

teorija_mehanizmov_i_mashin_belanov_savenkov
.pdf41
де aCAn = щ22lCA; |
aCBn = щ22lCB . |
|
|
|
|
||||||
Розв’язуючи |
цю систему |
графічно, |
відкладаємо |
aCAn у |
вигляді |
відрізку |
|||||
(an1 )= |
aCAn |
|
і |
відповідно |
(bn2 )= |
aCBn |
, визначаємо |
точку |
С. Із |
побудови |
|
м |
м |
||||||||||
|
|
|
|
|
|
|
|
||||
|
a |
|
|
|
a |
|
|
|
|
||
виходить, що abc на плані прискорень подібний АВС на плані положення механізму і повернутий відносно його на кут π-α в сторону обертання, якщо ωε
> 0, або проти обертання, якщо ωε < 0; де |
б = arctg |
е |
. |
2 |
|||
|
|
щ |
|
5) Кутове прискорення ланки 2 у його відносному обертальному русі можна |
||||||||||
визначити, використовуючи тангенціальне прискорення з плану прискорень |
||||||||||
е2 = |
aф |
= |
(nb)м |
|
|
1 |
|
|||
|
BA |
a |
|
, |
|
|
|
. |
||
l |
|
м (AB) |
|
2 |
||||||
|
AB |
|
|
C |
|
|
||||
|
|
|
l |
|
|
|
|
|
||
Для визначення напрямку кутового прискорення ε2 ланки 2 переносимо вектор arВфA в точку В на плані механізму і бачимо, що вектор обертає ланку
навколо точки А проти руху годинникової стрілки. Отже, ε2 направлено в ту ж сторону.
Зіставляючи напрямки ω2 і ε2, робимо висновок, що ланка 2 рухається відносно точки А прискорено.
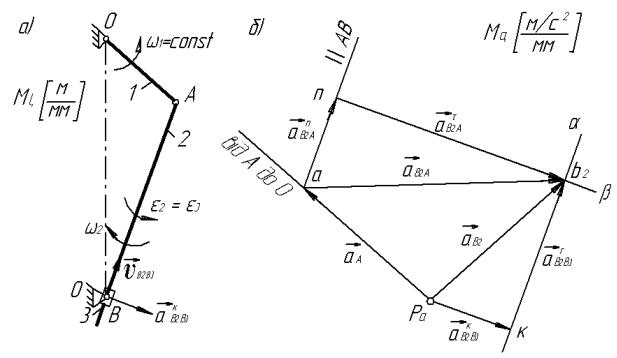
Приклад 2. Знайти прискорення характерних точок і ланок механізму, якщо відомі їх швидкості (рис. 2.15).
Рисунок 2.15 – План положення кулісного механізму і план прискорень
42
Розв’язання: 1) Механізм розпадається на групу 1-го класу, яка утворена ланкою 1 і стійкою О і на групу 2-го класу, утвореною ланками 2 і 3 (діадою).
Для визначення прискорення точки В маємо два векторних рівняння:
аrВ |
2 |
= arВ |
+arВк |
В |
|
|
+arBr |
B |
|
|
|
|
|||||
|
1 |
2 |
1 |
|
2 |
1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(2.8) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
arB |
3 |
= arB |
2 |
+arBn |
O |
2 |
|
+аrВф |
О |
||||||||
|
|
|
3 |
|
3 |
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перше рівняння одержано, відносячи точку В до ланки 2 і розглядаючи рух ланки як такий, що складається із рухів: переносного обертального відносного О1 разом із ланкою 1 і відносного поступального по відношенню до ланки 1.
