

RGTA
.pdf§2. Абсолютная производная векторных и тензорных |
|
полей.Параллельный перенос и геодезические линии |
91 |
5) Решение системы.
Прежде всего заметим, что система имеет решения: u1 = const, u2 =
ϕ(t). В самом деле, если u1 = const, |
du1 |
= |
d2u1 |
= 0 и первое уравне- |
dt |
dt |
ние системы становится тождеством, а второе уравнение принимает
вид: ddt2u22 − u12 ( dudt2 )2 = 0, из которого следует, что u2 = ϕ(t), где ϕ(t)
– решение этого уравнения. Полагая r = ϕ(t), мы получаем уравнения геодезических u1 = const, u2 = r, откуда мы видим, что геодезические линии суть прямые, параллельные оси u2. Проверьте, что ϕ(t) = C2eC1t. Пусть теперь dudt1 6= 0. Тогда существует функция t = t(u1) и мы можем считать u2 = u2(t(u1)) функцией от u1. Найдем формулы, связывающие производные от u2 по t и производные от u2 по u1.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
du2 |
|
|
|
du2 du1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
du1 |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
du |
2 |
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
d u |
|
|
|
= |
|
|
d u |
|
+ |
|
|
|
|
|
d u |
|
|
|
|
|
= |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt2 |
|
2 |
|
du1 |
|
|
|
|
dt2 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
du1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
d2u2 |
du1 |
|
|
2 |
|
|
|
du2 |
2 du1 du2 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
du12 |
dt |
|
du1 |
u2 |
|
|
dt |
dt |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
du1 |
|
|
|
|
2 |
|
|
|
d2u2 |
|
|
|
|
|
2 du2 |
2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
" |
|
|
|
|
+ |
|
|
|
|
|
|
# . |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
dt |
|
|
|
du12 |
u2 |
|
du1 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
Выражения для |
du2 |
|
из и для |
d2u22 подставим во второе уравнение |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
системы. Получим |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
du1 |
2 |
|
|
|
|
d2u2 |
2 du2 |
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
" |
|
|
+ |
|
|
|
|
|
|
+ |
|
|
# = 0. |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
dt |
du12 |
u2 |
|
du1 |
u2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Откуда следует, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
d2u2 |
2 |
|
|
du2 |
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
du1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
+ |
|
|
|
|
+ |
|
= 0, |
|
поскольку |
|
|
|
|
6= 0. |
||||||||||||||||||||||||||||||||||||||||||||||||
|
du12 |
u2 |
du1 |
u2 |
|
dt |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Сделаем замену |
du12 |
|
= p(u2). Тогда |
|
d2u22 |
= p′ du12 |
= pp′, и исходное |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
du |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
du1 |
|
|
|
|
|
|
|
|
|
du |
|
|
|
|
|
||||||||||||
уравнение примет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
pp′ + |
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pp′ |
|
|
|
|
|
1 |
|
|
|||||||||||||||
|
|
p + |
|
= 0 |
|
|
|
|
или |
|
|
|
|
|
|
|
= − |
|
. |
|||||||||||||||||||||||||||||||||||||||||||||
|
u2 |
u2 |
|
|
|
|
|
|
|
|
|
p2 + 1 |
u2 |
|||||||||||||||||||||||||||||||||||||||||||||||||||

92 |
|
|
|
|
|
Глава III. РИМАНОВА ГЕОМЕТРИЯ |
|||||||||||||
Интегрируя, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ln(p2 + 1) = −2 ln u2 + ln C1 |
|||||||||||||||||||
|
|
|
|
|
p2 + 1 = |
C1 |
2 |
, |
|
|
|
||||||||
|
|
u2 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
p2 |
|
|
|
C1 2 |
|
1 = |
C1 − (u2)2 |
, |
|||||||||||
|
|
|
|
|
|
|
|||||||||||||
− u2 |
− |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
(u2)2 |
|
||||||||||
|
|
|
|
du2 |
|
|
|
|
|
|
|
|
|
||||||
p2 |
|
|
|
|
|
|
|
C1 − (u2)2 |
. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
− du1 − s |
|
|
(u2)2 |
|
|||||||||||||
Возвращаясь к исходной переменой, имеем |
|
||||||||||||||||||
|
|
|
|
|
u2du2 |
|
= du1, |
|
|||||||||||
|
|
|
p |
|
|
|
|||||||||||||
|
|
|
C1 − (u2)2 |
|
|||||||||||||||
p |
C1 − (u2)2 |
= −u1 + C2, |
|
||||||||||||||||
2 2 |
|
|
|
|
|
1 |
|
2 |
|
|
|
||||||||
C1 − (u ) = (u |
|
− C2) , |
|
||||||||||||||||
(u2)2 + (u1 − C2)2 = C1.
