

otd
.pdfОбозначение на схеме
Схема измерения
δ |
|
L |
|

Коэффициент чувствительности тензодатчика определяется по формуле
k |
R / R |
||
L / L |
, |
||
|
|||
|
|
||
где: R – сопротивление датчика;
R – изменение сопротивления; L – длина (база) датчика;
L – изменение длины;
= L / L – относительная деформация.
Полупроводниковые тензодатчики имеют чувствительность
(7.1)
в 50-60 раз выше проволочных.
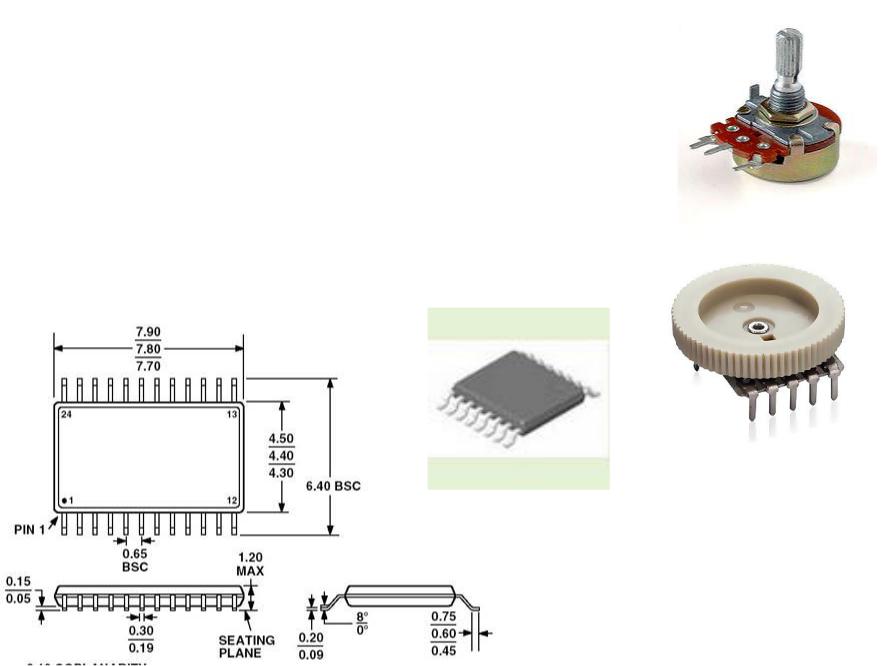
Потенцио́метр — регулируемый делитель электрического напряжения, представляющий собой, как правило, резистор с подвижным отводным контактом (движком).
С развитием электронной промышленности помимо «классических» потенциометров появились также цифровые потенциометры. Такие потенциометры, как правило, представляют собой интегральную схему, не имеют подвижных частей и позволяют программно
выставлять собственное сопротивление с заданным шагом.
Количество дискрет: 64; R,кОм: 10;
Uпит, В: 2,7…5,5;
Управление, интерфейс: SPI; Температурный диапазон, °С: -
40…+85
Большинство разновидностей переменных резисторов могут использоваться как в качестве потенциометров, так и в качестве реостатов, разница в схемах подключения и в назначении (потенциометр — регулятор напряжения,
