

teorija_mehanizmov_i_mashin_belanov_savenkov
.pdf61
Рисунок 3.7 – Заміна Fi і Мi силою Fi в точці К при обертальному русі ланки
При обертальному русі ця сила проходить через центр качання К (рис. 3.7). Відстань між центром мас і центром качання знаходиться за формулою:
|
|
|
|
|
|
|
lSK |
= |
IS |
|
, |
(3.3) |
||||
|
|
|
|
|
|
|
mlOS |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
яка виходить із виразу для плеча h після підстановки Мi |
і Fi з урахуванням |
|||||||||||||||
формул кінематики еS = aS |
sin д |
; |
h = lSK sin д. І дійсно: |
|
||||||||||||
|
|
|||||||||||||||
|
|
|
lOS |
|
|
|
|
|
|
|
|
|
|
|
|
|
h = |
M i |
= |
IS еS |
= |
|
IS sin д aS |
|
= lSK sin д, |
|
|||||||
|
maS |
|
|
|
|
|||||||||||
|
Fi |
|
|
|
|
|
|
maS |
|
|
|
|||||
|
|
|
|
|
lSK |
= |
|
IS |
. |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
mS lOS |
|
|
|
||||
§ 3.1.2. Умова статичної визначеності кінематичного ланцюга
Число невідомих, які визначаються за будь-якої системи рівнянь, повинно співпадати з числом рівнянь. Через це, перш ніж розв’язувати задачу про визначення реакцій в кінематичних парах, необхідно з’ясувати, для яких кінематичних ланцюгів дотримується умова рівності числа рівнянь статики (кінетостатики) числу невідомих складових реакцій в кінематичних парах (умова статичної визначеності). Звичайно, в першому наближенні, кінетостатичний аналіз виконується без урахування сил тертя.
Розглянемо, як будуть направлені реакції в різних кінематичних парах плоских механізмів.
62
Рисунок 3.8 – Реакції в плоских кінематичних парах
Нехтуючи тертям, можна вважати, що в обертальній парі (рис. 3.8, а) 5-
го класу сила Rr12 тиску ланки 2 на ланку 1 проходить через центр А шарніра.
Модуль і напрямок цього вектора залежать від значення і напрямку сил, прикладених до ланок пари. В поступальній парі (рис. 3.8, б) 5-го класу сила
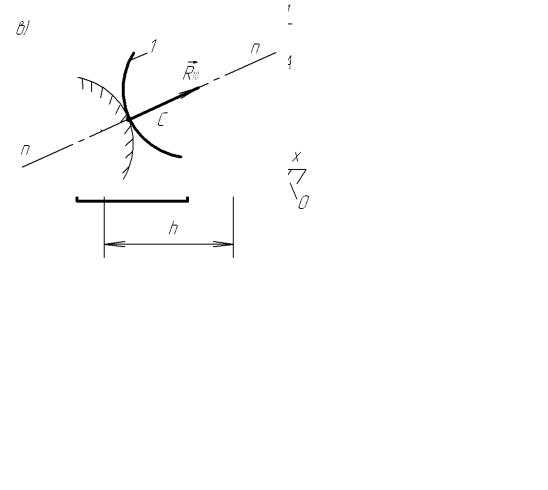
Rr10 (тиск ланки О на ланку 1) перпендикулярна до напрямної «х-х», тобто відома лінія її дії, але невідомі напрямок, модуль і точка прикладення (відстань h). У вищій парі 4-го класу без тертя (рис. 3.8, в) реакція Rr10 прикладена до
ланки 1 в точці С контакту і направлена по спільній нормалі «n-n» дотичних поверхонь.
Таким чином, для визначення реакцій в кожній нижчій парі 5-го класу необхідно знайти по дві невідомі скалярні величини, а у вищій 4-го класу – тільки одну.
Позначимо число рухомих ланок плоского кінематичного ланцюга через n, число пар 5-го класу – через число р5 і число пар 4-го класу – р4. Складемо умову статичної визначеності плоского кінематичного ланцюга. Оскільки для кожної ланки, яка має плоско-паралельний рух, можна написати три рівняння рівноваги, то число рівнянь, яке ми зможемо скласти при n ланках, буде дорівнювати 3n. Число невідомих, яке необхідно визначити, буде
63
дорівнювати для пар 5-го класу 2р5 і для пар 4-го класу р4. Отже, кінематичний ланцюг буде статично визначеним, якщо виконується умова:
3n = 2 p5 + p4 . |
(3.4) |
Як відомо, будь-який механізм з парами 4-го і 5-го класів може бути заміненим механізмом з парами 5-го класу. Через це для розгляду загального випадку достатньо обмежитися розглядом груп, ланки яких входять тільки в пари 5-го класу.
