

teorija_mehanizmov_i_mashin_belanov_savenkov
.pdf21
Другий розділ
Кінематичний аналіз плоских механізмів
§2.1. Задачі і методи кінематичного аналізу механізмів
1.Визначення положень ланок механізмів і траєкторій руху його окремих точок.
2.Визначення лінійних швидкостей точок і кутових швидкостей ланок механізму.
3.Визначення лінійних прискорень точок і кутових прискорень ланок механізмів.
4.Визначення передаточних відношень механізму.
Результати досліджень кінематики використовують для оцінки відповідності кінематичних властивостей механізмів заданим умовам, а також для наступних динамічних розрахунків.
Визначення положень ланок механізму та траєкторій руху їх характерних точок дає можливість проаналізувати правильність дії механізму, аналізувати відповідність траєкторій робочих органів машини технологічним процесам, для виконання яких вони призначені, а також визначити простір, необхідний для розміщення механізмів.
Знання швидкостей руху ланок і їх точок необхідно для визначення кінетичної енергії окремих ланок і механізму машини в цілому при розв’язанні задач динаміки машин.
За векторами прискорень визначають числові значення і напрямок сил інерції, а отже, і значення дійсних навантажень, прикладених до деталей механізмів, за якими можна перевірити міцність деталей машин, які експлуатуються, або розрахувати розміри машин, які проектуються, з забезпеченням доцільної міцності. За відомими силами і переміщенням ланок визначається ККД машини і потужність, необхідна для джерела енергії.
Для виконання кінематичного дослідження механізму повинні бути задані його схема і розміри ланок, а також закон руху вхідної ланки.
При проектуванні нових механізмів (синтезі) за заданими кінематичними параметрами вибирають схеми і визначають основні розміри ланок (метричні параметри) механізму.
Кінематичний аналіз може бути виконаним аналітичними, графічними, експериментальними та комбінованими методами.
Найбільше розповсюдження в інженерній практиці має використання
графо-аналітичного методу.
Аналітичні методи дослідження кінематики найбільш точні та універсальні. Суть їх полягає в установленні функцій зміни параметрів руху (переміщень, швидкостей і прискорень) ланок і їх точок в залежності від заданого закону руху, вхідної ланки.
Для розв’язання знайдених рівнянь з метою визначення кількісних характеристик руху ланок, звичайно використовують ЕЛМ, а оснащення ЕЛМ
22
засобами наглядного відображення результатів обчислення в значній мірі усувають недоліки аналітичних методів через відсутність наглядності.
Графічні методи застосовують для визначення траєкторій точок ланок і положень ланок механізмів.
Експериментальні методи використовують для визначення дійсних положень, швидкостей і прискорень ланок даного механізму і порівняння їх з розрахунковими. Чутливі елементи – датчики перетворюють параметри руху ланок в електричні сигнали, які реєструються відповідною апаратурою.
Графо-аналітичні методи поступаються в точності аналітичним методам, дають можливість наглядно представити картину зміни основних параметрів руху ланок у вигляді планів і діаграм.
§ 2.2. Графо-аналітичні методи кінематичного аналізу плоских механізмів
Графо-аналітичні методи широко застосовують в інженерній практиці при орієнтовних розрахунках кінематики плоских механізмів. Вони характеризуються простотою і надійністю; за ретельного виконання графічних побудов середня похибка не перевищує 7..8 %.
§ 2.2.1. Визначення положень ланок механізму та траєкторій руху його окремих точок
Визначення положень ланок і траєкторій руху точок ведеться на кінематичній схемі механізму, яка відображає тільки ті розміри, які визначають відносні положення кінематичних пар.
Кінематична схема, яка накреслена в масштабі, на якій зафіксовано певне положення вхідної ланки і в зв’язку з ним положення усіх інших ланок,
називається планом положення механізму.
При кресленні кінематичної схеми механізму необхідно вибрати масштабний коефіцієнт довжин ланок, який позначається літерою μl; при цьому
мl = |
|
l |
AB |
|
м |
(2.1) |
||
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
AB |
|
мм |
|
|||
Масштабним коефіцієнтом фізичної величини називається відношення чисельного значення фізичної величини у властивій їй одиниці виміру до довжини відрізка (в мм), який відображає цю величину.