Таким образом, мы получили, что геодезическим и линиям в заданной метрике являются прямые параллельные оси u2 и окружности
сцентром в любой точке оси u1 и любого радиуса.
6)Параллельное перенесение. Напишем уравнения параллельного переноса вдоль кривой u1 = cos t, u2 = sin t. Пусть λ(t) : (λ1(t), λ2(t)) – поле параллельных векторов вдоль кривой γ с начальными условиями
λ1(π/2) = 0, λ2(π/2) = 1. Тогда
|
dλ1 |
1 |
|
|
du2 |
1 |
|
2 du1 |
||||||||
|
|
|
+ 12 |
λ |
|
|
|
+ 21 |
λ |
|
|
|
= 0, |
|||
|
dt |
|
dt |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
||||||
dλ2 |
2 |
|
1 du1 |
2 |
|
|
2 du2 |
|||||||||
|
|
|
+ 11 |
λ |
|
|
|
+ 22 |
λ |
|
|
= 0. |
||||
|
dt |
|
dt |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
||||||
Подставив в выражения для 112, 121, 222, получим
|
dλ1 |
− |
1 |
(λ1 cos t − λ2 sin t) = 0, |
|||||||
|
dt |
u2 |
|||||||||
dλ2 |
1 |
1 |
1 |
|
2 |
|
|||||
|
+ |
|
|
λ (− sin t) − |
|
λ |
|
cos t = 0. |
|||
dt |
u2 |
|
u2 |
|
|||||||

§3. Основная лемма римановой геометрии |
93 |
Решение этой системы уравнений дает нам поле векторов параллельных вдоль кривой γ. Но поскольку кривая γ : (u1)2 + (u2) = 1 есть геодезическая линия, то нам достаточно построить поле векторов постоянной длины, образующих с касательными векторами к кривой γ постоянный угол. касательный вектор r к кривой γ в точке γ(t) имеет компоненты – sin t, cos t. Условие ортогональности двух векторов λ(t) и τ(t) в нашем случае запишется таком виде
1 |
|
[−λ1 sin t + λ2 cos t] = 0 |
|
|
|
|
|
|
sin2 t |
||
Следовательно, мы можем положить λ1 = α(t) cos t, λ2(t) = α(t) sin t. |
|||
Функцию α(t) мы найдем из условия: |λ| = |λ0|. Это условие запишется в таком виде.
(λ1(t))2 + (λ2(t))2 |
= |
1 |
. |
sin2 t |
1 |
Подставим в это равенство λ1 = α(t) cos t и λ2 |
(t) = α(t) sin t. Получим |
|||
|
α2(cos2 t + sin2 t) |
= 1. |
|
|
|
sin2 t |
|
|
|
Откуда α(t) = sin t и λ1(t) = sin t cos t, |
λ2 |
(t) = sin2 t. Итак, поле |
||
векторов, заданное функциями sin t cos t, |
sin2 t есть поле параллель- |
|||
ных векторов вдоль кривой γ : u1 = cos t, |
u2 = sin t. Проверьте, что |
|||
функции sin t cos t, sin2 t удовлетворяют системе уравнений. |
||||
Основные дифференциальные операторы: gradf, divλ, rotλ и f в римановом пространстве определяются теми же формулами, что и в евклидовом пространстве в криволинейных координатах.