Групи з парами 4-го класу можуть бути приведеними до груп з парами 5-го класу і можуть бути розраховані тими ж методами. Тоді формула (3.4) може бути написана так:
3n = 2 p5 . |
(3.5) |
Звідки |
p5 |
= |
3 |
n . |
|
2 |
|||||
|
|
|
|
Таким чином, число ланок і пар зв’язані між собою відношенням (3.5). Оскільки числа n і р5 повинні бути цілими, то цьому співвідношенню задовольняють наступні ряди чисел ланок і кінематичних пар
n = 2 → p5 = 3 - група II класу
n = 4 → p5 = 6 - група III класу і т.д.
Таким чином, статично визначеними є кінематичні ланцюги, які називаються групами.
І ще про одне. При кінематичному дослідженні механізмів послідовність дослідження співпадає з послідовністю приєднання груп, тобто спочатку розглядається група, яка приєднується до початкової ланки, або початкової ланки і стійки. Потім розглядується наступна група і т.д. Послідовність силового розрахунку є протилежним послідовності кінематичного дослідження, тобто силовий розрахунок починається з останньої (рахуючи від початкової ланки) приєднаної групи і закінчується силовим розрахунком початкової ланки.
§ 3.1.3. Визначення реакцій в кінематичних парах
Враховуючи статичну визначеність структурних груп, тиск ланки на ланку визначають окремо для кожної структурної групи, а потім для ведучих ланок. Як уже сказано, розрахунки починають для групи, приєднаної до механізму останньою. При виділенні із механізму структурної групи дію відкинутої її частини замінюють відповідною силою. Ці сили належить визначити.
64
Графічне визначення реакцій в кінематичних парах плоских механізмів за допомогою планів сил застосовується не тільки через наглядність, але і тому, що зовнішні сили, які діють на ланки механізму, звичайно відомі тільки дуже приблизними, а тому точність простіших графічних будувань часто виявляється сповна достатньою.
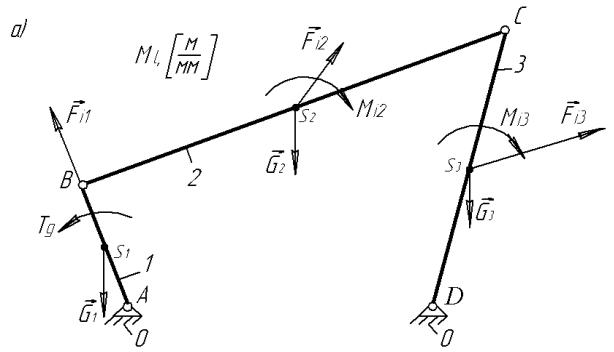
Побудову планів сил покажемо на прикладі визначення реакцій в кінематичних парах шарнірного чотирьохланкового механізму без урахування сил тертя (рис. 3.9, а). Припустимо, що за заданим законом руху початкової ланки 1 виконаний кінематичний аналіз і визначені сили і пари сил інерції:
Frij (j =1,2,3), |
Mij (j =1,2,3). |
Розв’язання задачі почнемо з розгляду умов рівноваги двохланкової групи, утвореною ланками 2 і 3 (рис. 3.9, б). Підлягають визначенню реакції
Rr21 , Rr30 , Rr23 = −Rr32 , тобто три вектора, або шість скалярних величин. В даному
прикладі система рівнянь для визначення невідомих реакцій розділяється на два скалярних рівняння, кожне із яких утримує одну невідому величину, і два векторних рівняння, які розв’язуються незалежно. Відповідно, все розв’язання складається із трьох етапів.
