

teorija_mehanizmov_i_mashin_belanov_savenkov
.pdf111
Швидкість ковзання зубців для моменту контакту їх в точці К:
υковз =υК1К2 =υКt |
1 −υКt |
2 =υКN (tgбK1 −tgбK 2 )=ω1rb1 (tgбK1 −tgбK 2 ), (а) |
|||||||||||
|
|
tgбK1 = |
l |
p1 |
|
+l |
k |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
r |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
b1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де |
|
|
l |
|
|
−l |
|
|
. |
(б) |
||
|
|
|
|
p2 |
|
|
|
|
|||||
|
|
tgбK 2 = |
|
|
|
|
|
k |
|
||||
|
|
|
|
|
|
r |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
Питоме ковзання зубців шестерні враховується коефіцієнтом питомого ковзання:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω2 rb2 |
lp2 −lk |
|
|
|
|
υt |
|
− |
υt |
|
υt |
|
|
|
ω r |
tgб |
K 2 |
|
r |
|
|
|||||||
л1 = |
К1 |
|
|
|
К2 |
=1− |
К2 |
|
=1− |
2 b2 |
|
=1− |
|
b2 |
|
= |
|||||||
|
|
|
|
|
|
ω r tgб |
|
|
lp1 +lk |
|
|||||||||||||
|
|
υt |
|
|
|
|
|
|
υt |
|
|
|
K1 |
ω1rb1 |
|
|
|||||||
|
|
|
К1 |
|
|
|
|
|
К1 |
|
1 b1 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rb1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
=1− |
ω2 |
с2 |
|
=1−u |
21 |
ρ2 |
; |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
ω |
|
ρ |
1 |
|
|
|
|
ρ |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
= l, |
|
|
|
ρ1 = x, маємо коефіцієнти питомого ковзання |
|||||||||||||||
Позначаючи |
|
|
N1 N2 |
|
|
|
|||||||||||||||||
зубців шестерні λ1 і колеса λ2:
л1 =1+u21 − xl u21 .
|
л2 = |
υt |
−υt |
|
=1−u12 |
|
x |
, |
|
л2 =1+u12 − |
l |
u12 |
|
|||||||||
Аналогічно |
|
|
К2 |
|
К1 |
|
|
|
або |
|
. |
|||||||||||
|
|
|
t |
|
|
l |
− x |
l − x |
||||||||||||||
|
|
|
|
|
|
|
υК2 |
|
|
|
|
|
|
|
|
|
|
|||||
Тут u12 = |
ω1 |
= |
z2 |
, |
|
u21 |
= |
ω2 |
= |
z1 |
, x |
– відстань від точки N1 дотику |
||||||||||
ω |
2 |
|
z |
|
ω |
z |
2 |
|||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
теоретичної лінії зачеплення з основним колом першого (меншого) колеса, відліковане у напрямку до точки N2.
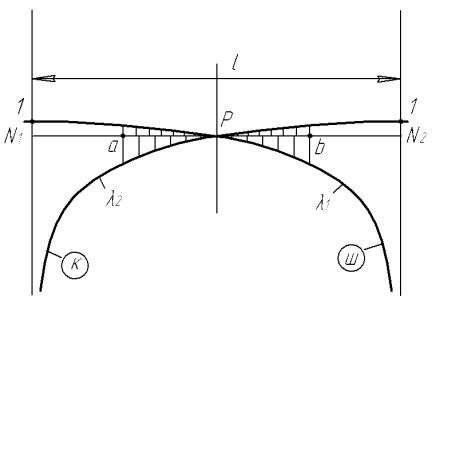
Користуючись формулами у прямокутних дужках, складемо таблицю значень λ1 і λ2. Для цього заміряємо довжину l, підставляємо одержане значення в формули, а потім рахуємо ряд значень λ1 і λ2, змінюючи x в межах від 0 до l з інтервалами 15…30 мм.
112
Таблиця значення λ1 і λ2
x |
0 |
… |
… |
… |
… |
… |
N1P |
|
|
|
|
|
l |
λ1 |
- ∞ |
|
|
|
|
|
0 |
|
|
|
|
|
1 |
λ2 |
1 |
|
|
|
|
|
0 |
|
|
|
|
|
- ∞ |
Необхідно знати, що в полюсі Р коефіцієнти λ1 і λ2 дорівнюють нулю. Користуючись даними, наведеними в таблиці, будуємо діаграми для
значень коефіцієнтів λ1 і λ2 в прямокутній системі координат (рис. 4.14).