gradf = ( |
∂f |
, ..., |
|
∂f |
); |
|
|
|
divλ = |
|
∂λi |
+ kii |
λk, |
||||
|
|
|
|
|
|
∂ui |
|||||||||||
|
∂u1 |
|
|
|
∂un |
|
|
|
|
|
|
|
|
||||
|
|
|
ik |
|
|
|
|
ik |
|
∂µi |
|
r |
|
|
|||
rotµ = g |
|
µik = g |
|
|
( |
|
− ikµr), |
|
|||||||||
|
|
|
∂uk |
|
|||||||||||||
|
f = gik |
|
∂2f |
|
|
− gik ikr |
|
∂f |
|
|
|||||||
|
|
|
|
. |
|
||||||||||||
|
∂ui∂uk |
∂ur |
|
||||||||||||||
§3 Основная лемма римановой геометрии
Определение 3.3.1. Связность на многообразии M называ-
ется симметричной, если она удовлетворяет тождеству |
|
uv − vu = [u, v]. |
(III.1) |
94 |
Глава III. РИМАНОВА ГЕОМЕТРИЯ |
Заметим, что условие (III.1) равносильно ∂i ∂j = ∂j ∂i или
sij = sji.
Определение 3.3.2. Тензором кручения для произвольных векторных полей называется билинейный функционал T (u, v) = uv −
vu − [u, v]
Упражнение. Проверить, что T (u, v) – тензор. Упражнение. Определить координаты тензора кручения.
Определение 3.3.3. Говорят, что связность совместна с метрикой (M, g), если g = 0, т.е. для любого векторного поля ω ковариантная производная wgij = 0.
Теорема 3.3.1. Следующие условия эквивалентны:
1)wgij = 0 для всех w;
2)dtd hv(t), wti для всех γ(t) C1, что γ˙ v = γ˙ w = 0;
3)dtd hv(t), wti = hγ˙ v, wi + hv, γ˙ wi
Теорема 3.3.2 (Основная лемма римановой геометрии). На каждом римановом многообразии существует, и притом единственная, симметричная связность, согласованная с его метрикой.
Определение 3.3.4. Связность, удовлетворяющая условиям основной леммы римановой геометрии называется связностью ЛевиЧивита.
§4 Риманов тензор кривизны. Различные типы кривизн
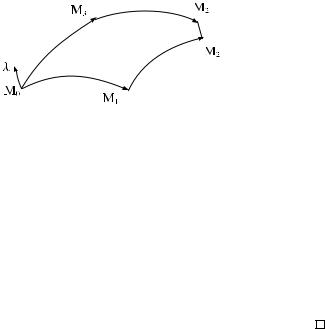
Теорема 3.4.1. Рассмотрим поверхность ui = ui(v1, v2), где функции ui(v1, v2) принадлежат классу C3. Замкнутый контур опреде-
e
лим точками: M0(0, 0), M1(ε, 0), M2(ε, ε), M3(0, ε). Вектор λ есть результат параллельного перенесения вектора λ вдоль контура M0M1M2, вектор λ есть результат параллельного перенесения вектора λ вдоль контура M0M3M2. Тогда
|
λ |
λ = Ri |
λkε + o(ε2), |
|
|||
где |
e − |
|
|
kmj |
|
|
|
i |
∂ jki |
∂ mki |
i l |
i l |
|
||
Rkmj = |
|
− |
|
+ ml jk |
− jl mk. |
(III.2) |
|
∂um |
∂uj |
||||||
§4. Риманов тензор кривизны. Различные типы кривизн |
|
|
95 |
|
|
|||||||||||||||||||
Доказательство. I. Фиксируем систему локальных координат {∂k} |
|
|
|
|||||||||||||||||||||
и перенесем вектор λ по контуру M0M1M2. Результат перенесения |
|
|
||||||||||||||||||||||
обозначим через λ = TM0 M1M2 = τ2(τ1(λ)), где τ1(λ) есть перенос λ по |
|
|
||||||||||||||||||||||
M |
|
M |
|
, τ (τ (λ)) – перенос τ1(λ) по M1M2. |
|
|
|
|
|
|
|
|
|
|||||||||||
|
0 |
|
1 |
|
2 1 |
k e |
k |
|
∂λk |
j |
|
|
2 |
k |
|
k |
j |
|
2 |
|
|
|
|
|
|
|
Имеем τ1(λ) |
= λ |
|
− ε |
∂u1 |
