+ |
|
|
|
|
|
Steering |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Charact- |
|
|
|
|
|
|
|
Hull |
|
|
|
|
meter |
(V)– |
|
|
|
(Controller) (V)– |
|
|
|
Gear |
|
|
|
|
|
|
eristics |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rudder |
|
|
|
|
|
|
Rudder |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Angle |
|
|
|
|
|
|
Moment |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sensor |
|
|
|
|
|
|
|
(Nm) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Measured |
|
|
|
|
|
|
|
Gyro- |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Heading (V) |
Compass |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
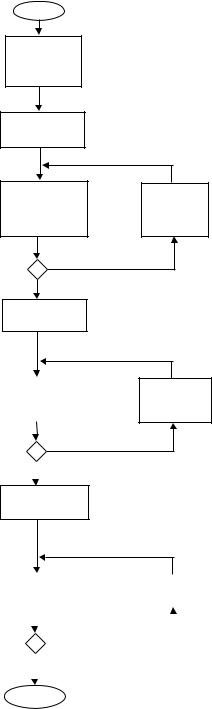
START
Define System
Performance
Specification
Identify System
Components
•
Model Behaviour
of Plant and
System
Components
No
Is Component
Response Acceptable?
Yes
Define Control
Strategy
|
|
• |
|
|
|
|
|
|
|
Simulate |
|
|
|
System |
|
|
|
Response |
|
|
|
|
|
Does Simulated |
|
No |
|
|
|
||
Response Meet |
|
Yes |
|
|
|||
Performance Specification? |
|
||
Implement
Physical System
•
Select
Alternative
Components
Modify
Control
Strategy
|
Measure System |
|
Modify Control |
|||
|
Response |
|
Strategy |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Does System |
|
|
No |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Yes |
|
|
|
||
|
|
|
|
|||
Response Meet |
|
|
|
|
||
Performance Specification? |
|
|
|
|
|
|
FINISH |
|
|
|
|||
|
|
|
|
|||
$ |
|
$ |
|
$ |
|
$ |
|
|
|
$ |
|
$ |
|
Forward Speed u(t) (m/s)
a
Accelerator angle θ(t) (degrees)
$ |
|
|||
|
|
|
||
$ |
|
|||
|
|
|
||
|
|
|
|
|
|
|
|||
$ |
|
|||
|
|
|
|
|
|
|
# $ |
|
|
|
|
|
|
$ |
|
||
$ |
|
|
|
|
|
||
|
|
# $ |
|
|
|
|
# |
|
# $ |
|
|
|
|
|
||||
|
|
# |
|
# |
|
# $ |
|
|
|
|
|
|
|||||

|
|
|
|
|
|
|
|
θi(t) |
θo(t) |
xi(t) |
xo(t) |
|
K |
||||||
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T(t) |
P(t) |
|
|
|
P(t) |
T(t) |
||||
|
|
|
|
||||||
|
(a) Translational Spring |
|
(b) Rotational Spring |
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
$ |
|
|||
|
|
|
|||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
$ |
|
|||
|
|
|
||||||
|
$ $ |
|
|
|
||||
|
|
|
||||||
|
|
|
|
|
|
|||
|
|
|||||||
|
$ $ |
|
|
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
C |
C |
|
P(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
ω(t) |
||
|
v(t) |
|
T(t) |
|||||
(a) Translational Damper |
|
|
|
|
(b) Rotational Damper |
|||
|
|
|
|
|
|
|
|
|