

Набор учебников PDF Хороший солдат / Физика / Физика. Механика
.pdf1.4. Ускорение |
|
|
|
|
|
|
81 |
G |
2 G |
G |
|
|
2 |
|
|
Дано: r (t) = At |
i + B sin(πt) j |
; А = 1 м/с ; В = 5 м; t = 5 с. |
|
||||
Найти: υ. |
|
|
|
|
|
|
|
Из условия задачи следует, что r (t) = At2 , r (t) = B sin(πt) , r (t) = 0, |
|||||||
|
|
|
|
x |
y |
z |
|
и, следовательно, материальная точка движется в плоскости OXY. |
|||||||
Определим проекции вектора скорости. |
|
||||||
υx = |
dx |
= 2At, |
υ y = |
dy |
= πB cos(πt) , |
|
|
dt |
dt |
|
|||||
|
|
|
|
|
|
||
Найдем модуль вектора скорости (см. 1.8.).
|
|
|
υ = υ2x |
+ υ2y = 4A2t2 + π2 B2 cos2 (πt) . |
|
|
|
|
|
Ответ: модуль вектора скорости |
|
|
|
|
|||||
υ = |
4A2t2 + π2 B2 cos2 (πt) = 18, 7 м/с. |
|
|
|
|
||||
Задача 1.2. |
|
|
|
|
|
|
|
||
Координаты двух материальных точек x (t) = A t + B t2 |
+ C t3 |
, |
|||||||
x (t) = A t + B t2 |
+ C |
t3 , |
1 |
1 |
1 |
1 |
|
||
где B1 = 4 м/c2, C1=–3 м/c3, B2= –2м/c2, C2 = 1 |
|||||||||
2 |
2 |
2 |
2 |
|
|
|
|
|
|
м/c3. Определить проекции ускорения точек на ось Х и момент вре-
мени t1, когда их ускорения равны. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Дано: x (t) = A t + B t2 + C t3 |
; |
x (t) = A t + B t2 |
+ C |
t3 ; |
B1 |
= 4 м/c2, |
|||||||||||||
|
1 |
1 |
1 |
1 |
|
2 |
|
|
|
2 |
|
2 |
2 |
|
|
|
|
||
C1 = –3 м/c3, B2= –2м/c2, C2 = 1 м/c3. |
|
|
|
|
|
|
|
|
|
|
|||||||||
Найти: t1 , a1x (t1 ), |
a2 x (t1 ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
По формуле (1.11) находим ускорения |
|
|
|
|
|
|
|
|
|||||||||||
a |
(t) = |
d 2 x |
= 2B + 6C t, |
a |
|
(t) = |
|
d 2 x |
|
= 2B + 6C |
t. |
|
|||||||
1 |
|
|
|
2 |
|
(1) |
|||||||||||||
dt2 |
|
|
|
dt2 |
|
||||||||||||||
1x |
|
1 |
|
1 |
|
2 x |
|
|
|
|
|
|
2 |
|
2 |
|
|
||
В момент времени t1 по условию задачи a1x (t1 ) = a2 x (t1 ), |
|
||||||||||||||||||
|
|
|
2B1 + 6C1t1 = 2B2 + 6C2t1. |
|
|
|
|
|
|
|
|||||||||
Из последнего равенства находим |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
t |
= |
B1 − B2 |
. |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
1 |
|
3(C2 − C1 ) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Из уравнений (1) определим ускорение точек в момент време-
ни t1 |
|
|
|
C (B − B ) |
||
a1x (t) = a2 x (t) = 2B1 |
+ 6C1t1. = 2 |
|
||||
B1 |
+ |
1 1 |
2 |
. |
||
C2 − C1 |
|
|||||
|
|
|
|
|
|
|
82 |
|
|
|
|
|
Глава 1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ |
|||||
Ответ: |
|
|
|
|
|
|
|
|
|
|
|
t = |
B1 − B2 |
= 0, |
5 c; a |
= a |
= 2 |
B |
+ |
C1 (B1 − B2 ) |
|
= −1 м/с2. |
|
|
|
||||||||||
1 |
3(C2 |
− C1 ) |
|
1x |
2 x |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
C2 − C1 |
|
|||
Задача 1.3.
Точка движется по окружности радиусом R = 3 м по закону s = = At 2 + Bt, где A = 0,4 м/с2, B = 0,1 м/с2. Определить для момента времени t = 1 c послеGначала движения модули векторов нормального aGn , касательного aτ и полного aG ускорений.