65
66
Рисунок 3.9 – Плани сил для двохповідкової групи та початкової ланки
r r
Перший етап – визначення тангенціальних складових Rt і Rt . Кожну
21 30
r
із реакцій R21 і R30 розкладуємо на дві складові: нормальні складові R21n і R30n
направлені по відрізкам ВС і СD, а тангенціальні складові R21t і R30t ,
перпендикулярні їм. Напрямок цих складових (знак) вибираємо довільно. Складаючи рівняння моментів відносно точки С для ланки 2 і для ланки 3,
одержуємо два рівняння, лінійних відносно шуканих величин R21t і R30t :
|
|
|
|
|
|
|
|
|
Rt |
h t |
+G h −M |
i2 |
− F h = 0; |
||
|
|
|
|
|
|
|
|
|
21 |
|
R21 |
2 G2 |
i2 Fi 2 |
||
|
|
|
|
|
|
|
|
|
-Rt |
|
h t |
+G h −M |
i3 |
− F h = 0, |
|
|
|
|
|
|
|
|
|
|
30 |
R |
3 G3 |
|
i3 Fi 3 |
||
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
де |
h |
t |
,hG |
,hF |
,h |
t |
,hG |
,hF |
- плечі відповідних сил, які є в позначенні цих плечей |
||||||
|
R |
21 |
2 |
i 2 |
R |
|
3 |
i 3 |
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
||
відносно точки С. Якщо після рішення рівнянь будь-яка складова вийшла зі знаком «плюс», то на схемі (рис. 3.9, б) знак її напрямку був вибраний правильно, а якщо зі знаком «мінус» - знак напрямку необхідно змінити на протилежний. r
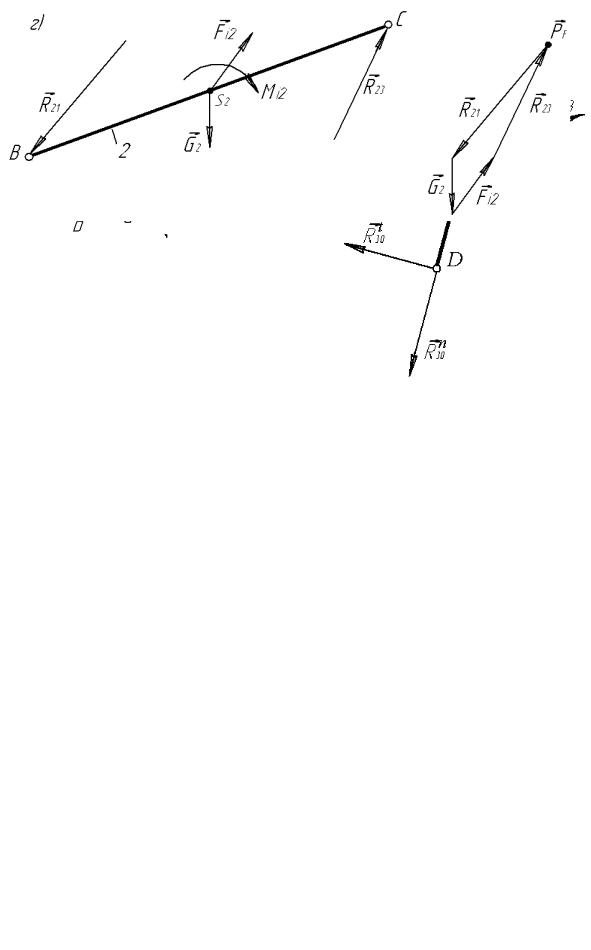
Другий етап – визначення нормальних складових R21n і R30n -
виконується на підставі графічного розв’язання векторного рівняння суми сил, діючих на всю групу в цілому:
R21n + R21t +G2 + Fi2 +G3 + Fi3 + R30t + R30n = 0 |
(3.6) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
67
Сума вказаних векторів утворює замкнутий векторний контур, який називається планом сил.
|
|
Н |
|
|
Вибравши масштабний коефіцієнт |
мF |
|
|
, відкладаємо на плані сил |
|
||||
|
|
мм |
|
|
(рис. 3.9, в) вектори, які їх зображають, а модулі їх дорівнюють, наприклад,
(ab)= |
G2 |
; |
bc = |
Fi2 |
і т.д. При цьому R21t необхідно відкладати поряд з G2 , а |
|
|
||||
Rr30t - з |
мF |
|
мF |
||
Fri3 . Лінії дії векторів Rr21n і R30n проводимо із початку векторів Rr21t і R30t |
|||||
відповідно. Точку перетину цих ліній визначають відрізки nf і mf, які r r
зображають R21n і R30n відповідно. Суми нормальних і тангенціальних складових дають повні реакції R21 і Rr30 .
Третій етап – визначення реакції R23 = −R32 . Ця реакція визначається за
умови рівноваги ланки 2, або ланки 3. Наприклад, для ланки 2 маємо наступне векторне рівняння (рис. 3.9, г):
Rr21 +G2 + Fi2 + R23 = 0 .