Масштабний коефіцієнт довжин рекомендується вибирати кратним 2, 4, 5, наприклад, μl = 0,001; 0,002; 0,0025; 0,005 і т.д. Вибираючи масштабний коефіцієнт довжин ланок μl необхідно керуватися досягненням потрібної точності дослідження і відведеним полем листа для зображення механізму.
23
При кресленні плану положень механізму необхідно в першу чергу нанести положення нерухомих центрів обертальних пар і нерухомих направляючих для поступальних пар. Потім для вибраного положення вхідної ланки послідовно визначаються положення кінематичних пар і ланок, приєднаних до вхідної ланки. При цьому широко використовується метод засічок для визначення положень рухомих кінематичних пар.
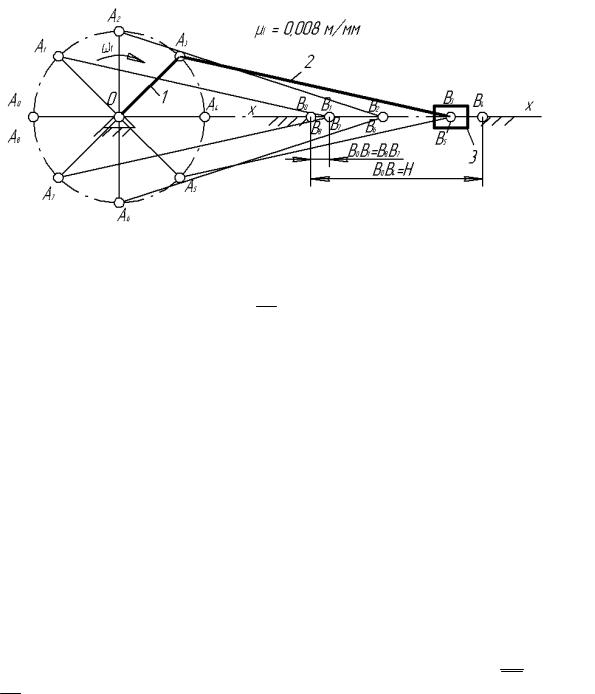
Для освоєння сказаного розглянемо приклад побудови плану положень кривошипно-повзункового механізму, структурна схема якого наведена на рис. (тобто схема, яка накреслена без масштабу). Відомо lОА= 0,2 м; lАВ= 0,6 м і ω1 = 10 рад/с. необхідно побудувати графік переміщень повзуна
1) Виходячи із того, що на папері відведена площа 60×120 мм, і те, що
|
|
≥ 25 мм, приймаємо масштабний коефіцієнт |
довжин ланок мl |
м |
|
за |
||||||||
|
ОА |
|||||||||||||
|
|
|||||||||||||
відношенням |
|
|
|
|
|
мм |
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
мl = |
|
lОA |
|
= |
0,2 |
= 0,008 |
м |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
ОА |
25 |
мм |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
де lOA - довжина кривошипу, м; ОА - довжина кривошипу на плані положень.
Рисунок 2.1 – План положень кривошипно-повзункового механізму
Можна рекомендувати інший шлях вибору мl = lABAB , приймаючи
АВ =150...250мм.
2) Довжина шатуна на кресленні:
24
( |
|
)= |
lАВ |
= |
0,6 |
= 75 мм. |
|
АВ |
|||||||
|
0,008 |
||||||
|
|
|
м |
|
|||
|
|
|
l |
|
|
||
3)Вибираємо на відведеному полі аркуша паперу положення нерухомого центру обертання кривошипу О і напрямній «х-х» для повзуна 3.
4)Будуємо траєкторію руху центра шарніра обертальної кінематичної пари А, окреслив із центру О обертання кривошипа коло радіуса ОА.
5)Приймаючи за початок відліку положень механізму і кривошипу одне із крайніх положень вихідної ланки, яке відповідає початку робочого ходу,
зробимо циркулем засічку із центру О радіуса Rn = AB −OA . Одержимо крайнє
положення шарніра В вихідної ланки В0. (Крайні положення вихідної ланки виникають, коли повздовжні осі кривошипа і шатуна співпадають).
Друге крайнє положення шарніра В веденої ланки відповідає кінцю робочого ходу і визначається точкою В4 на лінії «х-х», яка визначається засічкою
циркулем радіуса Rк = AB +OA із центра О.
6)Виконуємо розмітку положень вхідної ланки (кривошипу), починаючи від
точки А0 за напрямком обертання, розбивши траєкторію шарніра А на декілька рівних частин, наприклад, на 8.