реостат — силы тока).
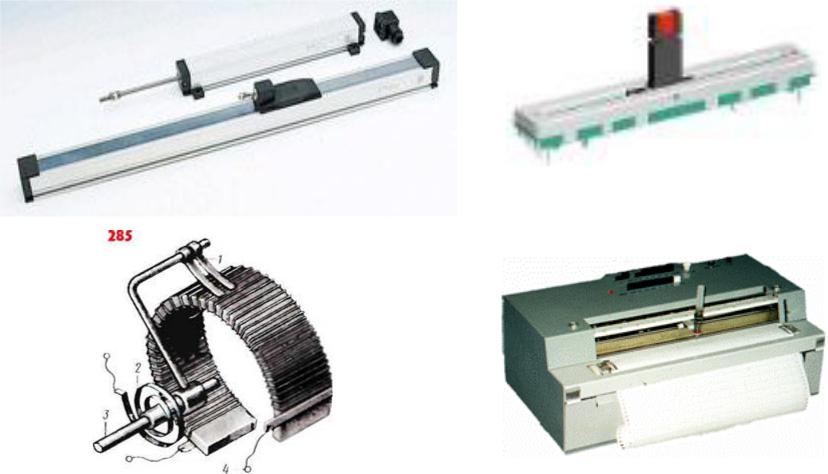
на основе прецизионных потенциометров построены многие типы датчиков углового или линейного перемещения.
Потенциометр самопишущий ПС-1
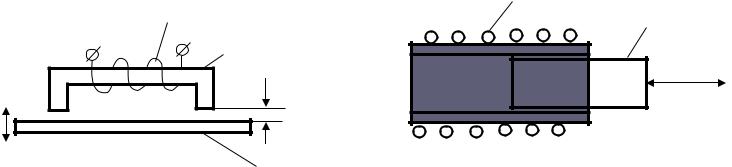
7.4. Индуктивные преобразователи
Принцип действия индуктивного преобразователя основан на изменении
индуктивного сопротивления xL= L, где = 2 – угловая частота;
L – индуктивность.
Единица измерения индуктивности Генри – индуктивность
контура, в котором при равномерном изменении тока 1 А/с возникает ЭДС самоиндукции 1 В.
Индуктивный преобразователь, рис. 7.1 представляет собой катушку индуктивности с сердечником, который имеет подвижный элемент (якорь), соединенный с измеряемым объектом в качестве якоря может быть использована ферромагнитная диафрагма.
|
|
|
1 |
а) |
|
1 |
б) |
|
2 |
||
|
U |
|
|
|
|
|
|
|
|
|
2 |
3 |
, |
(7.2) |
|
|
Рис. 7.1. Индуктивные преобразователи: а) с подвижным якорем; б) с подвижным сердечником; 1 – катушка; 2 – сердечник; 3 – якорь.