Рисунок 4.14 – Діаграми питомих ковзань зубців шестерні λ1 і колеса λ2 .
113
Розділ п’ятий
Синтез кулачкових механізмів
§ 5.1. Визначення основних розмірів кулачкових механізмів. Види кулачкових механізмів.
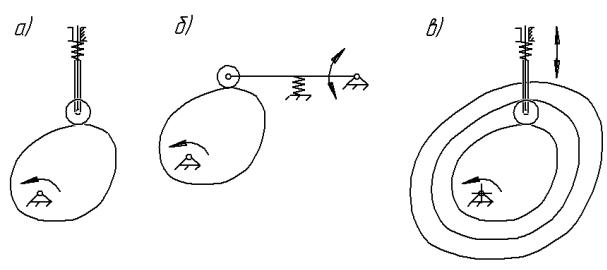
Вхідною ланкою в кулачковому механізмі звичайно є кулачок, тобто ланка, якій належить елемент вищої пари, виготовлений у вигляді поверхні змінної кривизни. Прямолінійно рухаюча ланка зветься штовхачем, а обертаюча (коливаюча) – коромислом. Для зменшення тертя по поверхні кулачка вихідна ланка часто наділяється роликом.
Рисунок 5.1 – Види кулачкових механізмів
Постійне торкання ланок у вищій парі забезпечується силовим, або геометричним замкненням.
При силовому замкненні (рис. 5.1, а, б) постійне притискання ланок відбувається під дією пружини, сили ваги і т.д.
При геометричному замкненні можливість віддаленню однієї ланки від другої унеможливлюється введенням допоміжної (залишкової) в’язі, яка не накладає нових обмежень на відносний рух ланок. Одним із розповсюджених способів геометричного замкнення є застосування пазового кулачка (рис. 5.1,
в).
Еквівалентні (замінюючі) механізми
Якщо в механізмі з вищою парою обидві її ланки утворені поверхнями с постійною кривизною, то цей механізм може бути заміненим кінематично еквівалентним механізмом з нижчими парами. Наприклад, ексцентрикові механізми замінені на кривошипно-повзунковий (рис. 5.2, а), або на кривошипно-коромисловий (рис. 5.2, б). Якщо один із профілей – пряма лінія,

114
то його центр кривизни віддаляється у безкінечність і замість шарніра у замінюючого механізму буде поступальна пара (рис. 5.2, в).
Рисунок 5.2 – Заміна кулачкового механізму шарнірно-стержньовим
Кут тиску на ведену ланку кулачкового механізму. Основні розміри кулачкового механізму вибираються за умов виконання заданих обмежень із яких, в першу чергу необхідно відмітити обмеження по куту тиску.
Визначимо, наприклад, кут тиску на веденій штовхач 2 для механізму (рис. 5.3), у якого центр ролика В рухається по прямій, зміщеної відносно центру обертання кулачка 1.
Рисунок 5.3 – До визначення кута тиску для кулачкового механізму
115
Зміщення е вважаємо додатним, якщо напрям швидкості штовхача при його підйомі складає гострий кут з напрямною швидкості точки контакту на кулачці.
Переміщення штовхача s і кут повороту кулачка φ відліковуються від положення початку фази підйому, тобто від найнижчого положення центра ролика, який знаходиться на відстані Rо від центра О обертання кулачка. Ця відстань, яка зветься початковим радіусом, співпадає з мінімальним радіусвектором центрового профілю кулачка, під яким розуміється траєкторія центра ролика відносно кулачка.