(x)λ + o(ε |
|
) = λ |
− ε 1j(x)λ |
+ o(ε |
|
). |
|
|
|||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
λ = τ2(τ1(λ))k = |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
k |
k |
|
j |
e2 |
|
|
k |
|
|
k |
|
∂ 2kj |
! τ1 |
j |
|
|
|
2 |
|
|
= τ1(λ) |
−ε 2j(y)τ1(λ) +o(ε |
) = τ1(λ) |
|
−ε 2j(x) + ε |
∂u1 |
(λ) +o(ε |
|
) = |
||||||||||||||||
λk − ε 1kj + 2kj |
λj + ε2 − |
k |
λj + o(ε2). |
|
∂ 2j |
+ 2ks 1sj |
|||
∂u1 |
||||
II.Перенесем вектор λ по контуру M0M3M2:
λ= TM0M3 M2 = τ4(τ3(λ)), где τ3(λ) – есть перенос λ по M0M3,
τ4(τ3(λ)) – перенос τ3(λ) по M3M2. Аналогично, получаем
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|||
|
λ = λk − ε 2kj + 1kj λj + ε2 − |
∂ 1j |
+ 1ks 2sj λj + o(ε2). |
|
|||||||||||||||||
|
∂u2 |
|
|||||||||||||||||||
|
|
|
|
|
|
III. Таким образом, |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
k |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
λ − λ = ε2 − |
∂ 2j |
+ |
∂ 1j |
+ 2ks 1sj − 1ks 2sj λj + o(ε2). |
|
|
||||||||||||||
|
∂u1 |
∂u2 |
→ |
|
|||||||||||||||||
|
e |
|
|
|
|
|
|
|
|
|
|
|
→ |
j, 2 |
→ |
m, k |
→ |
i, j |
k, |
||
|
Откуда, с помощью смены индексов 1 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
∂ mki |
∂ jki |
|
|
заключаем |
|
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
|
i s |
|
i |
|
s |
|
k |
2 |
|
|
|
|
||||
λ − λ = ε |
|
− |
|
+ |
|
+ ms jk − |
js |
mk λ + o(ε |
) |
|
|
|
|||||||||
|
∂uj |
∂um |
|
|
|
||||||||||||||||
e |
Определение 3.4.1. Тензор Rkmji |
, определяемый равенством (III.2), |
|||||||||||||||||||
называется римановым тензором кривизны.
Замечание. Если в (III.2) опустить верхний индекс, то получим
Rhkmj = ghiRkmji .
Замечание. Для TM0 M1M2 (λ) и TM0M3 M2 (λ) из теоремы 3.4.1 верно
TM0M1 M2 (λ) − TM0M3 M2 (λ) = ( ∂2 ∂1 − ∂1 ∂2 )λε2 + o(ε2).

96 |
Глава III. РИМАНОВА ГЕОМЕТРИЯ |
Теорема 3.4.2. Значение R(u, v)w в точке x зависит лишь от значений u, v, w в точке x, а не от их значений в близких точках. Отображение R : TxM × TxM × TxM → TxM трилинейно.
Другими словами, теорема утверждает, что Rijkl – тензор, где (R(u, v)w)l = Rijkl uivj wk и Rijkl определяется равенством (III.2).
Теорема 3.4.3. Тензор кривизны риманова многообразия удовлетворяет следующим следующим соотношениям:
1.R(u, v)w + R(v, u)w = 0.
2.Если T = 0, то R(u, v)w + R(v, w)u + R(w, u)v = 0.
3.Если g = 0, то hR(u, v)w, zi + hR(u, v)z, wi = 0.
4.Если T = 0 и g = 0, то hR(u, v)w, zi = hR(w, z)u, vi.
Теорема 3.4.4. Имеет место второе тождество Бианки
Rjkl,mi + Rjlm,ki + Rjmk,li = 0 или |
Rji[kl,m] = 0. |
(III.3) |
Следствие 3.4.1. Справедливо первое тождество Бианки |
|
|
Rjkli + Rklji + Rljki |
= 0. |
(III.4) |
Следствие 3.4.2. |
|
|
gjkRjkli = gjkgisRsjkl = gjkgisRjslk = gisRsl = Rli.