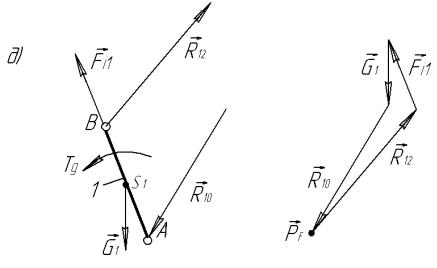
Кінетостатичне дослідження механізму закінчується силовим розрахунком ведучої ланки АВ. Оскільки до ланки прикладений обертовий момент Тg (рис. 3.9, д), то його значення визначаємо за умови:
∑mA (Fi )= 0, Tg -R12hR |
+G1hG = 0, |
звідкиTg = R12 hR |
−G1hG . |
12 |
1 |
12 |
1 |
Реакцію в кінематичній парі А знаходимо за векторним рівнянням (рис.
3.9, д):
R12 +G1 + Fi1 + R10 = 0.
§ 3.1.4. Теорема Жуковського
Розглянемо ланку механізму, абсолютні швидкості хА і хВ точок А і В якого відомі; до ланки в точці С прикладена сила Fj (рис. 3.10, а).
План швидкостей точок цієї ланки побудований на рис. 3.10, б, а на рис. 3.10, в, – обернений на 900 план цієї ж ланки. Момент сили Fj відносно
точки Рv:
M Pv (Fj )= Fj (Pv L)= Fj (PvC)cos бj .

68
Оскільки відрізок (PvC) зображує в масштабі мv швидкість хC точки С, |
||||
то хC = (PvC)мv . Тоді |
|
|
|
|
M Pv (Fj )= Fj |
хС |
cos бj = |
Pj |
. |
м |
|
|||
|
|
м |
||
|
v |
|
v |
|
Рисунок 3.10 – До виведення формули Жуковського
Це рівняння є аналітичним виразом теореми Жуковського: якщо силу, прикладену до будь-якої точки ланки плоского механізму перенести паралельно самої собі в однойменну точку оберненого плану швидкостей, то момент цієї сили відносно полюсу плану швидкостей буде пропорційним її потужності Рj. Якщо на ланку діє пара сил, то на обернений план швидкостей необхідно переносити кожну складову цієї пари окремо.
Теорема Жуковського застосовується у багатьох задачах динаміки. Зокрема, її можна використати для визначення зрівноважуючого моменту, якщо

69
бажають уникнути послідовного визначення усіх реакцій в кінематичних парах. На рис. 3.11, б для розглянутого прикладу силового аналізу кривошипнокоромислового механізму наведений план швидкостей, обернений на 900 Pvbc і сили G1, G2, G3, Fi1, Fi2, Fi3, прикладені в точках, однойменних з точками прикладення цих сил в механізмі.
Рисунок 3.11 – Важіль Жуковського для визначення зрівноважуючого моменту Tg на ведучій ланці механізму
70
Пари сил з моментами Tg, Mi2, Mi3, представлені складовими F1, F2, F3, прикладеними в точках A, B, C і D перпендикулярно напрямкам відрізків AB, BC і CD. Модулі цих складових знайдені за умов:
F1 |
= |
Tg |
; F2′ = |
M |
i2 |
; F3′ = |
M |
i3 |
. |
lAB |
|
|
|
|
|||||
|
|
|
lBC |
lCD |
|||||
Кожна складова пари сил перенесена в однойменну точку плану швидкостей без зміни її напрямку.
На підставі загального рівняння динаміки сума потужностей всіх зовнішніх сил, прикладених до n ланок механізму та сил інерції ланок дорівнює нулю:
n |
n |
∑Pj +∑Pij = 0 . |
|
j=1 |
j=1 |
За умовою теореми Жуковського це рівняння рівносильне рівнянню моментів відносно полюсу оберненого плану швидкостей (важіля Жуковського):
∑n |
M Pv (Frj )+∑n |
M Pv (Frij )= 0 |
(3.7) |
j=1 |
j=1 |
|
|
В нашому прикладі сили інерції об’єднані з зовнішніми силами і через це рівняння (3.7) має вигляд:
G1rG1 +G2 rG2 -G3rG3 -Fi2 ri1 − Fi3ri3 − F2′(bc)− F3′(cd )+ F1 (ab)= 0.
Звідки знаходимо Tg = F1lAB .
§ 3.2. Рівняння руху механізмів
Для розв’язання головної задачі динамічного розрахунку – визначення закону руху механізму за заданим законам зміни рушійних сил і сил опору необхідно розглядати не окремий механізм, а машинний агрегат, відображаючий собою кінематичний ланцюг, який складається із механізмів двигуна, передаточного пристрою і технологічної машини.
Для знаходження закону руху ланок механізму за різних законах зміни рушійних сил і сил опору розглянемо найпростіший машинний агрегат, який складається із однієї рухомої ланки – ротора двигуна, з’єднаного безпосередньо з ротором технологічної машини, тобто тверде тіло, яке обертається навколо