Дано: s = At 2 + Bt; A = 0,4 м/с2, B = 0,1 м/с2, R = 3 м, t = 1 c.
Найти: aτ , an , a.
Модуль скорости (см. 1.6.)
|
|
υ (t) = |
dS (t) |
= 2At + B . |
|||||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
Модуль вектора касательного ускорения |
|
|
|||||||||||||||
|
|
|
|
aτ = |
dυ(t) |
= 2A . |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
Модуль вектора нормального ускорения |
|
|
|
||||||||||||||
|
|
an |
= |
υ2 (t) |
= |
|
(2At + B)2 |
|
. |
|
|||||||
|
|
|
R |
|
|
R |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Модуль полного ускорения |
|
|
|
|
|
|
|
|
|
||||||||
|
|
a = a2 |
+ a |
2 = 4A2 + |
2( At + B)4 |
. |
|||||||||||
|
|
|
|
||||||||||||||
|
|
τ |
|
n |
|
|
|
|
R2 |
||||||||
Ответ: aτ = 2A = 0,8 м/с2, an |
= |
(2At + B)2 |
|
= 0, 27 м/с2, |
|||||||||||||
|
|
R |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
a = |
4A2 + |
2( At + B)4 |
|
= 0,84 |
м/с2. |
|
|
|
|||||||||
R2 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1.5. КИНЕМАТИКА РАВНОМЕРНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
Движение называется равномерным и прямолинейным,G если точка движется по прямой линии с постоянной скоростью υ .
Рассмотрим движение материальной точки с постоянной скоростью. Пусть в начальныйG момент времени t = 0, координата точки х = х0, а скорость υ совпадает с направлением оси Ох (рис. 1.8).

1.6. Кинематика равнопеременного прямолинейного движения |
|
|
83 |
||||||
Найдем координату х и путь s, |
|
|
|
G |
|
G |
Х |
||
пройденный точкой за интервал вре- |
|
|
|
υ |
|
υ |
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
мени t. Воспользуемся определением |
|
|
|
|
|
|
|
||
0 |
x0 |
s x |
|
||||||
скорости υx = |
dx |
|
|
||||||
и запишем переме- |
|
|
|
|
Рис. 1.8 |
|
|||
dt
щение точки по оси OХ за малый интервал dt.
dx = υx dt ,
G
где υx — проекция вектора скорости υ на ось ОХ. Проинтегрируем левую и правую часть последнего равенства в
пределах изменения переменных x и t
∫x dx = ∫t υx dt ,
x0 0
x − x0 = υxt ,
x= x0 + υxt .
Вобщем случае с учетом того, что движение возможно и против
оси OХ
x = x0 ± υt .
При прямолинейном равномерном движении пройденный точкой путь s равен модулю ее перемещения
s = x − x0 = υt .
1.6.КИНЕМАТИКА РАВНОПЕРЕМЕННОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
Движение называется равнопеременным и прямолинейным,G если тело перемещается по прямой линии с постоянным ускорением a . Равнопеременное прямолинейное движение может быть равноускоренным, когда вектор ускорения совпадает с вектором мгновенной скорости (рис. 1.9а) и равнозамедленным, когда ему противоположен (рис. 1.9б).
ПустьG в начальный момент времени координата точки x = х0, скорость υ0 совпадает с направлением оси ОХ.

84 |
Глава 1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ |
|
|
|
a |
|
|
a |
|
Для определения коор- |
|
|
|
|
|
|
|
|
динаты x и пути пройден- |
|
υ0 |
υ |
|
υ0 |
υ |
|
ного точкой с момента на- |
|
0 |
x0 |
|
x |
X |
0 x0 |
x |
X |
чала ее движения спроек- |
|
|
|
а) |
|
|
б) |
|
тируем векторы скорости и |
|
|
|
|
Рис. 1.10 |
|
|
ускорения на ось OХ. При |
|
|
|
|
|
|
|
|
|
равноускоренном движе- |
нии ax |
= a , υ0 x |
= υ0 , а равнозамедленном ax = −a υ0 x = υ0 , где υ0 , a — |
||||||
модули векторов начальной скорости и ускорения. Путь, пройденный точкой за время t
s = ∫t |
|
υx |
|
dt , |
(1.19) |
|
|
||||
0 |
|
|
|
|
|
где |
|
υx |
|
— модуль проекции вектора скорости на ось OХ находится |
|
|
|
||||
из |
|
соотношения dυx = ax dt |
(см. 1.11) интегрированием его левой и |
||
правой части в пределах изменения переменных υx и t |
|||||
|
|
|
|
υx |
t |
|
|
|
|
∫ |
dυx = ∫ ax dt, |
|
|
|
|
υox |
0 |
υx − υ0 x = axt ,
υx = υ0 x + axt .