|
|
При цьому вектор переносного прискорення |
arВ = аrВn |
О |
(оскільки |
ω1 |
|||||||||||||||||
|
|
|
|
|
|
aВ = щ12lO В = щ12 (О1В)мl , а |
|
1 |
1 |
1 |
|
|
|
|
|||||||||
= const, тобто |
|
|
|
|
|
; |
|||||||||||||||||
модуль |
напрям |
співпадає |
з |
ВО1 |
|||||||||||||||||||
прискорення |
Коріоліса- |
1r |
|
1 |
|
r |
r |
|
|
|
модуль |
цього |
вектора |
||||||||||
aВк |
В |
= 2(щ1 |
×хВ В ), тобто |
||||||||||||||||||||
aВк |
|
= 2щ1хВ В |
(оскільки |
r 2 |
1 |
r |
|
|
), |
а |
2 |
1 |
|
одержуємо, обертаючи |
|||||||||
В |
щ1 |
хВ |
В |
напрям його |
|||||||||||||||||||
2 |
1 |
2 |
1 |
|
хrВ В |
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
відносну швидкість |
точки В2 |
каменю 2 на 900 |
в сторону переносного |
||||||||||||||||||||
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
arВr |
|
|
|
|
|
|
|
|
|
|
обертання; відносне |
прискорення |
|
|
В |
точки В2 |
направлено по |
вісі 1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
поступальної пари, а за модулем невідоме.
Друге векторне рівняння (2.8, 2) одержане, відносячи точку В до ланки 3, яке в загальному випадку виконує складний рух. Тоді прискорення arВ2
крайнього шарніру О2 двохповідкової групи повинно бути заданим: у даному |
||||||||||||||||||||||||||||||||||||||||||
випадку |
|
arВ |
= 0 ; вектор arВn |
O |
2 |
|
|
направлений по |
О2В, |
його модуль |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
arВфO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
aВn |
O |
|
= щ32lO В = щ32 (О3 В)мl ; |
вектор |
|
2 |
направлений |
перпендикулярно до |
||||||||||||||||||||||||||||||||||
3 |
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
arВ |
= аrВ , маємо |
|||||||||||
радіусу обертання О2В, а за модулем невідомий. Оскільки |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
rк |
|
|
rr |
rn |
|
|
rф |
|
(2.9) |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аВ1 +aВ2 В1 |
+aB2 B1 = aB3O2 +аВ3О2 . |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= arВ , |
|
|
|
|
|
|
|
|
|
|
Від довільного полюсу |
Ра |
|
(рис. 2.15, б) відкладаємо вектор |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Рab1 |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= arВк |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||||
від кінця останнього – вектор |
|
|
|
|
|
і через точку К проводимо пряму |
||||||||||||||||||||||||||||||||||||
b1k |
|
В |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
arВr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
кв1 |
|
|
|
|
В |
(тобто паралельно вісі поступальної пари ( |
|
|
|
O A)). Потім від того ж |
||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||
полюсу Ра відкладаємо вектор ( |
|
)= arВn |
|
|
і через його кінець проводимо пряму |
|||||||||||||||||||||||||||||||||||||
Pa n |
O |
2 |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
arВr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
(тобто перпендикулярно до О2В). Перетин прямих кв1 |
і nв дає точку |
||||||||||||||||||||||||||||||||
nв |
|
|
|
|
O |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
b2(b3) плану прискорень, з якою співпадають кінці векторів:
43
|
|
|
|
= arr |
|
|
; |
|
|
= arф |
; |
|
|
|
|
= ar |
|
|
= ar |
||||
|
|
|
кb |
В |
nb |
|
Р b |
В |
|
||||||||||||||
|
|
2 |
В |
|
|
|
3 |
|
|
В O |
2 |
|
|
a |
3 |
|
2 |
В |
|||||
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
3 |
||
тобто |
aВr |
В = (kb2 )мa ; |
aВфO |
2 |
= (nb3 )мa ; |
|
|
aВ |
= aВ |
|
= (Pab3 )мa . |
||||||||||||
|
2 |
1 |
|
3 |
|
|
|
|
|
|
|
|
|
2 |
|
|
3 |
|
|
|
|
||
|
Кутове прискорення ланки 3: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
е |
= |
aВфO |
2 |
= |
(nb |
)м |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
3 |
|
3 |
|
a |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
l |
|
|
(O B)м . |
|
|
|
||||||||||
|
|
|
|
|
|
|
3 |
|
|
O2 B |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
l |
|
|
|
|
|
|
||
Для встановлення напряму ε3 ланки 3, переносимо вектор arВф3O2 з плану
прискорень на план механізму в точку В.
