

14 Дәріс. Сызықты объекттерді параметрлік идентификациялау
Дәрістің мазмұны:
- сызықты объекттерді параметрлік идентификациялау
Дәрістің мақсаты:
- сызықты объекттерді параметрлік идентификациялау әдістерін оқу (статикалық және динамикалық детерминерленген объекттер).
Сызықты немесе белгілі дәлдікпен сызықты деп есептеуге болатын объекттерді қарастырамыз. Параметрлік жағдайда модель өзінің параметрлерімен анықталады, идентификациялау процесінде оларды бағалау керек. Бағалау үшін сәйкессіздік функционалын минимумдау процедурасы қолданылады. Осы процедураны түсіну үшін әуелі статикалық детерминерленген жағдайды қарастырамыз.
14.1 Статикалық детерминерленген сызықты модельдер
n кірісі және m шығысы бар сызықты объекттің моделінің құрылымы жалғыз болады және сызықты алгебралық теңдеулер жүйесімен бейнеленеді
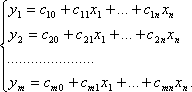
cij, i =1,..., m; j = 0,…,n коэффициенттері m(n+1) идентификацияланады
Векторлық
түрде ![]()
мұнда X
= (x1,
x2,,…,
xn) –
кіріс; Y
= (y1,
y2,,…,
yn) –
шығыс; C0 =
(c10,
…,cm0);
Объект туралы ақпаратты келесі түрде көрсетуге болады {Xj, Yj k}, k =1,…,m. C0 және C идентификацияланады.
n>1, m=1 жағдайды қарастырайық. m>1 жағдайы қарастырылатын жағдайды m рет қайталауға келтіріледі.
Сонымен, 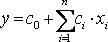 немесе
немесе
![]()
(n+1) белгісіз коэффициенттерді {Xj, Yj}, j =1,…,N, ақпарат негізінде анықтау керек, мұндағы Xj=(x1j, x2j, …, xnj) - кірістің j-ші күйі, Yj – осы кіріске жүйе реакциясы.
Бұл есепті шешудің әдеттегі амалы – объект мен модельдің шығыстарын теңестіру
![]() (14.1)
(14.1)
(n+1) белгісіздері бар N теңдеуді алдық (идентификациялау теңдеулерінің жүйесін). Бұл жүйенің жалғыз шешімі болуы үшін келесі матрицаның
|
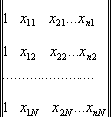 (14.2)
(14.2)
Бұл орындалуы үшін осы матрицаның (n+1) сызықты-тәуелсіз жолын табу керек. Сондықтан N жұптардан (n+1)
![]()
сызықты-тәуелсіз жолдарын таңдау керек.
Сонда (14.1) жүйенің шешімі идентификацияланатын параметрлерінің дәл мәндерін анықтайды (егер де объект нақты сызықты болса).
Бірақ біздер ақпараттың барлығын қолданған жоқпыз. Оны қолдану үшін келесі сәйкессіздік функцияны кіргізейік:
![]() (14.3)
(14.3)
мұндағы ![]() -
жергілікті сәйкессіздік функция (i-ші
жұпта).
-
жергілікті сәйкессіздік функция (i-ші
жұпта).
Енді С параметрлерді бағалау есебін (14.3) функциясын минимумдау есебі ретінде қарастыруға болады немесе келесі алгебралық сызықты жүйеге келтіруге
 (14.4)
(14.4)
Егер де (14.2) жүйесінің рангы (n+1)-ге тең болса, жүйенің детерминанты нөльге тең емес болады.
(14.1) және (14.4) жүйелердің шешімдері бірдей. Не үшін осы күрделі әдісті қолданамыз және де (14.1) тек қана (n+1) нүктені талап етеді? Қалған N – (n+1) не үшін керек? Егер де объект нақты дереминерленген және сызықты болса, онда екінші әдісті қолданбауға да болады. Бірақ объект сызықтыға жақын болуы мүмкін. Онда екі нүкте бойынша құрастырылған модель өрескел болады. Екінші әдіс объектті «тегістейді».
Егер де (14.4) жүйенің рангы (n+1)-ден кіші болса? Бұл жағдайда келесі амалдарды қолдануға болады
1) Өлшеулерді қайталау керек. Мүмкін жүйе күйлері бірінші тәжірибелерде әртүрлі болмады. Бұл амал көмектеспесе, модель құрылымын өзгерту керек.
2) Идентификацияланатын параметрлер санын азайту, яғни кірістің біреуін қарастырмау керек, мысалы, аз өзгеретін кірістің біреуін. (14.2) рангы оның өлшемімен бірдей болғанша осы амалды қайталау керек.