

7.2.2 . Принцип действия
Принцип действия синхронного двигателя основан на эффекте притяжения разнополярных магнитных полюсов статора (N,S) и ротора (No ,So).
Итак магнитное поле статора вращается с частотой ns (Рис.7.19.). Предположим, что ротор тоже вращается с частотой ns, против часовой стрелки, т.е. полюса магнитного поля ротора будут вращаться с частотой ns.
Без нагрузки магнитные оси полей статора и ротора совпадают, силы притяжения F1 и F2 будут радиальные и не создают никакого вращающего момента. Если возникает какой-либо момент сопротивления Мн (момент нагрузки, Рис.7.20.) на оси двигателя, то ось магнитного поля ротора поворачивается по часовой стрелке на угол .


Рис.7.19. Рис.7.20.
В этом случае силы F1 и F2 имею радиальные и тангенциальные составляющие, причем последние Ft1 и Ft2 создают вращающий момент Мдв и двигатель работает устойчиво при Мн = Мдв.
Можно объяснить принцип действия синхронного двигателя с помощью логической диаграммы (Рис.7.21).
1) Под действием
трехфазного напряжения
![]() в каждой фазе обмотки статора протекает
ток
в каждой фазе обмотки статора протекает
ток
![]() ,
который создает вращающийся с частотой
ns
магнитный
поток Ф1.
,
который создает вращающийся с частотой
ns
магнитный
поток Ф1.
2) В обмотке ротора под действием напряжения возбуждения Uв течет ток Iв, который создает поток Фв также вращающийся с частотой ns.
3) Эти потоки наводят
ЭДС
![]() и
и
![]() ,
которые складываются
,
которые складываются
![]() .
.
4) В тоже время потоки Ф1 и Фв складываются образуя рабочий поток Фр.
5) Ток
![]() взаимодействуя с магнитным потоком Фр
создает электромагнитные силы (ЭМС)
и вращающий
момент Мдв,
противодействующий моменту нагрузки.
взаимодействуя с магнитным потоком Фр
создает электромагнитные силы (ЭМС)
и вращающий
момент Мдв,
противодействующий моменту нагрузки.
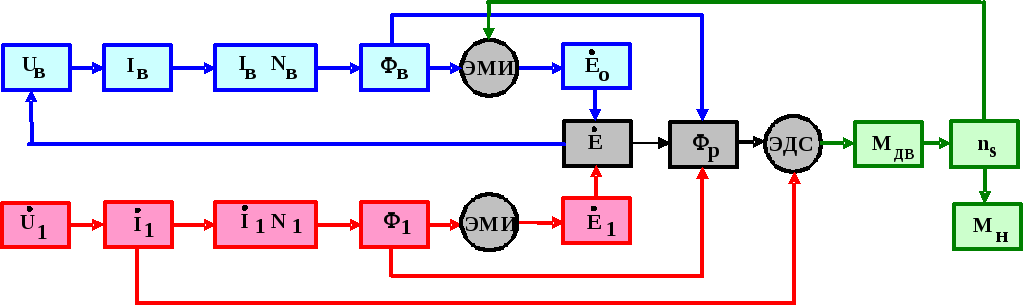 Рис.7.21.
Рис.7.21.
7.2.3. Основные уравнения двигателя
Определим уравнение статора, используя эквивалентную схему и векторную диаграмму (Рис.7.22.-7.24.).
Согласно II
закону
Кирхгофа (Рис.7.22.), имеем: ![]()
Зная, что
![]() и пренебрегая активным сопротивлением
статора Rs,
получим:
и пренебрегая активным сопротивлением
статора Rs,
получим:
![]() .
.



Рис.7.22. Рис.7.23. Рис.7.24.
В этом случае
эквивалентная схема представлена на
рис.7.23., где Xs
называется синхронным
сопротивлением.
Векторная диаграмма (Рис.7.24.) показывает,
что
это смещение
оси магнитного поля ротора по отношению
к оси поля статора, а угол
это сдвиг
по фазе между напряжением![]() и током статора
и током статора
![]() .
Определим уравнение вращающего момента
синхронного двигателя, исходя из
классической формулы механики: PДВ
= МДВ
s.
.
Определим уравнение вращающего момента
синхронного двигателя, исходя из
классической формулы механики: PДВ
= МДВ
s.
Пренебрегая потерями мощности можно записать, что PДВ = Pэл.
В свою очередь электрическая мощность трехфазного синхронного двигателя будет: Pэл = 3 U1 I1 cos.
Воспользуемся геометрическими построениями на рис.10.24., где из треугольников Оса и abc следует ac = Eo sin = I1 Xs cos.
Отсюда
![]() и как результат получим
и как результат получим
![]() ,
,
или окончательно ![]() .
.
Если выражение
![]() величина постоянная, то формула вращающего
момента синусоидальная функция: МДВ
= Ммакс
sin.
величина постоянная, то формула вращающего
момента синусоидальная функция: МДВ
= Ммакс
sin.
7.2.4. Характеристики двигателя
У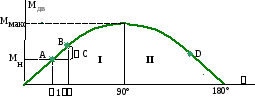 гловая
характеристикаМДВ
= f()
имеет два интервала функционирования
(Рис.7.25.): I
- интервал стабильной работы, II
-интервал нестабильной работы.
гловая
характеристикаМДВ
= f()
имеет два интервала функционирования
(Рис.7.25.): I
- интервал стабильной работы, II
-интервал нестабильной работы.
Рис.7.25.
Когда угол меньше 90°, двигатель работает стабильно (т.A), то есть двигатель находится в режиме авторегулирования. Если момент нагрузки увеличивается Мн +М, угол 1 увеличивается тоже 1 + . Согласно формуле вращающего момента МДВ также увеличится и равновесие установится в точке B. Когда угол больше 90°, двигатель работает нестабильно (т.D), то есть двигатель теряет синхронизм. Поэтому угол = 90° называется критическим. Практически величина этого угла находится в пределах от 30° до 40°. Механическая характеристика М=f(n) синхронного двигателя – это прямая линия параллельная оси X (Рис.7.26.). В таком случае частота вращения постоянна и не зависит от нагрузки. Семейство U – образных характеристик наиболее важно для промышленного применения синхронных двигателей (Рис.7.27.).
Этот рис.10.27. показывает, что существует минимальный ток возбуждения Iв.мин для каждой кривой, при котором коэффициент мощности cos=1, и что существуют интервалы недовозбуждения и перевозбуждения. В первом интервале синхронный двигатель работает, имея характер индуктивного сопротивления, а во втором емкостного. Это свойство позволяет использовать синхронный двигатель для коррекции коэффициента мощности в промышленных установках, применяя синхронный компенсатор вместо батареи конденсаторов.


Рис.7.26. Рис.7.27.