Можна бачити, що ланка 3 зазнає уповільненого руху через різні напрямки ω3 і ε3.
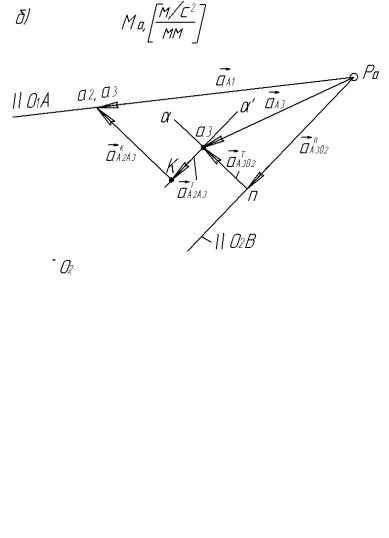
Приклад 3. Визначити прискорення характерних точок механізму і ланок, якщо відомі швидкості (рис. 2.16).
Рисунок 2.16 – План положення кулісного механізму і план прискорень
44
Розв’язання: 1) Механізм розкладається на групу 1-го класу, утворену ланкою 1 і стійкою О, і групу 2-го класу, утворену ланками 2 і 3.
Отже, відносячи точку А до ланки 1, знаходимо її прискорення аА1 , яке направлене по АО1, а його модуль:
|
|
|
м |
|
|
aА1 |
= щ12lO1 А = щ12 (О1 |
А)мl |
|
|
|
с |
2 |
||||
|
|
|
|
|
|
2)Приймаємо масштабний коефіцієнт прискорень мa .
3)З другої сторони, для визначення прискорення точки А, маємо два векторних рівняння:
аrА |
= аrА |
+arАк |
А |
|
+arАr |
А |
|
|
|
|
||||
2 |
3 |
2 |
3 |
|
2 |
3 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
. |
(2.10) |
||
|
|
|
|
|
|
|
|
|
|
|
||||
arА |
= arО |
2 |
+arАn |
O |
2 |
+аrАф |
О |
|||||||
3 |
|
|
3 |
|
3 |
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перше рівняння (2.10, 1) одержали, відносячи точку А до ланки 2 і розглядаючи її рух складений із рухів: переносного обертального разом із
ланкою 3 ( arА3 ) і відносного поступального по відношенню до ланки 3 ( arАr 2 А3 ). Друге рівняння (2.10, 2) одержали відносячи точку А до ланки 3, у
якого arО2 = 0 . Отже маємо
|
|
|
|
|
|
|
r |
r |
|
rn |
|
|
|
rф |
|
|
|
|
r |
|
|
|
rк |
rr |
|
|
|
|
|
|
|
(2.11) |
||||||
|
|
|
|
|
|
|
a |
А2 = aА1 |
= aА3O2 +аА3О2 +a |
А3 +aА2 А3 +aА2 А3 . |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В цьому рівнянні |
aАn |
O |
2 |
= щ32lO |
2 |
А = щ32 (О2 А)мl , |
а його напрям співпадає з |
|||||||||||||||||||||||||||||
|
|
|
|
|
arАк |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
хrА А в |
|||||
|
|
; вектор |
|
|
одержав обертання на 900 по відношенню до вектора |
|||||||||||||||||||||||||||||||||
О2 В |
|
А |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А = 2щ3хА А ; вектор arАr |
|
|
2 |
3 |
|||||||||
сторону обертання ланки 3, а його модуль |
aАк |
О |
2 |
О2 В, |
||||||||||||||||||||||||||||||||||
а вектор arАr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
3 |
|
|
2 |
3 |
|
3 |
|
|
|
||||||
А |
|
|
О2 В, але невідомі за модулем. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Таким чином, із багатокутника прискорень необхідно найти модулі |
||||||||||||||||||||||||||||||||||||
векторів arАr |
О |
2 |
|
і arАr |
А . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3 |
|
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= arА , потім із того |
|||||||
|
|
Із полюсу Ра (рис. 2.16, б) відкладаємо вектор |
Рa а1 |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= arАn |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||