Если катушку индуктивности с сердечником и якорь закрепить на взаимно смещающихся частях механизма, то при изменении воздушного зазора (при перемещении якоря, рис. 7.1 а) изменяется индуктивное сопротивление магнитопровода, и, следовательно, индуктивность катушки L,
|
U |
|
2 |
s |
|
|
|
|
|
B |
L |
|
w |
|
, |
|
|
|
|||
|
|
|
a |
|
||||||
|
I |
|
l |
|
a |
|
|
|
H |
|
|
|
|
|
|
|
|
|
м м
,
(7.2)
U – синусоидальное напряжение с частотой f; I – действующий ток;
w – число витков катушки;
s – площадь поперечного сечения сердечника;а – магнитная проницаемость цепи; Вм – магнитная индукция; Нм – напряженность магнитного поля.
Катушки обычно питаются от источника тока высокой частоты (5 – 70 МГц).
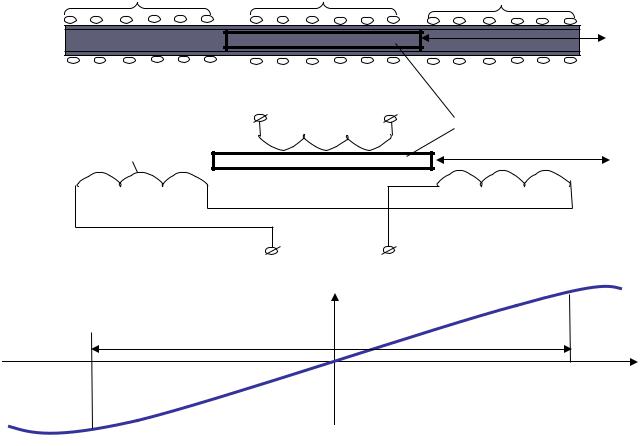
С целью повышения чувствительности, помехозащищенности и обеспечения линейности выходного сигнала применяют линейные дифференциальные трансформаторы с пределами измерений от 0,1 до 300 мм. Вторичные обмотки линейного дифференциального трансформатора включены последовательно в противофазе.
2 |
1 |
2 |
а)
|
|
Uвх |
|
1 |
3 |
|
|
|
б) |
2 |
|
|
|
2
Uвых
Uвых
в)
Линейный участок |
x |
Рис. 7.2. Линейный дифференциальный трансформатор: а) устройство; б) принципиальная электрическая схема; в) характеристика.
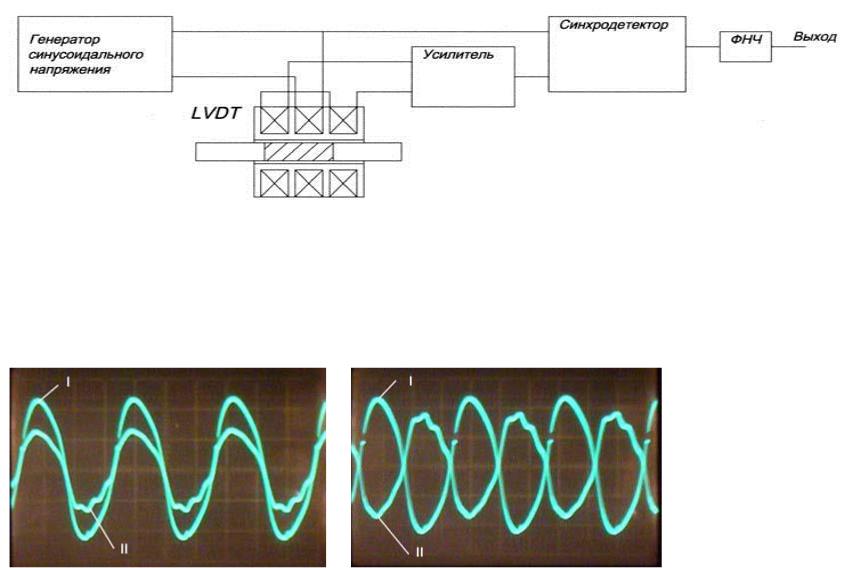
Обмотка возбуждения подключается к генератору синусоидального сигнала. Напряжение с сигнальной обмотки, амплитуда и фаза которого зависят от положения ферромагнитного сердечника по отношению к катушкам, усиливается (при необходимости) и подается на синхродетектор. Сигнал с выхода синхродетектора подается на фильтр низких частот (ФНЧ) и далее используется по назначению.
а) |
б |
Сигналы на обмотке возбуждения и сигнальной обмотке LVDT при крайних положениях ферромагнитного сердечника (I - обмотка возбуждения: 0.5 В/дел., 50 мкс/дел., II - сигнальная обмотка: 0.2 В/дел, 50 мкс/

Индуктивные датчики перемещения серии АСТ (LVDT)

7.5. Емкостные преобразователи
Принцип работы емкостного преобразователя основан на изменении
емкостного сопротивления |
1 |
|
1 |
|
||
xC |
|
|
, |
|
(7.3) |
|
|
|
|
|
|
||
|
C |
|
2 |
f C |
|
|
где = 2 – угловая частота; |
|
|
|
|
|
|
С – емкость конденсатора, С= 0 r(n-1)A/d ;
0 – диэлектрическая проницаемость вакуума;
r – диэлектрическая проницаемость диэлектрика; n – число пластин;
А – площадь одной стороны пластины; d – толщина диэлектрика.
В преобразователе емкостное сопротивление определяется емкостью конденсатора, которая изменяется при изменении расстояния между пластинами, соединенными с перемещающимися деталями объекта, (рис. 7.3 а). Такой тип преобразователи применяется для малых перемещений в пределах, до 1 мм и имеет нелинейную характеристику.