Из второго тождества Бианки с помощью свертки по i и m получаем
Следствие 3.4.3.
Rjkl,ii = Rjk,l − Rjl,k.
Из последних двух следствий вытекает
Следствие 3.4.4.
2Rl,ii = R,l, где R = gjkRjk.
Лемма Шура. Если Kσ(p) = K для любой двумерной площадки σ, то Kσ = K для любой точки p.

§4. Риманов тензор кривизны. Различные типы кривизн |
|
97 |
||||||||
Определение 3.4.2. Пусть ξij |
есть простой бивектор в точке |
|||||||||
p, определенный векторами λ : (λi); |
µ : (µj ). Тогда число |
|
|
|
||||||
Kσ = |
Rhkmj ξhkξmj |
|
|
|
= |
|
Rhkmj λhµkλmµj |
|
. |
|
(ghmgkj − ghjghm)ξ |
hk |
ξ |
mj |
|
h |
k m |
j |
|||
|
|
|
|
|
(ghmgkj − ghjgkm)λ µ |
λ µ |
|
|
||
называется римановой секционной кривизной в точке p и в двумерном направлении σ, где σ есть плоскость, определенная векторами λ и µ.
Замечание 3.4.1. В двумерном случае формула упрощается
R1212
Kσ = g11g22 − g122
и число Kσ, как можно доказать, совпадает с гауссовой кривизной поверхности в точке p.
Теорема 3.4.5. Если Kσ = 0 для всех точек и для всех двумерных направлений, то риманово пространство является локально евклидовым. Если же для всех точек и для всех двумерных направлений Kσ = +1 (−1), то пространство является локально сферическим (локально изометричным пространству Лобачевского).
Определение 3.4.3. Тензор rij , полученный операцией свертки из риманова тензора кривизны
rij = Rijll ,
называется тензором Риччи.
Определение 3.4.4. Кривизной Риччи Kr(λ) в направлении вектора λ : (λi) в точке p называется число, определенное формулой
Kr = rij λiλj .
Определение 3.4.5. Скалярной кривизной s в точке p называется число, равное s = gij rij .
Упражнение. Доказать, что если в каждой точке поверхности совершено гомотетическое преобразование, т.е. g1 = λg, то выполняются
1)K1 = λ−1K,
2)r1 = λ−1r,
3)s1 = λ−1s.

98 |
Глава III. РИМАНОВА ГЕОМЕТРИЯ |
§5 |
Структурные уравнения Картана |
Пусть {X1, ..., Xn} – базис векторных полей в окрестности U с локальными координатами {xi}. Тогда из разложения по базису имеем
X |
ijk Xk, T (Xi, Xj ) = |
X |
Tijk Xk, |
||
Xi Xj = |
|
||||
k |
X |
|
|
k |
|
|
|
|
X |
||
R(Xi, Xj )Xl = |
Rlijk Xk, |
[Xj , Xk] = |
cjki Xi, |
||
|
k |
|
X |
|
i |
|
|
|
|
|
|
wi(Xj ) = δi |
, wi |
= i |
wk. |
|
|
|
j |
j |
kj |
|
|
k
Фиксируем базис dxi и рассмотрим 1-форму w = wkdxk на U M и векторные поля X, y X(M). Тогда, в этих обозначениях, справедливы
Лемма 3.5.1.
2dw(X, Y ) = X(wY ) − Y (wX) − w([X, Y ]).
Для дальнейшего изложения совершим замену переменных
X → Xi, Y → Xj
Лемма 3.5.2.
dwi(Xj , Xk) = − 12 cijk.
Лемма 3.5.3.
Tjki = ijk − ikj − cijk.
Доказательство. По определению тензора кручения находим
T (Xj, Xk) = Xj Xk − Xk Xj − [Xj , Xk] = ( ijk − ikj − cijk)Xi.