ж полюсу відкладаємо вектор |
|
|
|
|
і через точку n проводимо пряму |
|||||||||||||||||||||||||||||||||
|
Раn |
O |
2 |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
arАфО |
|
|
|
|
|
|
||||
nб O2 B , по якій необхідно буде направити вектор |
2 |
. Оскільки модуль |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
||
цього вектора, а отже, і кінець а3, зображуючий його, невідомий, то наступне |
||||||||||||
додатне |
arАr |
А , обходимо і до |
кінця вектора ( |
|
) добудовуємо |
вектор |
||||||
Pa а1 |
||||||||||||
|
|
= arАк |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
цього вектора проводимо лінію кб′ |
|
|
|
O2 B , |
|||||
ка1 |
А . Тепер із початку «к» |
|||||||||||
|
|
|
||||||||||
2 |
3 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||
45
|
|
|
arАr |
А . Точка перетину а3 прямих nб і |
кб′ |
|
|
|
|
|
= arАф |
|
|
|
|||||||||||
тобто |
|
|
є кінцем вектора |
na3 |
О |
|
і |
||||||||||||||||||
|
|
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
= arАr |
|
|
3 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
початком |
|
вектора |
|
|
|
|
|
|
|
|
А , |
|
тобто |
||||||||||||
|
|
|
|
|
а3 |
к |
|
||||||||||||||||||
|
= (nа3 )мa ; aАr |
A = (a3k)мa ; |
|
|
= (Pv a3 )мa . |
|
|
2 |
3 |
|
|
|
|
|
|||||||||||
aАфО |
aA |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
3 |
2 |
|
|
|
2 |
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кутове прискорення куліси 3: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
е |
= |
a |
АфO |
2 |
= |
(nа |
3 |
)м |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
l |
|
|
(O А)м . |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
3 |
|
|
O2 А |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
l |
|
|
|
|
|
|
|
|
|||
Напрям ε3 одержимо, якщо вектор arАф3О2 перенесемо з плану прискорень
в точку А куліси на плані механізму.
Можемо зробити висновок, що ланка 3 рухається прискорено, оскільки співпадають з напрямком ω3 і ε3.
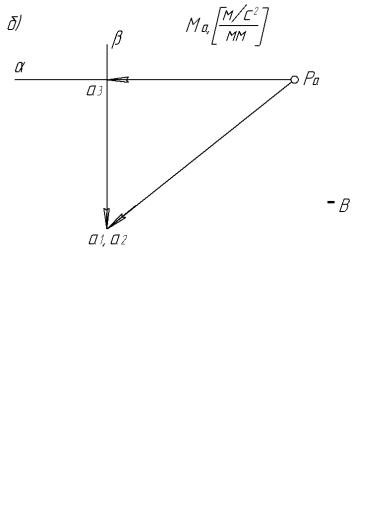
Приклад 4. Визначити прискорення характерних точок синусного механізму для заданого його положення, якщо відомо lОА; ω1 = const і відомі швидкості (рис. 2.17).
Рисунок 2.17 – Плани положення і прискорення синусного механізму
46
Розв’язання: 1) Механізм розкладається на групу 1-го класу, яка утворена ланкою 1 і стійкою О і на групу 2-го класу, утвореною ланками 2 і 3 (діадою).
Для визначення прискорення точки А маємо два векторних рівняння:
аrА |
= аrА |
= arAn |
|
|
|
|
|||
1 |
2 |
|
1 |
|
|
|
|
||
arA |
= аrА |
+arAr |
A . |
(2.12) |
|||||
2 |
3 |
2 |
3 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перше рівняння одержано, відносячи точку А до ланки 1; модуль прискорення
точки aAn1 = щ12lOA = щ12 (ОA)мl .