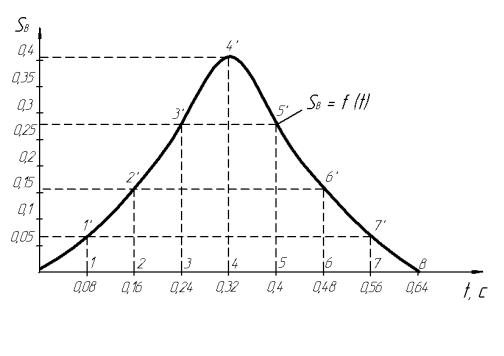
7)Шляхом засічок циркулем радіуса R = AB на лінії «х-х» знаходимо відповідні положення шарніра В вихідної ланки. Маючи відповідні положенню кривошипа положення шарніра В від початкового крайнього положення, можна побудувати графік його переміщень за цикл (за 1 оберт кривошипу). Для цього, вибравши прямокутну систему координат, вздовж вісі абсцис відкладемо 8
рівних відрізків: 0-1; 1-2 і т.д. Позначимо відрізок 0-8 через ht (зображення терміну одного обороту кривошипа).
Термін одного обороту кривошипа:
Т = 2щр = 102р = 0,628 с.
Отже, масштабний коефіцієнт часу:
мt = |
T |
= |
0,628 |
= 0,005 |
c |
. |
h |
120 |
|
||||
|
|
|
мм |
|||
|
t |
|
|
|
|
|
Далі вибираємо зручну величину масштабного коефіцієнта переміщень мs повзуна:
мs = H , hs
де H = (B0 B4 ) мl = 50 0,008 = 0,4м .
25
Прийнявши hs = 80 мм, маємо мs = 080,4 = 0,005 ммм
Рисунок 2.2 – Графік переміщення повзуна
При цьому переміщення точки В, в метрах, відліковується від В0, наприклад
|
|
|
|
SB1 = SB7 = ( |
|
)мl = 5 0,008 = 0,04м. |
|
|
|
|
|
B0 B1 |
|||
З урахуванням мs на діаграмі SB = f (t) |
|||||||
′ |
SB1 |
|
0,04 |
|
|
|
|
(1−1 )= |
|
= |
|
= 8мм і т.д. (рис. 2.2). |
|||
мS |
0,005 |
||||||
|
|
|
|
|
|||
Примітка: Циклом руху вхідної ланки механізму називається відрізок часу, після закінчення якого, положення, швидкість і прискорення цієї ланки приймає початкові значення.
§ 2.2.2. Визначення лінійних швидкостей точок і кутових швидкостей ланок плоских механізмів методом планів швидкостей
Ланки простих механізмів можуть провадити поступальний, обертальний і складний плоский рух.
Поступальний рух – це рух, при якому будь-яка пряма лінія, будучи проведеною в рухомому твердому тілі, залишається паралельною собі самої.
26
Такий рух в механізмі робить повзун (рис. 2.3), який рухається в нерухомих напрямних. Оскільки при цьому русі швидкості всіх точок однакові, а вектори їх паралельні і направлені в одну сторону, то достатньо вибрати будь-яку точку на повзуні і визначити її швидкість, це і буде швидкість повзуна, лінія дії вектора швидкості повзуна паралельна напрямним, по яким повзун переміщається.
Рисунок 2.3 – До питання визначення поступального руху ланки
Обертальний рух твердого тіла відносно нерухомої вісі характеризується тим, що всі його точки описують концентричні кола або дуги.
В механізмах точки кривошипу і обертальних куліс описують кола, а точки коромисел і гойдаючих куліс – дуги.
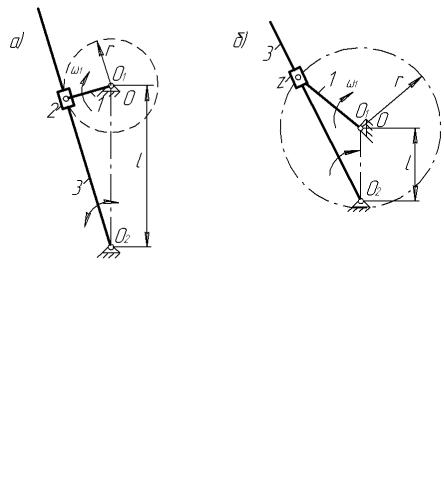
Рисунок 2.4 – Кулісний механізм
Якщо l > r – обертальний рух кривошипу 1 перетворюється в поворотньо-обертальний рух куліси 3 (рис. 2.4, а), при l < r (рис. 2.4, б) – механізм з обертаючою кулісою зі змінною кутовою швидкістю.