Теорема 3.5.1. (Э.Картан) |
|
|
|
X |
|
|
|
|
|||||
|
i |
= − |
X |
i |
w |
p |
|
1 |
i |
j |
w |
k |
|
|
|
|
|
||||||||||
dw |
|
|
wp |
|
+ |
|
|
Tjkw |
|
|
|||
|
p |
|
2 |
i,k |
|
|
|||||||

§6. Полные римановы многообразия |
99 |
|||||||||||||
Доказательство. Замечаем, что |
|
|
||||||||||||
|
|
|
X |
1 |
|
X |
|
|
||||||
(− |
|
wpi wp)(Xj , Xk) = − |
|
|
|
|
{wpi (Xj )wp(Xk) − wp(Xj )wpi (Xk)} = |
|||||||
p |
2 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
1 |
{ kji − jki }. |
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
2 |
|
||||||
Аналогично |
|
|
X |
|
|
|||||||||
1 |
|
X |
Trsi wr ws)(Xj , Xk) = |
1 |
( rsi − sri − crsi )(δjr δks − δjsδkr ) = |
|||||||||
( |
|
|
|
|
|
|
||||||||
2 |
|
r,s |
4 |
r,s |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
( jki − kji − cjki ). |
|
||||||||
|
|
|
|
= |
|
|
||||||||
|
|
|
|
2 |
|
|||||||||
Сумма полученных равенств дает требуемое.
Упражнение. Проверить, что компоненты тензора кривизны определяются равенствами
X |
|
|
X |
Rlijk = ( jlp ipk |
− − ilp jpk ) + Xi jlk − Xj ilk − cijp plk . |
||
p |
|
|
p |
Теорема 3.5.2. (Э.Картан) |
|
X |
|
X |
1 |
||
dwli = − |
wpi wlp + |
2 |
Rljki wj wk. |
|
p |
|
j,k |
§6 Полные римановы многообразия
Пусть M – связное риманово многообразие.
Определение 3.6.1. Параметризованный путь γ : I → M, где I
– некоторый интервал действительной прямой, называется геоде-
зической, если векторное поле ускорения dtD dγdt тождественно равно нулю.
В локальных координатах u1, u2, . . . , un, кривая t → γ(t) M определяет n гладких функций u1(t), u2(t), . . . , un(t), а уравнение геодези-
ческой D dγ dt dt
d2uk |
+ ijk |
dui duj |
|||
|
|
|
|
= 0. |
|
dt2 |
dt |
dt |
|||
100 Глава III. РИМАНОВА ГЕОМЕТРИЯ
Таким образом, существование геодезических определяется существованием решений некоторой системы дифференциальных уравнений второго порядка. И согласно известной теоремы теории дифференциальных уравнений для заданных p M, v TpM и t0 R ло-
кально существует геодезическая, удовлетворяющая условиям γ(t0) =
p, dγdt (t0) = v.
Итак, пусть v TpM – касательный вектор, и существует геодезическая
γ : [0, 1] → M,
удовлетворяющая условиям
γ(0) = p, dγdt (0) = v.
Точку γ(1) M обозначим через expp(v) и назовем экспонентой касательного вектора v TpM. Тогда геодезическая γ может быть записана в виде
γ(t) = expp(tv).
Определение 3.6.2. Риманово многообразие M геодезически полно, если экспоненциальное отображение expp(v) определено для всех точек p M и всех векторов v TpM.
Очевидно, что это эквивалентно следующему требованию. Каждый отрезок геодезической γ0 : [a, b] → M продолжается до бесконечной геодезической γ : R → M.
Примерами геодезически полных римановых многообразий слу-
жат: сфера, цилиндр, евклидова плоскость.
Упражнение. Привести пример многообразия, не являющегося геодезически полным.
Определение 3.6.3. Геодезическая γ0 : [a, b] → M называется минимальной, если она не длиннее никакой кусочно-гладкого пути, соединяющего его концы.
Определим расстояние ρ(p, q) между двумя точками p, q M как точную нижнюю грань длин кусочно-гладких дуг, соединяющих эти точки. Очевидно, что при этом M становится метрическим пространством, и эта метрика совместна с обычной топологией на M.
Теорема 3.6.1. (Хопф-Ринов)Пусть M – гладкое полное риманово многообразие. Тогда справедливы следующие утверждения:
1) любые две его точки могут быть соединены минимальной геодезической;