Друге рівняння одержали, відносячи точку А до ланки 2 і розглядаючи ї рух як такий, що складається із поступального руху разом з ланкою 3 і відносного поступального руху ланки 2 відносно ланки 3.
Отже, вибравши масштабний коефіцієнт прискорень із довільного
полюсу |
Ра |
креслимо відрізок |
|
= |
|
= arАn |
паралельно ОА; із |
того |
ж |
|||||
Раа1 |
Раа2 |
|||||||||||||
полюсу проводимо пряму (Раб) |
|
|
|
1 |
|
|
|
|
аrА |
|||||
паралельно лінії |
|
|
, а із кінця вектора |
|||||||||||
|
DB |
|||||||||||||
(точка а1) проводимо лінію ( |
|
); |
точка а3 перетину ліній (Раб) і (а1в) |
|
1 |
|||||||||
|
|
|||||||||||||
а1в |
є кінець |
|||||||||||||
вектору |
аrА |
і початок вектора arА А . |
|
|
|
|
|
|
||||||
|
3 |
2 |
3 |
|
|
|
|
|
|
|
|
|||
Приклад 5. Визначити прискорення характерних точок кулісного механізму та ланок, якщо відомі швидкості (рис. 2.18).
Рисунок 2.18 – План положення кулісного механізму і план прискорень
47
Розв’язання: 1) Механізм розкладається на групу 1-го класу, яка утворена ланкою 1 і стійкою О і на групу 2-го класу, утвореною ланками 2 і 3.
rОтже, відносячи точку А до ланки 1, знаходимо вектор її прискорення
аА , який направлений по АО, а його модуль
|
м |
|
|
aA = щ12lOA = щ12 (ОA)мl |
|
|
|
с |
2 |
||
|
|
|
|
2) |
Приймаємо масштабний коефіцієнт прискорень мa , |
м/с2 |
. |
|
||||||||||||||||
|
мм |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3) |
Для визначення прискорення точки В маємо два векторних рівняння: |
|
||||||||||||||||||
|
аr |
= аr |
+arn |
|
|
+аrф |
|
|
|
|
|
|
||||||||
|
В2 |
|
А |
|
|
|
В2 А |
|
|
|
|
В2 А |
|
|
|
|
|
|||
|
аrВ |
2 |
= arВ |
+arВк |
В |
3 |
+arВr |
2 |
В |
. |
|
(2.13) |
||||||||
|
|
3 |
2 |
|
|
|
|
|
|
3 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перше рівняння (2.131) одержано, відносячи точку В до ланки 2 і розглядаючи її рух, складений із рухів: переносного поступального разом з ланкою 2 з прискоренням полюсу (точки А) і відносного обертального руху ланки 2 навколо вісі, яка проходить через полюс (точку А).
Вектор нормального прискорення arВn2 А має модуль aВn2 A = щ22lAВ = щ22 (AВ)мl , а направлений паралельно АВ від В до А. Напрям дії
вектора прискорення arВАф відомий ( АВ), але модуль його невідомий.