Кут тиску ϑ на ведений штовхач дорівнює куту між нормаллю n-n до центрового профілю (або, те ж саме, до профілю кулачка) і швидкістю центра ролика. Його величину можна знайти із повернутого на 900 плану швидкостей, побудованого за рівнянням
υВ2 =υВ1 +υВ2B1 . |
(5.1) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полюс плану швидкостей Pv сполучаємо з центром ролика, а точку b1 плану – з центром обертання кулачка. Тоді масштабний коефіцієнт плану
швидкостей буде дорівнювати: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υВ1 |
|
ωlOB |
|
|
ω( |
|
|
|
)μl |
=ωμl , |
|
||
μv = |
= |
|
= |
|
OB |
(5.2) |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||
hυB1 |
(OB) |
|
|
|||||||||||
|
|
|
(OB) |
|
||||||||||
де μl - масштабний коефіцієнт довжин; ω – кутова швидкість кулачка. Із точки
b1 проводимо напрямок вектора υВ2B1 (у повернутого плану швидкостей паралельно нормалі (n-n) до перетину з проведеного із полюсу Pv
перпендикуляром до швидкості штовхача υВ2 . |
|
Одержаний відрізок Pvb2 дає |
||||||||||||||
модуль швидкості υВ2 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υВ2 = (Рvb2 )μv . |
|
|
|
|
|
|
|
|
(5.3) |
|||||
Підставивши в |
цю формулу |
масштабний |
коефіцієнт |
із (5.2) і |
||||||||||||
′ |
|
|
|
dS |
= |
dS |
|
dϕ |
|
S |
′ |
= |
dS |
|
||
S = S(ϕ) і |
|
|
|
|
), |
|
|
- аналог |
||||||||
враховуючи, що υВ2 = S |
ω (оскільки |
|
dt |
|
dϕ |
|
dt |
|
|
|
dϕ |
|||||
швидкості штовхача, одержимо |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
′ |
|
|
|
|
звідки |
|
|
|
|
|
|
|
|
||
|
S ω = (Pvb2 )μlω , |
|
|
|
|
|
|
|
|
|
||||||
|
|
(P b )= |
S′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
(5.4) |
|||
|
|
v |
2 |
μ |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
116
тобто відрізок (Pvb2 ) в масштабі схеми відображає аналог швидкості штовхача. Із трикутника b1кb2 з урахуванням (5.4) знаходимо
|
|
|
|
|
|
( |
|
)−e |
|
S′−e |
|
||
tgϑ = |
кb2 |
|
= |
Pvb2 |
= S + |
|
|||||||
|
|
|
|
|
|
|
|
|
−e2 . |
(5.5) |
|||
|
|
|
|
|
|
|
|
|
|||||
|
кb1 |
S + R2 |
−e2 |
R2 |
|||||||||
|
|
|
|
|
|
|
|
o |
|
|
o |
|
|
Для кулачкового механізму з центральним штовхачем, тобто для механізму без зміщення (е = 0), маємо
tgϑ = |
S′ |
|
|
|
. |
(5.5) |
|
S + R |
|||
|
0 |
|
|
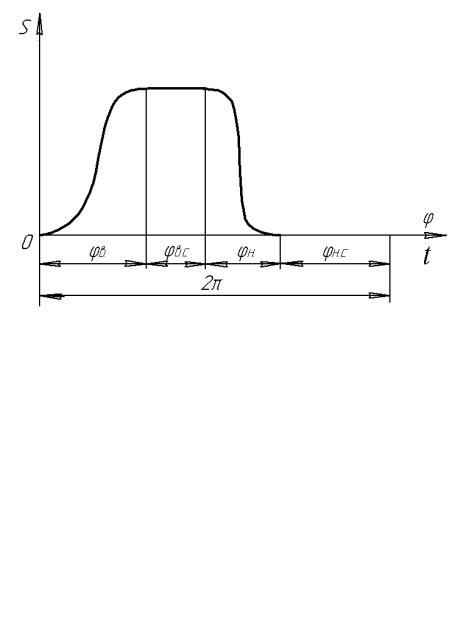
Етапи синтезу кулачкового механізму
1 етап – визначення мінімального радіус-вектора кулачка Rо;
2 етап – визначення елемента вищої парі на кулачці за заданою залежністю між переміщенням вхідної і вихідної ланки.
Рисунок 5.4 – Типова залежність між переміщення штовхача s і кутом повороту кулачка ϕ
У відповідності з видом графіка S = S(ϕ) ділянка на куті ϕв - фаза віддалення; на куті ϕн - фаза наближення. Між ними можуть бути фази стояння: ϕв.с - верхнього стояння; ϕн.с - нижнього стояння.
117
§ 5.2. Силовий аналіз кулачкового механізму з урахуванням тертя
При силовому аналізі напрям відносних швидкостей у всіх кінематичних парах вважаються заданими. Через це в рівняннях кінетостатики сили тертя увійдуть з відомим знаком на відміну від шуканих реакцій.