Подставим в соотношение (1.19) значение скорости υx для равноускоренного движения и учтем, что ах = а, υ0 x = υ0
s = |
|
x − x0 |
|
= ∫t |
(υ0 + a t)dt = |
υ0t + |
a t2 |
, |
|||
|
|
||||||||||
|
|
|
|||||||||
0 |
|
|
|
|
2 |
|
|||||
где |
|
|
|
a t2 |
|
|
|
||||
|
|
|
|
x = x |
+ υ |
t + |
. |
|
(1.20) |
||
|
|
|
|
|
|
||||||
|
|
|
|
|
0 |
0 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для равнозамедленного движения проекция скорости υ на ось ОХ
икоордината точки определяются по следующим формулам:
υx = υ0 − axt ,
x = x |
+ υ |
t − |
at2 |
. |
(1.21) |
|
|||||
0 |
0 |
|
2 |
|
|
|
|
|
|
|
1.7. Кинематика равнопеременного движения |
|
|
|
|
85 |
|||||||
Путь |
|
x |
|
|
при t < υ0 , |
|
|
|||||
|
|
|
− x |
|
|
|
||||||
|
|
|
|
|
0 |
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
s = |
|
|
|
|
|
|
при t > υ0 |
|
|
|
|
|
(x − x |
) + x − x |
|
, |
||||||
|
|
2 |
|
1 |
0 |
|
1 |
|
a |
|
||
где x |
= x + υ0 . |
|
|
|
|
|
|
|
|
|
||
1 |
0 |
2a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.7. КИНЕМАТИКА РАВНОПЕРЕМЕННОГО ДВИЖЕНИЯ |
||||||||||
Движение называется |
|
Y |
|
|
|
|
|
|||||
равнопеременным, если тело |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
перемещается с постоянным |
|
|
|
|
|
|
υ0x |
|||||
вектором ускорения. |
|
|
|
|
|
|
|
|
||||
|
|
|
υ0y |
υ0 |
|
an |
||||||
Примером равнопере- |
|
|
υy α ax |
|||||||||
|
|
|
|
|
|
|||||||
менного движения являет- |
|
|
|
|
|
|
υ |
|||||
ся движение тела, брошен- |
|
|
|
|
|
|
||||||
|
i |
|
φ |
|
g |
|||||||
ного со скоростью υ0 под |
|
|
|
|||||||||
|
|
j |
|
υ0x |
|
X |
||||||
углом ϕ к горизонту. |
|
|
|
|
|
Рис. 1.10 |
||||||
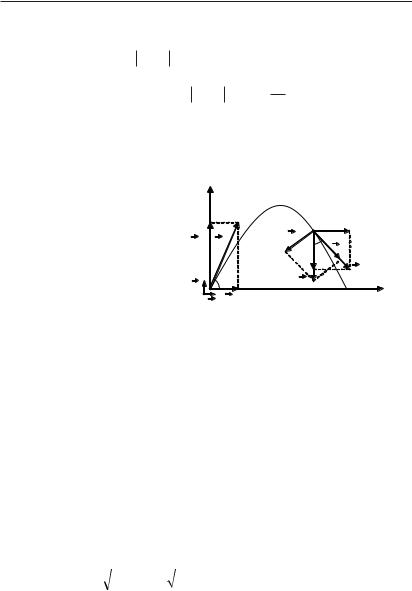
Движение тела происхо- |
|
|
|
|
|
|||||||
дит в гравитационном поле G
Земли с постоянным ускорением свободного падения g . Для определения положения тела в пространстве разложим его движение на равномерное прямолинейное по оси OХ со скоростью υ0 x = υ0 cos ϕ и равнопеременное по оси OY с ускорением свободного падения g и
начальной скоростью υ0 y |
= υ0 sin ϕ . |
|
|
|
|
||
В момент времени t координаты тела |
|
|
|
||||
|
x = υ0t cos ϕ, |
|
|
|
|
||
|
|
|
|
gt |
|
|
(1.22) |
|
|
|
|
2 |
|
||
|
y = υ0t sin ϕ − |
|
|
, |
|
||
|
G2 |
|
|
||||
|
|
G |
G |
|
|
|
|
вектор скорости |
|
υ = υx i + υ y |
j , |
|
|
(1.23) |
|
модуль вектора скорости |
|
|
|
|
|
|
|
υ = |
υ2x + υ2y |
= |
υ02 cos2 ϕ + (υ0 sin ϕ − gt)2 , |
(1.24) |
|||
где υx = υ0 cos ϕ, |
υ y = υ0 sin ϕ − gt . |
|
|
|
|
||

86 Глава 1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Уравнение траектории найдем путем исключения параметра t из
равенств (1.22) |
|
|
|
y = x tgϕ − |
gx2 |
|
|
|
. |
(1.25) |
|
2υ02 cos2 ϕ |
|||