Друге рівняння (2.132) одержано, відносячи точку В2 до ланки 2, але розглядаючи рух ланки як такий, що складається із рухів: переносного поступального з прискоренням полюсу (точки В3 ланки 3, яка співпала з точкою В2 ланки 2) і відносного поступального руху ланки 2 відносно 3. Оскільки при
цьому змінюється напрям вектора arВr2 В3 відносного руху ланки 2 по відношенню до ланки 3 через те, що відбувається одночасно обертання разом з
ланкою 3, виникає коріолісове прискорення |
arВк |
В , модуль якого дорівнює: |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
3 |
|
|
|
|
|
|
|
aВк |
В |
= 2щ2хВ |
В |
3 |
, а напрям його визначається обертанням відносно υrВ |
2 |
В |
3 |
на 900 в |
|||||||||||
2 |
3 |
2 |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
при відносному русі |
|||||
сторону дії щ2 . Напрям вектора прискорення точки В2 |
||||||||||||||||||||
ланки 2, тобто |
|
arВr |
В , також відомий – паралельно АВ. Отже, графічно необхідно |
|||||||||||||||||
|
|
|
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
розв’язати рівняння (2.14): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
r |
|
rn |
|
rф |
rк |
|
rr |
, |
|
|
|
(2.14) |
||
|
|
|
|
|
|
аА |
+aB2 А +аВ2 А = aВ2 В3 |
+aB2 B3 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

48
aВ3 = 0 , оскільки точка В3 не переміщується. Із полюсу Ра відкладаємо відрізок Раа = arА ; із точки а проводимо відрізок аn = arBn2 А ; з точки n проводимо лінію nв АB , тобто лінію дії вектора arВф2 А . Через полюс Ра будуємо вектор коріолісового прискорення точки В куліси 2 (arВк2 В3 ), а потім із
точки к проводимо лінію кб
 АB . Перетин ліній nв і кб дає точку В2 і, отже,
АB . Перетин ліній nв і кб дає точку В2 і, отже,
рішення рівняння (2.14): aВф |
|
А = ( |
|
)мa ; |
aBr |
B = ( |
|
|
)мa ; |
|
aB |
= ( |
|
)мa . |
|||||||
|
nb2 |
kb2 |
|
Pab2 |
|||||||||||||||||
2 |
|
|
|
|
|
|
2 |
3 |
|
|
|
|
|
|
|
|
3 |
|
|
||
Визначаємо кутове прискорення ланки 2 і 3: |
|
|
|
|
|
|
|
||||||||||||||
|
|
е |
= е = |
aВф А |
|
= |
(nb |
)м |
1 |
|
|
|
|
||||||||
|
|
|
2 |
|
2 |
|
a |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||
|
|
2 |
3 |
|
|
lАВ |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
(АB)мl c |
|
|
|
|
|
|||||||
Напрямок ε3 = ε2 |
одержимо, |
якщо вектор |
arBф2 А |
перенесемо з плану |
|||||||||||||||||
прискорень в точку В куліси на плані механізму.
Можна зробити висновок, що ланка 2 у відносному русі зазнає уповільнення, оскільки за напрямком ω2 і ε2 не співпадають.
§ 2.3.2. Властивості планів прискорень
1. Вектори, які починаються з полюсу Ра плану прискорень, зображають в масштабі мa абсолютні прискорення відповідних точок ланок
механізму; вектори, які не проходять через полюс – це відносні прискорення точок ланок.
2.Усі точки механізму, прискорення яких дорівнює нулю, зображаються в полюсі Ра.
3.Незмінній фігурі на плані механізму – ланці на плані прискорень відповідає фігура подібна і схоже розташована (на плані прискорень повертати
в сторону обертання відносно фігури на плані механізму, якщо |
ωε > 0, або |
е
проти обертання, якщо ωε < 0, на кут π-α, де б = arctg щ2 . 4. За плану прискорень можна визначити:
-прискорення будь-якої точки механізму, з’єднавши цю точку на плані прискорень з полюсом;
-кутові прискорення ланок, скориставшись вектором тангенціального
прискорення і враховуючи, що е = аф ;
с
49
- положення центру кривизни траєкторії руху будь-якої точки,
скориставшись залежністю с = х2 = аn ;
аn щ2
- положення миттєвого центру прискорень ланки, скориставшись властивостями 2 і 3.
