

11 Дәріс. Идентификациялау есебінің қойылуы
Дәрістің мазмұны:
- идентификациялау есебінің қойылуы; сәйкессіздік функционалы.
Дәрістің мақсаты:
- идентификациялау есебінің қойылуымен танысу; сәйкессіздік функционалын минимумдау әдісін оқып білу.
11.1 Идентификациялау объектісі
 Кез
келген нақты объектте шығудағы
айнымалыларға әртүрлі факторлардың
көп саны әсер етеді. Бұл факторлар
бөгеттер (шулар) немесе біз танымайтын
параметрлер болуы мүмкін. Идентификациялау
объекттің келесі түрде көрсетеміз:
Кез
келген нақты объектте шығудағы
айнымалыларға әртүрлі факторлардың
көп саны әсер етеді. Бұл факторлар
бөгеттер (шулар) немесе біз танымайтын
параметрлер болуы мүмкін. Идентификациялау
объекттің келесі түрде көрсетеміз:
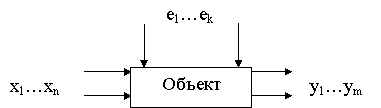
11.1 Сурет – Идентификациялау объекті
Мұндағы: Х = (x1…хn) – объекттің бақыланатын кірістері;
Е = ( e1…ek) – оның бақыланбайтын кірістері;
У = (y1…ym) – объекттің бақыланатын шығыстары.
Динамикалық объекттерді идентификациялауға объекттің кірісіндегі және шығыстарындағы сигналдар ақпарат көзі болып табылады. Е бөгет туралы мәліметтер, әдетте, жоқ. Объекттің барлық кірістері сыртқы ортаның объектке әсерлері және сыртқы ортаның күйлерінен және уақыттан тәуелді анықталған функциялар әсерлері болып табылады. Жиі жағдайда объект кірістері уақыттан тәуелді кездейсоқ функциялар болып табылады; олардың статистикалық қасиеттері жалпы кезде белгісіз, бірақ Х(t) және Y(t) функцияларының үздіксіз немесе дискретті түрдегі іске асырулары бар.
Таза бөгеттер, өлшенетін сигналдармен корреляцияланатын өлшенбейтін сигналдар, өлшеулер және түрлендірулердің қателіктері, т.б. болатын объекттегі шулардың себебінен де идентификациялау қиындалады. Бақыланбайтын E(t) кіріс туралы оның құрылымы, яғни осы кездейсоқ функцияның сипаттамасы белгілі деп есептелінеді. Әдетте E(t) нормалды кездейсоқ процесс, бірақ оны тікелей бақылау мүмкін емес деп алынады. Жалпы көзқарасты жоймай, осындай барлық шуларды шығыста орнатуға болады (11.2 сурет).
Идентификация процедурасын бастау үшін қажетті объект туралы барлық ақпараттар екі түрге бөлінеді: априорлы және апостериорлы ақпарат.
Объекттің кірістері мен шығыстарын бақылау алдында белгілі априорлы ақпарат идентификацияланатын объекттің құрылымын анықтайды.
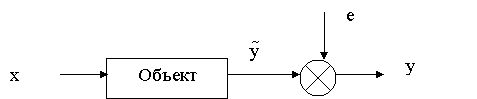
11.2 Сурет – Динамикалық жүйенің классикалық көрсетілуі
Мысалы, келесі төрт белгілерді (бірақ, құрылым тек олармен анықталмайды) атауға болады: динамикалық, стохастикалық, сызықсыз, дискреттілік қасиеттер. Әрине, объект туралы пікірлер апостериорлы ақпаратты талқылағаннан кейін, яғни объекттің кірістері мен шығыстарының жүріс-тұрысын бақылағаннан кейін өзгеруі мүмкін.
Апостериорлы ақпарат сандық түрде көрсетіледі, яғни бұл объекттің кірісі мен шығысын бақылау нәтижелері (протокол). Үздіксіз объекттер үшін үздіксіз мәліметтердің тіркелулерін аламыз: бір бақылау периодындағы (0<=t<=T) объект кірісінің барлық өлшеулері X(t) және оның шығыстарының өлшеу нәтижелері Y(t). Протокол келесі түрде жазылады: (<X(t), Y(t)>, 0<=t<=T). Мұның мағынасы келесідей: объект жүріс-тұрысы n+m әртүрлі қисықтар x1(t),…, xn(t); y1(t),…, ym(t) түрінде осы интервалда тіркелген.
Дискретті түрде X = (X1,…, XN), Y = (Y1, …, YN) және де протокол келесі (<Xi Yj>, i=1,…, N; j = 1,…,N) түрде жазылады, мұнда Xi = (x1i,…,xni), Yi = (y1i ,…, ymi). Осы протокол n+m тік жолдары және N жәй жолдары бар кесте болып табылады
|
х11 |
х21 |
… |
xn1 |
y11 |
y21 |
… |
ym1 |
|
х12 |
х22 |
… |
xn2 |
y12 |
y22 |
… |
ym2 |
|
|
|
|
|
|
|
|
|
|
х1N |
х2N |
… |
xnN |
y1N |
y2N |
… |
ymN |