Вектор ускорения свободного падения в любой точке траектории можно разложить на его касательную аτ и нормальную аn составляю-
щие (рис. 1.10.). |
|
|
|
|
|
|
|
Модуль касательного ускорения |
|
|
|
||||
aτ = g cos α = g |
υ y |
= |
|
g (υ0 sin ϕ − gt) |
|
||
|
|
|
|
, |
(1.26) |
||
|
|
υ02 cos2 ϕ + (υ0 |
|
||||
|
υ |
|
|
sin ϕ − gt)2 |
G |
||
|
|
|
|
G |
|
|
|
где α — угол между векторами скорости υ |
и ускорения g в задан- |
||||||
ной точке траектории. |
|
|
|
|
|
|
|
Модуль нормального ускорения |
|
|
|
||||
|
an = |
g2 − aτ2 . |
|
|
(1.27) |
||
Из сравнения уравнения параболы y(x) = ax2 + bx + c и равенства (1.25) следует, что тело, брошенное под углом к горизонту, движется по параболе.
1.8. КИНЕМАТИКА РАВНОМЕРНОГО ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Z |
|
|
Рассмотрим движение м. т. по окруж- |
|
|
ности радиусом R с постоянной линейной |
|
G |
|
|
|
|
|
скоростью υ вокруг неподвижной оси Z |
|
ω |
|
|
(рис. 1.11). |
G |
|
|
|
dφ |
R |
|
Положение точки зададим радиус-век- |
R dφ |
G |
G |
тором rG , исходящим из точки О оси Z. За |
|
dr |
малый интервал времени dt точка совер- |
|
G |
G |
υ |
|
|
|
Gм. т.
βбудем характеризовать вектором dϕ и оп-r r dϕ
0
Рис. 1.11
ределим его направление правилом правого винта (если вращать правый винт по направлению движения точки, то поступательное движение винта совпадает

1.8. Кинематика равномерного вращательного движения |
87 |
GG
свектором dϕ ). Модуль вектора dϕ равен углу поворотаG точки за интервал времени dt . Линейное перемещение вектора r за время dt равно
dr = Rdϕ = r sin βdϕ , |
G |
|
||
|
G |
и вектором |
R = r sin β . |
|
где β — угол между вектором r |
dϕ , |
|||
Вектор перемещения |
|
|
|
|
G |
|
G G |
|
(1.28) |
dr |
= [dϕ r ] . |
|
||
Последнее равенство справедливо для бесконечно малого угла dϕ.
Вектор линейной скорости движения точки |
|
||||||||
|
|
|
G |
G |
|
G |
G |
GG |
|
|
|
|
dr |
dϕ |
|
||||
|
|
|
υ = |
|
= |
|
r = |
[ωr ], |
(1.29) |
|
|
|
|
|
|||||
G |
|
G |
|
dt |
dt |
|
|
|
|
|
dϕ |
|
|
|
|
|
|
|
|
где ω = |
|
— вектор угловой скорости. |
|
|
|||||
dt |
|
|
|||||||
|
|
|
|
G |
|
|
|
||
Вектор угловой скорости ω совпадает с направлением вектора |
|||||||||
G |
G |
|
G |
|
|
|
|
|
|
dϕ ) (ω ↑↑ dϕ) . |
|
|
|
|
|
|
|||
Согласно правилу векторного умножения векторов модуль векто-
ра линейной скорости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
υ = ω r sin β = ω R . |
|
|
|
(1.30) |
||||||||||||
Вектор линейного ускорения |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
G |
|
G |
|
|
d |
G G |
|
|
|
|
G |
G G |
|
G |
|
G |
|
|
G |
|
|
G G |
G G |
|||
dυ |
|
|
|
dω |
|
dr |
|
|
|
|
||||||||||||||||
a = |
|
|
= |
|
[ω r |
] = |
|
|
|
|
r |
+ ω |
|
|
= [ε |
r ]+ [ω υ] = aτ + an , (1.31) |
||||||||||
dt |
dt |
|
|
|
dt |
