

1.30. Центр тяжести твёрдого тела
В инженерной практике часто требуется определить положение центра тяжести тела или механической системы. Рассмотрим методику решения таких задач.
В теоретической механике тело рассматривают как непрерывную совокупность материальных точек. Если тело находится вблизи земной поверхности, то к каждой материальной точке Ci этого тела приложена её сила тяжести GCi. Эти силы тяжести приближенно образуют систему параллельных сил (линии действия сил тяжести двух материальных точек, находящихся на земной поверхности и отстоящих друг от друга на расстоянии 31 м, образуют угол, равный одной секунде).
И
Рис. 1.78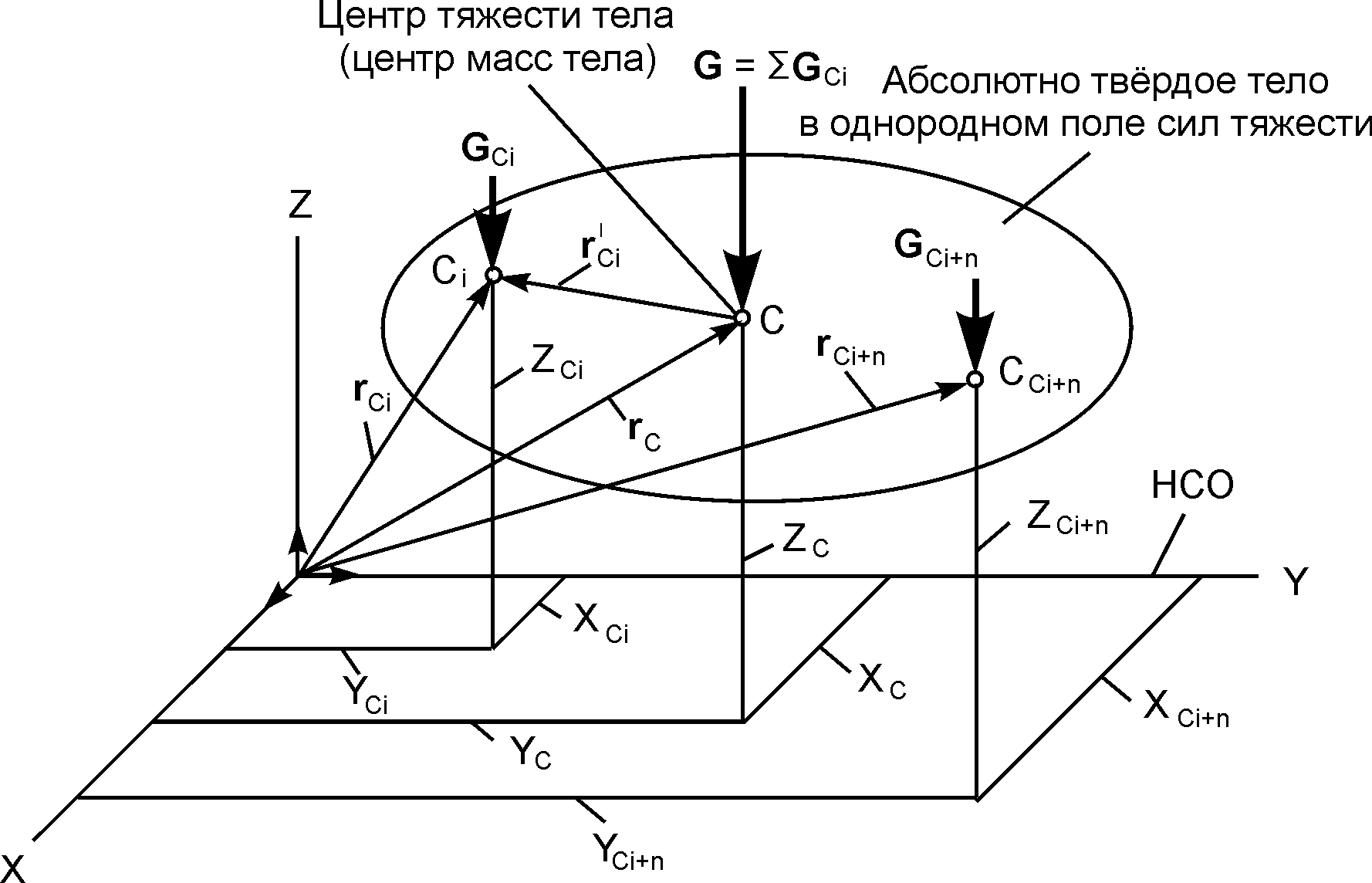
На
рис. 1.78 использованы следующие обозначения:
С – центр тяжести тела; Ci,
Ci+n
– материальные точки тела; XCi,
YCi,
ZCi,
XCi+n,
YCi+n,
ZCi+n
– координаты материальных точек в
системе отсчёта OXYZ;
rCi,
rCi+n
– радиус-векторы материальных точек;
rC
– радиус-вектор центра тяжести тела;
XC,
YC,
ZC
– координаты центра тяжести тела; G
– сила тяжести тела;
![]() – радиус-векторi-й
точки тела (начало радиус-вектора
– радиус-векторi-й
точки тела (начало радиус-вектора
![]() находится в центре С тяжести тела).
находится в центре С тяжести тела).
Силу G = Σ GCi прикладывают в точке, которую называют центром тяжести тела. Определим это понятие.
Центр
тяжести твёрдого тела
–
геометрическая точка С, для которой
сумма произведений весов GCi
всех материальных точек, образующих
твёрдое тело, на их радиус-векторы
![]() ,
проведенные из этой точки, равна нулю.
,
проведенные из этой точки, равна нулю.
Согласно определению имеем:
![]() =
0,
=
0,
где G = Σ GCi – вес тела, равный сумме весов GCi материальных точек этого тела.
Радиус-вектор центра С тяжести тела и его координаты определяют по формулам:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Рассмотрим механическую систему, находящуюся в однородном поле сил тяжести (рис. 1.79). Под механической системой условимся понимать систему материальных тел, соединенных между собой недеформируемыми связями.