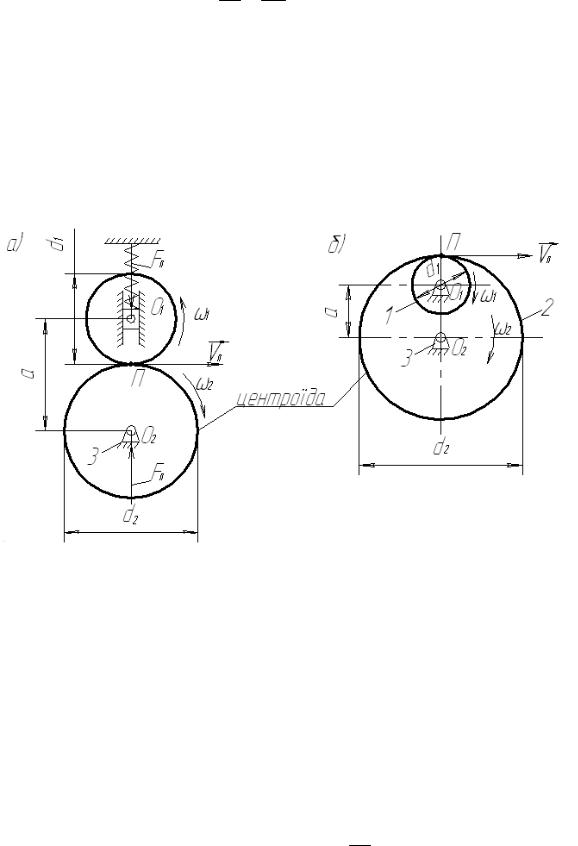
§2.4. Кінематичний аналіз фрикційних і зубчастих механізмів
§2.4.1. Передаточне відношення простого фрикційного та зубчастого механізму з нерухомими осями обертання
Рисунок 2.19 – Кінематичні схеми фрикційних передач з
циліндричними шківами |
|
|||||
Відношення кутової швидкості ωі |
ланки і до кутової швидкості ωj |
|||||
ланки j називається передаточним відношенням. |
|
|||||
uij = ωi ; |
u ji = |
ωj |
. |
(2.15) |
||
|
||||||
ω |
j |
|
ω |
i |
|
|
|
|
|
|
|||
Його можна виразити через конструктивні параметри передачі
2.19, а,б):
u12 = ω1 = m d2 , ω2 d1
де d1 і d2 - діаметри шківів.
(рис.
(2.16)
50
Ця умова виходить з того, що кола шківів є центроїди у відносному русі ланок (як відомо з теоретичної механіки, центроїдою називається геометричне місце миттєвих центрів обертання ланок у відносному русі). Знак «плюс» відноситься до однакового напрямку обертання ланок (рис. 2.19, а), знак «мінус» - протилежному (рис. 2.19, б). У відповідності з розташуванням центроїд механізм з додатним передаточним відношенням називають механізмом з внутрішнім зачепленням, а з від’ємним – механізмом з зовнішнім зачепленням.
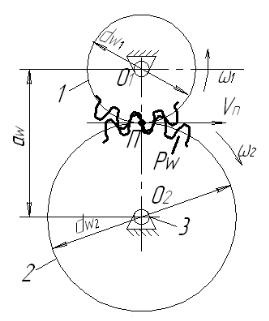
Рисунок 2.20 – Кінематична схема простої зубчастої циліндричної передачі
Простим зубчастим механізмом є трьохланковий механізм круглих циліндричних коліс, у яких діаметри dw1 і dw2 є діаметрами центроїд у відносному русі ланок 1 і 2, а точка П є миттєвим центром обертання у відносному русі.
Якщо в механізмах фрикційних передач центроїди це гладкі круглі циліндричні колеса, то в механізмах зубчастих передач колеса для передачі руху наділяються зубцями. Для зубчастого механізму, складеного із двох зубчастих коліс і стійки, формула (2.16) залишається придатною, якщо підставити діаметри центроїд (початкових кіл) dw1 і dw2:
u12 = ω1 |
= m |
dw2 |
. |
(2.17) |
|
||||
ω2 |
|
dw1 |
|
|
Передаточне відношення зубчастого механізму можна виразити також |
||||
через числа зубців, якщо прийняти до уваги співвідношення |
рdw1 = pw z1 і |
|||
рdw2 = pw z2 , де pw - крок зубців на початковому колі: |
|
|||