

16. Амплитудный метод измерения угла. Принцип, варианты построения аппаратуры, сравнение точности различных вариантов.
Применяются два варианта построения угломерных устройств: измерители направления прихода электромагнитной волны, и тогда говорят о пеленгаторах источников излучения, и устройства, задающие направление в пространстве, такое устройство называется радиомаяком. В любом случае направлению соответствует конкретное значение одного из параметров сигнала.
Предполагается прямолинейное распространение волны, в этом случае измеренный или заданный углы совпадают с интересующими углами на плоскости или в пространстве. В любом случае угол определяется как нормаль к фазовому фронту, а определить её можно лишь путём анализа фронта в двух или более точках. Такой анализ производит антенное устройство, имеющее некоторые пространственные размеры. Принцип взаимности, свойственный антеннам, определяет одинаковость характеристик устройств типа пеленгаторов и типа маяков.
Амплитудный метод построения угломерных устройств в качестве информативного параметра принимает амплитуду сигнала. Метод реализуется с помощью направленных антенн, у которых амплитуда выходного сигнала или напряжённости поля является функцией угла. Именно эта зависимость называется диаграммой направленности антенны. В качестве рабочих точек выбираются характерные точки диаграммы направленности. В соответствии с этим названы и используются следующие варианты определения или задания угла: максимального сигнала, минимального сигнала и сравнения сигналов.
17. Частотный метод измерения разности расстояний в радионавигации. Принцип построения измерителя, характеристики сигналов, структурная схема.
Разностно-дальномерное устройство состоит из двух радиопередатчиков (реже радиоприёмников), расположенных в точках с известными координатами и образующих базу устройства. Передатчики (радиомаяки) работают совместно и излучают синхронные или синфазные сигналы. В приёмной точке информация о моменте излучения отсутствует, поэтому временной интервал или разность фаз между принятыми сигналами определяется не абсолютными значениями расстояний, а их разностью. Оценка разности расстояний и использование полученной информации производятся в приёмной точке, т. е. на корабле. Если базу образуют приёмные установки, то в третьей точке располагается передатчик. Разность расстояний от передатчика измеряется в одной из приёмных точек, для этого необходимо обеспечить передачу в измерительную точку второго сигнала. Время трансляции должно быть учтено.
Частотный метод предполагает излучение частотно-модулированных сигналов. Закон изменения частоты – линейный, однако может быть гармоническим. Параметры модуляции (девиация и период) должны быть строго одинаковыми во всех точках излучения, причём начала изменения частоты – синхронными. Осуществляется это путём передачи модулирующего сигнала по специальным линиям или же путём введения принципа ведущая плюс ведомая станция.
На борту принимаются два ЧМ-сигнала, временной сдвиг частот которых определяется разностью расстояний. О временном сдвиге судят по текущей разности частот. Пересчёт разности частот в разность расстояний двухэтапный – через параметры модуляции и скорость света:
![]() где
∆f – измеренная разность частот, fдев
– девиация частоты, T – период модуляции,
c – скорость света.
где
∆f – измеренная разность частот, fдев
– девиация частоты, T – период модуляции,
c – скорость света.
Как и при измерении дальности подвижность приёмной точки приводит к смещению одного из графиков по оси частот и к различию мгновенных разностей частот на этапах нарастания и убывания частоты. Однако в рассматриваемых устройствах отмеченный эффект определяется не абсолютными значениями радиальных скоростей корабля относительно радиомаяков, а их разностью.
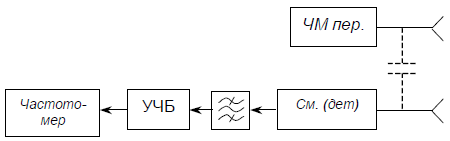
Разница частот выявляется как частота биений при подаче на нелинейный элемент (смеситель, детектор) принятого и зондирующего сигналов, ∆f = fб.
На рисунке УЧБ - усилитель частоты биений. Частота биений измеряется частотомером. По ней находится дальность до объекта наблюдения.
Закон изменения частоты излучаемых колебаний может быть различным, в частности гармоническим или пилообразным. Изменение частоты обязательно должно быть знакопеременным, так как частота - ограниченный природный ресурс.