Силу тяжести GC и вес GC механической системы определяют по формулам:
GC = Σ GCi; GC = Σ GCi,
где GCi, GCi – соответственно сила тяжести и вес i-го тела, входящего в механическую систему.
Рис. 1.79
Силу тяжести GC прикладывают в центре С тяжести механической системы. Введем это понятие.
Центр
тяжести механической системы
–
геометрическая точка С, для которой
сумма произведений весов GCi
всех материальных тел, входящих в
механическую систему, на их радиус-векторы
![]() ,
проведённые из этой точки, равна нулю.
,
проведённые из этой точки, равна нулю.
Исходя из этого определения, имеем
![]() =
0.
=
0.
Очевидно, что центр тяжести тела и центр тяжести механической системы определяют по одной методике.
Радиус-вектор rC и координаты XC, YC, ZC центра тяжести механической системы определяют по формулам:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
где GCi – вес i-го тела механической системы; rCi – радиус-вектор центра тяжести i-го тела; XCi, YCi, ZCi – координаты центра тяжести i-го тела механической системы.
В динамике используют понятие центр масс механической системы. Положения центра тяжести механической системы и её центра масс совпадают. Понятие центр масс механической системы более широкое по сравнению с понятием центр тяжести механической системы. Понятие центр масс применимо для любой системы материальных точек независимо от того, находится ли она под действием каких-либо сил или нет, тогда как понятие центр тяжести применяется лишь для системы тел, находящихся в однородном поле сил тяжести.
Центр тяжести однородного тела, заполняющего некоторый объём, называется центром тяжести объёма. Его координаты находят по формулам:
![]() ;
;
![]() ;
;
![]() ,
,
где VCi – элементарный объём тела; V – полный объём тела; XCi, YCi, ZCi – координаты центра тяжести i-го элементарного объёма тела.