|||||||||||||||||||||
|
G |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
где εG = |
dω |
|
— вектор углового ускорения, aGτ |
|
|
= [εG rG] |
— вектор каса- |
|||||||||||||||||||
dt |
||||||||||||||||||||||||||
|
|
|
|
|
|
G |
G |
G |
|
|
|
|
|
|
|
|
|
|
|
|||||||
тельного ускорения, an = |
[ω υ] — вектор нормального ускорения. |
|||||||||||||||||||||||||
Направление вектора углового ускорения |
|
|
εG совпадает с направ- |
|||||||||||||||||||||||
|
|
|
|
|
|
G |
G |
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
||
лением вектораGω |
( εG |
↑↑ ω ), если угловая скорость возрастает, и про- |
||||||||||||||||||||||||
тивоположно ( ε ↑↓ ω ), если она уменьшается. |
|
|||||||||||||||||||||||||
Модули векторов |
|
aGτ |
|
= ε r sin β = ε R , |
|
|
aGn |
|
|
= ω2 R . |
|
|||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
Модуль полного |
ускорения |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
a = |
aτ2 + an2 |
= R |
|
ε2 + ω4 |
. |
(1.32) |
||||||||||||
Угловой путь м. т., движущейся по окружности за время dt
88 |
Глава 1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ |
dϕ = ωdt .
Интегрируя последнее равенство в пределах изменения угла и времени, найдем угловой путь (ϕ − ϕ0 ) точки за интервал времени t при начальном угле ϕ0
ϕ |
t |
∫ dϕ = ∫ωdt, |
|
ϕ0 |
0 |
ϕ − ϕ0 = ∫t ωdt .
0
При постоянной угловой скорости ω угловой путь и угол поворота определятся из равенств
ϕ − ϕ0 = ωt ,
ϕ = ϕ0 + ωt . |
(1.33) |
При равноускоренном вращении точки по окружности для t = 0, ω(t = 0) = ω0 ε = const , угловая скорость определяется из соотноше-
ния
ω = ω0 + εt ,
которое получается интегрированием равенства dω = εdt в пределах изменения угловой скорости и времени
ωt
∫dω = ∫ εdt ,
ω0 |
0 |
ω − ω0 = εt .
Для равноускоренного вращения за время t угловой путь и угол поворота определяются из соотношений
dϕ = ωdt ,
dϕ = (ω0 + εt)dt ,
ϕ |
t |
|
|
|
∫ dϕ = ∫(ω0 + εt)dt , |
||||
ϕ0 |
0 |
|
|
|
ϕ − ϕ0 |
= ω0t + |
εt2 |
, |
|
2 |
||||
|
|
|
||
1.8. Кинематика равномерного вращательного движения |
|
89 |
|||
ϕ = ϕ0 |
+ ω0t + |
εt2 |
. |
(1.34) |
|
2 |
|||||
Для равнозамедленного вращения |
|
|
|||
|
|
|
|||
ω = ω0 − εt , |
|
|
|||
ϕ − ϕ0 |
= ω0t − |
εt2 |
, |
(1.35) |
|
2 |
|||||
|
|
|
|
||
ϕ = ϕ0 |
+ ω0t − |
εt2 |
. |
|
|
2 |
|
||||
|
|
|
|
||
Согласно определению угловая скорость измеряется в рад/с, угловое ускорение — рад/с2.
Примеры решения задач
Задача 1.4.
Материальная точка движется без начальной скорости υ0 = 0 вдоль прямой с ускорением a = k t , где k = const. Определить в момент времени t1 = 10 c скорость точки υ1 и пройденный ею путь s1, если известно, что за это время ускорение достигает значения a1 = 5 м/с2.
Дано: υ0 = 0 ; t1=10 c; а1=5 м/с2. Найти: υ1, s1.
