

Устойчивое и неустойчивое состояние системы
Устойчивым состоянием – называется такое состояние системы, когда сравнительно малые внешние воздействия приводят к малым последствиям.
 мяч в яме
мяч в яме
Неустойчивое состояние – это когда малые воздействия приводят к достаточно большим последствиям.

мяч на бугре
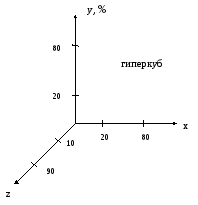
x– число вагонов в парке приема;
y– число вагонов в сортировочном парке;
z– число вагонов в парке отправления.
Допускается, что система работает в равномерном устойчивом режиме.
УСТОЙЧИВОЕ СОСТОЯНИЕ СИСТЕМЫ ХАРАКТЕРИЗУЕТСЯ:
Нормативной пропускной способностью всех каналов системы.
Канал – это технические устройства и операции, которые производят обработку потока в системе.
Каналом на СС являются:
- обработка по прибытию;
- расформирование;
- накопление и др.
Vi│yi (t0) ≥yi*
yi (t0) – пропускная способность канала в момент времениt0;
yi*– нормативная пропускная способность.
Каналы должны иметь нормативное заполнение:
Vi│li (t0) ≈li*
li*– нормативное заполнение;
li (t0) – текущее заполнение канала.
На выходных участках системы должно быть достаточное число свободных путей для поглощения всплеска потоков (бункер).
Vi│ (Qi -qi (t0)) ≥ ∆qi*
Qi – предельная вместимость бункера;
qi (t0) – текущее заполнение бункера;
∆qi* – нормативная, свободная часть бункера.
ВЫВОД: транспортная система находится в устойчивом состоянии если бункер на выходе имеет резервные пути.
На выходных участках системы должно быть достаточное количество вагонов для порождения всплеска потоков.
Vi│qj (t0) ≥ ∆qj*
qj*– достаточное число вагонов для порождения всплесков потоков;
qj (t0) – текущее число вагонов.
Условие устойчивой работы ТС:
S*= ({yj*}, {lj*}, {∆qi*}, {∆qj*})
Лекция 3 виды управления т.С.
Если состояние системы выходит за пределы программно-устойчивого состояния, то требуется управление для возвращения системы в устойчивое состояние.
Существуют следующие виды управления:
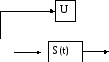
Управление по алгоритму.
 U
U
ω(t) y(t)
ω(t) – возмущающие воздействия внешней среды;
S(t) – состояние системы (набор внутренних параметров);
y(t) – выход системы (набор выходных параметров);
U– управление.
Управление по этому методу возможно, если известны возмущающие воздействия, их влияние на состояние системы и выходных параметров системы.
Управление по возмущению.
 =f(ω(t))
=f(ω(t))
ω(t)y(t)
Оно реализуется тогда, когда мы не знаем заранее когда будет влияние воздействия, но знаем, как оно влияет на состояние системы, а значит влияет на выходные параметры.
В этом случае мы строим управление не по заранее известному алгоритму, а по алгоритму, зависящему от возмущающего воздействия.
Управление с обратной связью.
Возмущающее воздействие окружающей среды заранее известно, но при этом недостаточно известно влияние возмущ. возд. на внутренние параметры системы и недостаточно известно влияние на выходные параметры.
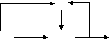 U(t)
U(t)
ω(t)S(t)y(t)
Диспетчер при таком управлении должен контролировать не только внешние возмущающие воздействия, но и выходные параметры системы.
Управление, так или иначе, реагирует на отклонение некоторых параметров:
- внешнего воздействия;
- выходного параметра.
1. При этом, реакция системы может быть:
- на абсолютное значение отклонения, в этом случае мы имеем дело с управлением по отклонению:
U=f(∆ω (t));U=f(∆y (t)).
2. Для некоторых объектов свойственно такое качество, что при малом отклонении каждое воздействие имеет малую величину (направленную на повышение пространства на ст.) в этом случае стратегия управления по интеграции:
U=f(∫ω (t)dt)
Все возмущающие воздействия приводят к отклонению всех параметров и в этом случае строить управление нужно не по учету отдельных возмущ. возд., а учитывать интеграл.
3. Управление по дифференциалу (упреждающее).
О тклонение
еще маленькое и до выхода из устойчивого
состояния еще далеко, но скорость
изменения воздействия велика. В этом
случае мы должны реагировать на скорость
изменения параметра, иначе через
некоторое время абсолютное значение
параметра изменится на недостижимую
величину:
тклонение
еще маленькое и до выхода из устойчивого
состояния еще далеко, но скорость
изменения воздействия велика. В этом
случае мы должны реагировать на скорость
изменения параметра, иначе через
некоторое время абсолютное значение
параметра изменится на недостижимую
величину:
U=f