Таким образом, для определения положения центра тяжести однородного тела, находящегося в некотором объёме, этот объём необходимо разбить на элементарные объёмы VCi (куб, параллелепипед, призма и т. д., положения центров тяжести которых приведено в справочной документации).
Однородное тело, имеющее форму тонкой пластинки, рассматривают как материальную плоскую фигуру. Координаты центра тяжести плоской фигуры определяют по формулам:
![]() ;
;
![]() ,
,
где FCi – элементарная площадь плоской фигуры; XCi, YCi – координаты центра тяжести элементарной площади; F – площадь плоской фигуры.
Для определения положения центра тяжести плоской фигуры эту фигуру разбивают на элементарные участки площадью FCi (квадрат, прямоугольник, треугольник и т. д., положения центров тяжестей которых известны).
Аналогичным образом определяют положения центров тяжестей однородных тел, имеющих большую протяженность при сравнительно малой площади поперечного сечения (например, проволока).
![]() ;
;
![]() ;
;
![]() ,
,
где LCi – элементарная длина тела; L – полная длина тела, вытянутого в одну линию; XCi, YCi, ZCi – координаты центра тяжести i-го участка элементарной длины тела.
При определении положения центра тяжести широко используют следующие рекомендации:
если однородное тело имеет ось симметрии, то его центр тяжести лежит на этой оси;
если однородное тело имеет плоскость симметрии, то его центр тяжести находится в этой плоскости;
если плоская фигура или линия имеет ось симметрии, то её центр тяжести лежит на этой оси.
При решении некоторых задач используют методы отрицательных площадей и объёмов. Поясним это примером.
Пример.
Определить положение центра тяжести однородного диска радиусом R с круглым отверстием, радиус которого r = R/2 (рис. 1.80)
Рис. 1.80
Решение.
Заштрихованная фигура имеет ось симметрии, поэтому центр С её тяжести находится на оси ОХ. Отсюда имеем YC = 0. Координату ХС находим по формуле
![]() ,
,
где FCi – элементарная площадь плоской фигуры; XCi – абсцисса центра тяжести элементарной площади; F – площадь плоской фигуры.
Расчленим исходную фигуру на две составные части. Первая фигура – сплошной круг радиусом R. Вторая фигура – круг радиусом r. Для двух тел последняя формула принимает вид
![]() .
.
Согласно рис. 1.80 имеем:
ХС1 = 0; FC1 = (π·R2)/2; XC2 = R/2; FC2 = – (π·r2)/2.
Следует отметить, что FC1 > 0, а FC2 < 0. При наложении площадей FC1, FC2 друг на друга получим исходную площадь фигуры.
Учитывая, что r = R/2 и произведя вычисления, получим
XC = – R/6.
Следует отметить, что координата ХС центра тяжести отрицательна. Найденное значение ХС покажем на рис. 1.80.
Выполнение курсовых заданий на определение координат центра тяжести тела для студентов заочной и дистанционной форм обучения не предусмотрено. Однако такого типа задачи включены в дидактические единицы интернет-экзамена. Рассмотрим один из примеров решения задачи на определение координат центра тяжести.
Пример.
Н
Рис. 1.81
Решение.
Р
Рис. 1.82
Первый участок имеет длину LC1 = 2 м. Координаты центра С1 его тяжести соответственно равны: XC1 = 1 м; YC1 = 0 м. Второй участок имеет длину LC2 = 10 м. Координаты центра С2 тяжести этого участка соответственно равны: XC1 = 2 м; YC1 = 5 м.
Определим координаты центра тяжести линии по формулам:
![]() =
=
![]() = 1,833 м;
= 1,833 м;
![]() =
=
![]() = 4,166 м.
= 4,166 м.
Покажем положение центра С тяжести линии на рис. 1.82.
Таким образом, задача решена, ответы получены.