Движение материальной точки ускоренное и прямолинейное. Из
определения ускорения a = |
dυ |
|
|
найдем скорость в момент време- |
|||||||||||||||||||
dt |
|
|
|||||||||||||||||||||
ни t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
t1 |
|
|
|
t1 |
|
|
|
|
|
kt2 |
|
|
|
a t |
|
|
|||
|
|
|
|
υ1 = ∫ a(t)dt = ∫ ktdt = |
|
1 |
|
= |
1 1 |
, |
(1) |
||||||||||||
|
|
|
|
2 |
|
2 |
|
||||||||||||||||
|
a1 |
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||||
где k = |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пройденный точкой путь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
t1 |
|
t1 |
kt2 |
|
|
|
kt3 |
|
|
a t2 |
|
|
|||||||
|
|
|
|
s = ∫ υdt = |
|
∫ |
|
|
|
|
dt = |
|
1 |
|
= |
|
1 1 |
. |
|
(2) |
|||
|
|
|
|
|
2 |
|
|
6 |
|
|
6 |
|
|||||||||||
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
Ответ: υ = |
a t |
= 25 м/с, |
s = |
|
a t2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 1 |
|
|
1 1 |
= 83,3 м. |
|
|
|||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
1 |
2 |
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
90 Глава 1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
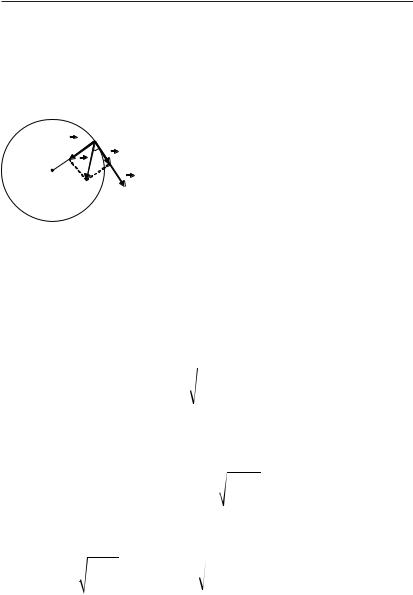
Задача 1.5.
Материальная точка начинает движение по окружности радиусом
R = 29 см с постоянным касательным ускорением aτ = 0, 5 м/с2. Опре- |
||||||||||||||||||||||||||||||||||||||||||
делить пройденный путь s, угловую скорость ω, угловое ускорение ε |
||||||||||||||||||||||||||||||||||||||||||
и время t, при котором вектор ускорения aG |
|
|
образует с вектором ско- |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рости υ угол α = 30°. |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
an |
|
|
|
|
|
|
|
Дано: R = 29 см = 0,29 м; aτ = 0,5 м/с2; |
||||||||||||||||||||||||||||||||
R |
|
|
|
aτ |
α = 30°; υ0 |
= 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
a α |
|
|
|
Найти: t, s, ω, ε. |
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
υ |
|
Из определения касательного ускорения |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
aτ |
|
= |
dυ |
|
найдем скорость точки |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υ = ∫ aτ dt = aτ t . |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||
Нормальное ускорение в момент времени t |
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
an |
= |
|
υ2 |
= |
|
aτ |
2t2 |
|
. |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
R |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Укажем на рисунке направление векторов aGτ , aGn , aG , угол α, и |
||||||||||||||||||||||||||||||||||||||||||
найдем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
tgα = |
|
a |
n |
|
= |
a 2t2 |
|
= |
|
|
|
a |
t2 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
τ |
|
|
|
, |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
aτ |
R aτ |
|
|
|
R |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
t = |
|
|
Rtgα |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Путь, пройденный точкой (см. 1.6) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aτ t2 |
|
|
|
|
Rtgα |
|
|
|
|
|||||||||
|
|
|
|
|
s = ∫ υdt = |
∫ aτ tdt = |
|
|
|
|
|
|
|
|
|
= |
|
|
|
. |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|||||||||||||||||||||||||||||
Угловая скорость 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
υ |
|
|
|
|
|
aτ t |
|
|
|
|
|
|
aτ tgα |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
ω = |
|
|
= |
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
R |
R |
|
|
|
|
|
|
R |
|
|
|
|
|||||||||||||||||||||||
Угловое ускорение |
|
dω |
|
|
|
d |
|
|
υ |
|
|
|
|
|
|
aτ |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
ε = |
|
= |
|
|
= |
|
|
. |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
dt |
|
dt R |
|
|
|
|
R |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Ответ: t = |
|
Rtgα |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aτ tgα |
|
|
|
|
|
|
|
|
aτ |
2 |
|||||||||||||||
|
|
|
|
= 0,58 c, |
ω = |
|
|
|
|
|
|
|
|
= 1 |
рад/с, ε = |
|
= 1, 73 |
рад/с , |
||||||||||||||||||||||||
|
aτ |
|
|
|
|
|
|
|
|
R |
|
R |
||||||||||||||||||||||||||||||
s = |
aτ Rtgα |
= 0, 43 м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||