Між величиною кутової швидкості ω обертального руху і лінійною (коловою) швидкістю υ будь-якої точки ланки існує залежність:
х=щ r
де r – радіус обертання, який дорівнює відстані від точки, швидкість якої визначається, до вісі обертання.
Вектор колової швидкості х завжди перпендикулярний до радіусу обертання і направлений в сторону обертання.

27
Складний плоский рух. Під складним плоским розуміється такий рух, за якого будь-яка пряма, будучи проведеною в рухомому тілі, не залишається собі паралельною, а всі точки тіла при цьому описують різні за видом траєкторії, які розміщені в одній чи деяких, але паралельних, площинах.
Складний плоский рух твердого тіла визначається рухом відрізка прямої, яка з’єднує дві довільні точки цього тіла і яке рухається в одній площині.
Теорема 1.
Рисунок 2.5 – До питання розкладення складного руху тіла на прості рухи
Миттєвий абсолютний плоский рух вільного твердого тіла в загальному випадку (рис. 2.5) складається з двох рухів: поступального руху разом з довільною точкою А цього тіла, названою полюсом, і обертального руху навколо вісі, яка проходить через цю точку А. (Саме так можна розглядати переміщення тіла на плоскості від положення А0В0 через проміжне положення АВ' в положення АВ).
Якщо в механізмі, нерухому систему координат зв’язати зі стійкою, а рухому – з полюсом ланки, то поступальний рух буде переносним рухом, а обертальний – відносним рухом. Рух же ланки відносно нерухомої системи координат називається абсолютним рухом.
Розглянутий метод розкладання складного плоского руху в реальних механізмах застосовується до шатунів (рис. 2.6).
Рисунок 2.6 – Розкладання складного руху шатуна на два прості рухи
28
Наприклад, точки шатуна кривошипно-повзункового механізму роблять складний рух по відношенню до стійки О. Але коли розглянути рух точок шатуна по відношенню до системи відліку, яка рухається поступально з пальцем кривошипа А, то це буде просте обертання їх відносно пальця, в свою чергу, рух системи координат, скріпленої з пальцем також просте – це поступальний коловий рух.
Так складний рух шатуна можна розглядати як складений з двох простих рухів: обертального навколо пальця кривошипу і поступального кругового (колового) руху системи координат, зв’язаної з пальцем.
Користуючись поняттями абсолютного, переносного і відносного руху, розглянемо.
Теорема 2. Абсолютна швидкість ха будь-якої точки ланки, яка робить складний плоский рух, дорівнює геометричній сумі переносної хе і відносної
хr швидкостей:
ха =хe +хr .
Стосовно точки В ланки 2, це векторне рівняння можна записати у наступному вигляді
хВ =хА +хВА,
де хВ - швидкість точки В в абсолютному русі ланки; хА - швидкість точки В в переносному русі ланки, яка дорівнює абсолютній швидкості точки А, оскільки
переносний рух ланки АВ поступальний рух; хВА - швидкість точки В у відносному (обертальному) русі ланки відносно вісі, яка проходить через точку А (полюс).
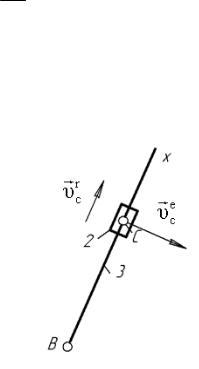
Крім шатуна складний плоский рух в механізмах провадять також кулісні камені, тобто повзуни, які переміщуються в рухомих напрямних (кулісах) (рис. 2.7).
Рисунок 2.7 - Розкладання складного руху каменя на прості рухи
29
В цьому випадку складний плоский рух каменя 2 розкладається на переносне обертальне разом з кулісою Вх і відносне – поступальне по відношенню до куліси:
хС2 =хС3 +хС2С3 ,
де хС2 - швидкість точки С каменя в абсолютному русі; хС3 - швидкість точки С каменя в переносному русі, що означає – абсолютна швидкість тієї точки куліси 3, яка в цю мить співпадає з точкою С каменю 2; хС2С3 - швидкість точки С
каменя в поступальному русі по кулісі, або швидкість відносного руху точки С каменя 2 відносно точки С куліси 3.