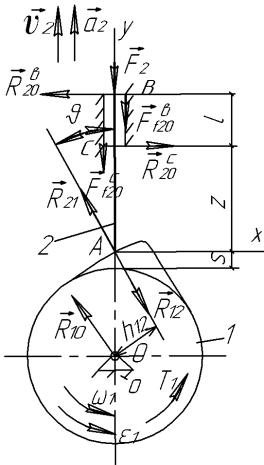
Рисунок 5.5 – До силового аналізу кулачкового механізму
Тертя враховуємо тільки в напрямних поступальної пари, причому вважаємо, що внаслідок достатнього зазору в цій парі ланки 2 при його перекосі торкається напрямних у двох точках В і С на відстані l.
При силовому аналізі вважаємо заданими кутові швидкість ω1 і прискорення ε1 ланки 1, швидкість υ2 і прискорення а2 ланки 2, момент інерції I1 ланки 1 відносно вісі її обертання, масу m2 ланки 2, розміри l і z,
коефіцієнт тертя f, кут ϑ і зовнішню силу F2, яка діє на ланку 2. Необхідно r
знайти реакції R21 , R20b , R20c і R10 .
Рівняння кінетостатичної рівноваги ланки 2 за наведеними на рисунку напрямках реакцій записуємо у вигляді рівнянь проекцій на осі Ах і Аy і рівняння моментів відносно точки А:
118
|
|
|
|
∑Fix |
= −R20b |
+ R20c − R21 sinϑ = 0; |
|
|
|
|
|
|
(5.7) |
|||||||||||||||||||
|
|
∑Fiy = − f (R20b + R20c )+ R21 cosϑ − F2 −m2 a2 = 0; |
|
(5.8) |
||||||||||||||||||||||||||||
|
|
|
|
∑mA (Fc )= R20b |
(l + z)− R20c z = 0. |
|
|
|
|
|
|
(5.9) |
||||||||||||||||||||
Із (5.9) маємо |
R20c |
= R20b |
|
|
l + z |
. |
Підставивши |
|
значення |
R20c в |
(5.7), |
|||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
l + z |
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
знаходимо |
− R20b + R20b |
− R21 sinϑ = 0, |
звідки |
|
|
|
R20b |
|
|
− R21 sinϑ = 0 |
і |
|||||||||||||||||||||
z |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
||||
R20b = R21 |
z sinϑ |
= 0 |
. Тоді |
R20c |
= R21 |
|
|
z +l |
sinϑ |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тепер, із рівняння (5.8) одержуємо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
2z +l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
− f |
|
|
|
R |
|
|
|
sinϑ + R |
cosϑ − F |
|
−m |
a |
|
|
= 0, |
|
|
||||||||||||
|
|
|
l |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
21 |
|
|
|
|
21 |
|
|
2 |
2 |
|
2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
2z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
звідки |
R21 cosϑ |
− f 1 |
+ |
|
|
|
|
sinϑ = F2 +m2 a2 . |
Тоді |
|
|
|
|
|
|
|
||||||||||||||||
l |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
R21 = |
|
|
|
|
|
|
|
F2 +m2 a2 |
|
|
|
|
. |
|
|
|
|
|
|
(5.10) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2z |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
cosϑ − f 1+ |
|
sin |
ϑ |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Як можна бачити, R20b |
, |
|
R20c |
при |
R21 > |
0 |
мають знак плюс, |
тобто |
||||||||||||||||||||||||
направлення реакцій були вибрані правильно. Якщо б величина |
R20b (або |
R20c |
) |
|||||||||||||||||||||||||||||
вийшла від’ємною, то слід було б змінити напрям відповідної реакції на протилежне. При цьому систему рівнянь (5.7) і (5.9) довелось розв’язувати
заново, оскільки в рівняннях (5.7) і (5.9) знак перед R20b (або R20c ) змінився б, а в рівнянні (5.8) залишається таким же через незмінність напрямку сил тертя.
Реакція на кулачок з боку стійки R10 знаходиться із співвідношення |
|
Rr10 = −Rr12 = Rr21 , а рівняння моментів для ланки 1 відносно |
точки О дає |
тотожність |
|
T1 − I1ε1 − R12 h12 = 0, |
(5.11) |
якщо закон руху початкової ланки, прийнятий при визначенні сил інерції, відповідає заданим зовнішнім силам.

