

9. Системы координат, используемые в навигации при местоопределении на Земле (топоцентрическая, географическая, геоцентрическая и геоцентрическая инерциальная).
Решение навигационных задач производится в различных системах координат, причём каждая задача может быть решена в нескольких системах. Выбирается такая система, в которой аналитические выражения для описания траектории движения и процесса управления, да и само управление, будут наиболее простыми. Основными являются следующие системы координат.
Горизонтальная топоцентрическая система координат, в которой работают радиолокационные станции аэропортов, пунктов УВД и УДС и т.д. Начало системы располагается в месте нахождения РЛС, отсчётная плоскость – горизонтальная, начальное направление – на север. Координаты корабля (цели): дальность, азимут (угол в горизонтальной плоскости от севера до проекции направления на корабль, отсчитываемый по часовой стрелке) и угол места (иногда – угол высоты) – угол в вертикальной плоскости от горизонта до направления на цель.
Географическая система координат, в которой обычно решается основная навигационная задача. Систему можно считать геоцентрической, поскольку координаты корабля определяются двумя углами: широтой и долготой для двумерного случая навигации на земной поверхности. В трёхмерном случае к углам добавляется высота над земным геоидом. Широта отсчитывается от экватора: северная (положительная) и южная (отрицательная) в пределах 0–90 градусов. Долгота измеряется в плоскости экватора от Гринвичского меридиана в восточном направлении в пределах 0–180 градусов.
Геоцентрическая экваториальная инерциальная система координат, которая используется для описания траекторий ИСЗ. Это ортогональная система с началом в центре Земли и отсчётной плоскостью, проходящей через экватор. Ось x направлена в точку весеннего равноденствия и неподвижна относительно звёзд. Ось y также лежит в плоскости экватора, ось z идёт в направлении северного полюса.
10. Погрешности измерения навигационных величин, вызываемы проводимостью почвы. Эффект «береговой рефракции».
При расчете дальности действия РТС в общем случае надо учитывать влияние сферичности Земли и отражений радиоволн от её поверхности. Влияние сферичности Земли зависит от рефракции радиоволн в тропосфере. Для упрощения расчетов считают Землю плоской, что допустимо, если расчетная дальность действия значительно ниже дальности прямой радиовидимости.
15. Амплитудный метод измерения расстояния. Принцип и структурная схема дальномера.
Измерение расстояния возможно путём снятия информации, связанной с ним, с любого из четырёх параметров радиосигнала и последующего пересчёта значения параметра в расстояние. Амплитудный метод позволяет производить однократное измерение расстояния (на пути передатчик – приёмник).
Амплитудный метод основан на свойстве электромагнитного поля распространяться сферической волной в свободном пространстве, когда плотность потока мощности поля обратно пропорциональна квадрату расстояния. Этот закон в аналитической форме может быть записан в виде:

При распространении в реальной среде в формулы в качестве дополнительного коэффициента в правой части вводится соответствующий множитель ослабления. Именно зависимость указанных характеристик поля от множителя ослабления, который определяется с большой погрешностью, приводит к низкой точности метода и отсутствию разработок на его основе.
Структурная схема
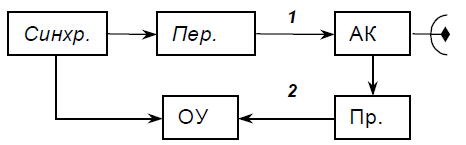
На схеме АК - антенный коммутатор, ОУ - оконечное устройство.
Излучаемую последовательность импульсов обычно считают периодической, хотя принципиальной необходимости периодичности излучения нет. Поскольку прием и передача импульсов разделены по времени, одна антенна используется и на передачу и на приём. Переключение прием-передача осуществляется антенным коммутатором АК, который должен надёжно закрывать приёмник на время передачи и не допустить шунтирования цепей приемника передатчиком во время приема.