Визначення лінійних швидкостей точок і кутових швидкостей ланок методом планів швидкостей застосовується для плоских механізмів, зокрема, для стержньових.
Планом швидкостей називається векторне зображення швидкостей характерних точок ланок механізму для заданого його положення.
§ 2.2.3. Приклади побудови планів швидкості плоских механізмів.
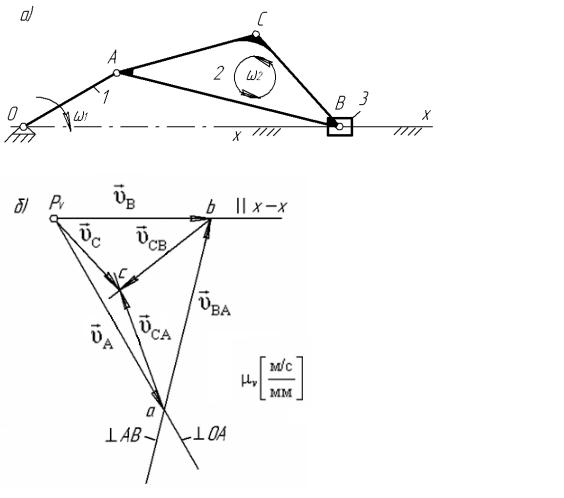
Приклад 1. Відомо: lOA; lAB; lBC; lAC; ω1 = const. Необхідно визначити швидкість характерних точок ланок і кутову ω2 швидкість ланки 2 (рис.2.8, а)
Рисунок 2.8 - План кривошипноповзункового механізму в масштабі μl і план швидкостей
Розв’язання. Виконується побудовою плану швидкостей (рис. 2.8, б).
1) Побудову плану швидкостей починаємо з визначення швидкості точки А. Кривошип А обертається навколо нерухомої вісі, яка проходить через точку О, через це швидкість точки А чисельно дорівнює:
30
хА = щ1lOA = щ1 (ОА)мl , м/с.
Направлена швидкість точки А перпендикулярно до ОА в сторону обертання кривошипу.
Вибираємо положення полюса плану швидкостей – точку Рv.
2) Вибравши відрізок (Рvа) (мм), який зображує швидкість точки А, вирахуємо масштабний коефіцієнт плану швидкостей мv :
мv = |
VA |
|
= |
щ1 |
(OA)мl |
, |
|
м/с |
(2.2) |
|
(Pva) |
(Pva) |
|
|
|
||||||
|
||||||||||
|
|
|
|
мм |
|
|||||
Довжину відрізка (Pv a) вибираємо довільно (в межах 50…100 мм), але таку,
щоб мv одержати у вигляді числа, зручного для рахування (кратне 2, 4, 5).
3) Із полюсу швидкостей Pv проводимо перпендикулярно (ОА) в сторону обертання відрізок довжиною (Pv a).
4) Визначаємо швидкість точки В. Для визначення абсолютної швидкості точки В у відповідності з теоремою 1 розглянемо рух ланки 2 (шатуна) як суму поступального переносного руху разом з полюсом (за полюс приймаємо точку, параметри руху якої відомі) – точкою А і відносного обертального навколо вісі, яка проходить через полюс А.
Векторне рівняння, яке визначає абсолютну швидкість точки В, запишеться на підставі теореми 2 і має вигляд:
хrВ = хrА +хrВА . |
(2.3) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У цьому рівнянні вектори, які відомі за модулем і напрямком, підкреслені двічі, а вектори, для яких відома тільки лінія дії, підкреслені один раз.
Для графічного розв’язання цього рівняння із точки а плану швидкостей, яка зображує кінець вектора хrА , проводимо лінію дії вектора швидкості точки В в обертальному русі ланки 2 навколо полюсу А, тобто хВА АВ, а через полюс
Рv плану – лінію дії хВ паралельно напрямній «х-х» повзуна 3. Річ в тому, що точка В належить і ланці 3, лінія дії швидкості якої відома і паралельна (||) напрямній «х-х». Точка b перетину цих ліній дії визначає відрізок (Рvb),
зображуючий вектор хВ ; згідно з векторним рівнянням напрям цього вектора від точки а до точки b.
Векторний трикутник Рvаb – графічне розв’язання початкового рівняння (2.3); модулі знайдених векторів швидкостей:
хВ =(Рvb)мv ; хBA = (ab)мv .