119
Кут тиску і ККД
Кутом тиску на ланку і збоку ланки j називається кут ϑij між
напрямком сили тиску (нормальної реакції) на ланку і збоку ланки j і швидкістю точки прикладення цієї сили. Коли розглядається лише один кут тиску, індекси в позначеннях пропускаються. Наприклад, при синтезі
кулачкового механізму має значення тільки кут тиску ϑ21 , який позначається через ϑ .
Зі збільшенням кута ϑ збільшуються складові R20b і R20c . Відповідно
зростають втрати потужності на тертя. При великих значеннях кута тиску можливе навіть самогальмування. Воно настає при умові, якщо знаменник в (5.10) перетворюється в нуль, тобто при
tgϑ = |
l |
|
f (l +2z). |
(5.12) |
ККД механізму вираховується за б.м. відрізок часу, як миттєвий ККД у
вигляді
η = T10 ,
T1
де T10 - момент рушійних сил без урахування сил тертя; T1 - те ж з урахуванням сил тертя без урахування сил інерції.
T1 = |
|
F2 h12 |
|
|
|
; |
T10 = |
F h |
(f = 0). |
|
|
|||
|
|
|
|
|
|
2 12 |
|
|
||||||
|
|
2z |
|
|
|
|||||||||
cosϑ − f |
|
cosϑ |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||
|
1+ |
|
|
sinϑ |
|
|
|
|
|
|
|
|||
|
l |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2z |
|
|
|
|
|
Тоді |
|
|
η12 =1 |
− f 1 |
+ |
|
tgϑ, |
|
(5.12*) |
|||||
|
|
l |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
звідси одержуємо, що коли η12 |
= 0 , то настає самогальмування tgϑ = |
l |
||||||||||||
|
, |
|||||||||||||
f (l +2z) |
||||||||||||||
що співпадає з (5.12).
Вибір допустимого кута тиску
Розрізнюють два основних випадків допустимого кута тиску в кулачкових механізмах:
120
1)ставиться вимога одержати малі габарити механізму;
2)ставиться вимога одержати високий ККД. Для одержання малих габаритів необхідно зменшувати початковий радіус R0 . Але при цьому, згідно з (5.5) збільшується кут тиску і ростуть реакції в кінематичних парах. Цей ріст реакцій можна оцінити коефіцієнтом росту реакцій
ξ = |
R21 |
, |
(5.13) |
|
F |
||||
|
|
|
де R21 - модуль реакції на ведений штовхач з боку кулачка, чи ролика; F = F2 +m2 a2 - модуль сили опору, яка діє на штовхач (включаючи і
силу інерції).
З урахуванням (5.10), маємо
ξ = |
|
1 |
|
|
. |
(5.14) |
|
l + |
2z |
||||||
|
|
||||||
|
cosϑ − f |
|
|
sinϑ |
|
|
|
|
l |
|
|
|
|||
|
|
|
|
|
|
||
Звідси, задавшись граничним значенням коефіцієнта росту зусиль ξmax , одержуємо рівняння для визначення допустимого кута тиску
|
|
cosϑmax − f |
l +2z |
sinϑmax = |
|
1 |
. |
(5.15) |
|||
|
|
|
|
|
|||||||
|
|
|
|
|
l |
|
ξmax |
|
|||
Наприклад, при ξmax = 2, |
f |
= 0, z = 0, |
одержуємо ϑдоп |
= 600 ; при |
|||||||
ξmax = 2, f |
= 0,3 і z = 0 |
одержуємо |
ϑдоп = 440 |
і т.д. |
|
|
|
|
|||
Для |
одержання |
достатньо |
високого ККД при |
невеликих |
габаритах |
||||||
необхідно вибрати оптимальне значення миттєвого ККД, |
позначеного ηопт , і |
||||||
підставивши це значення в (5.12*) при ϑ =ϑдоп : |
|
|
|
||||
l +2z |
|
|
|||||
ηопт =1− f |
|
|
|
tgϑдоп . |
|
||
|
l |
|
|||||
|
|
|
|
||||
Звідки |
|
|
|
|
|
|
|
tgϑдоп = |
|
1−ηопт |
|
||||
|
|
|
. |
(5.16) |
|||
|
l + |
2z |
|||||
|
|
f |
l |
|
|
||
|
|
|
|
|
|||