

7.1.5 . Элементы конструкции асинхронного двигателя
Асинхронный двигатель конструктивно состоит из статора - неподвижная часть и ротор - вращающаяся часть.
Статор. Сердечник статора представляет из себя цилиндр, собранный из пластин электротехнической стали с пазами на внутренней стороне. В эти пазы уложены трехфазные обмотки, соединенные с сетью (Рис.7.9.).

Рис.7.9.
Существует два типа ротора:
Беличья клетка (короткозамкнутый ротор). На рис. 7.10. и 7.11. представлены: сердечник ротора и короткозамкнутая обмотка.

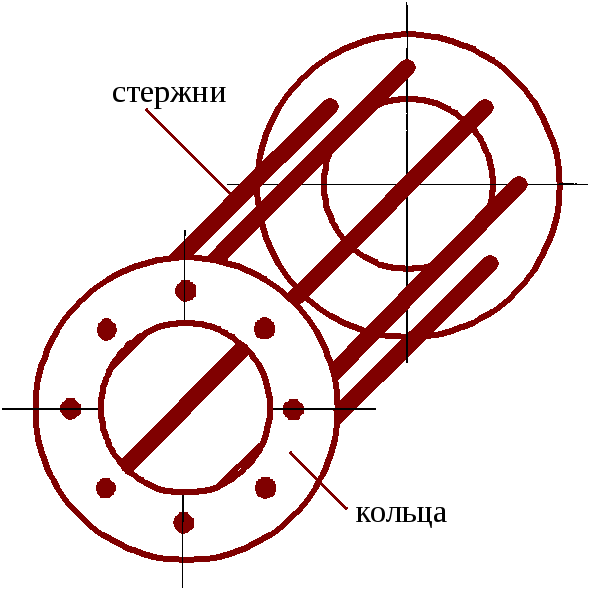
Рис.7.10. Рис.7.11.
На практике обмотка ротора отливается из алюминия в отверстия в пластинах сердечника, одновременно с этим отливаются элементы охлаждения двигателя (крылья).
Фазный ротор. Если вместо отверстий в пластинах сердечника сделать пазы, то в них может быть уложена трехфазная обмотка ротора, которая с помощью щеток и колец соединяется с внешней цепью. Как правило, это соединение "звезда" вместе с трехфазным реостатом.
7.1.6. Электродвижущие силы ротора и статора
Если вращающееся магнитное поле создает синусоидальный магнитный поток Фmp, то (аналогично трансформатору) имеем выражения для ЭДС статора E1 = 4,44 f1 N1 K1 Фmp, и ротора E2s = 4,44 f2 N2 K2 Фmp где: K1 ,K2 - обмоточные коэффициенты; N1 ,N2 - число витков обмоток; f1 - частота сети; f2 - частота роторных токов, зависящая от скольжения и частоты сети f2 = sf1.
В момент пуска двигателя, когда n = 0 и s = 1 ЭДС ротора будет
E2 = 4,44 f2 N2 K2 Фmp или E2s = s E2.
То есть ЭДС ротора зависит от скольжения.
Исходя из ранее сказанного, можно записать выражения для реактивных сопротивлений статора и ротора: X1 = 2 f1 L1 и X2s = 2 f2 L2.
Зная, что f2 = s f1 имеем X2s = s 2 f1 L2 и тогда для пуска двигателя получим X2 = 2 f1 L2. Итак реактивное сопротивление ротора также зависит от скольжения X2s=sX2.
7.1.7. Основные уравнения асинхронного двигателя
Аналогично трансформатору можно представить эквивалентные схемы ротора и статора (Рис.7.12. и 7.13.):


Рис.7.12. Рис.7.13.
Согласно II закону
Кирхгофа запишем уравнения соответствующие
данным схемам:
![]()
![]()
где: U1 - напряжение сети; X1, R1 - реактивное и активное сопротивления статора; X2s, R2 - реактивное и активное сопротивления ротора; E1 ,E2s - ЭДС статора и ротора.
Для пуска двигателя
(s = 1) имеем:
![]()
![]()
Когда ротор
вращается (0<s<1), первое уравнение
остается неизменным, а второе
трансформируется в:
![]() откуда
откуда![]() .
.
Подставляя в
уравнение следующее выражение
![]() ,
получим
,
получим![]() ,
где:
,
где:![]() - эквивалентная нагрузка двигателя.
- эквивалентная нагрузка двигателя.
7.1.8. Вращающий момент
Активная электрическая
мощность трехфазного асинхронного
двигателя известна
![]() ,.
,.
где два первых члена уравнения соответствуют электрическим потерям в статоре и роторе, а третий определяет электрическую мощность, которая преобразуется в механическую.
Согласно классической формуле механики имеем Pмех=M =Ms(1 - s),
где: M - механический момент [Н м]; - угловая скорость [рад/сек].
Приравнивая
электрическую и механическую мощности,
получим
![]() =
Ms
(1 - s), откуда формула момента будет
=
Ms
(1 - s), откуда формула момента будет  .
.
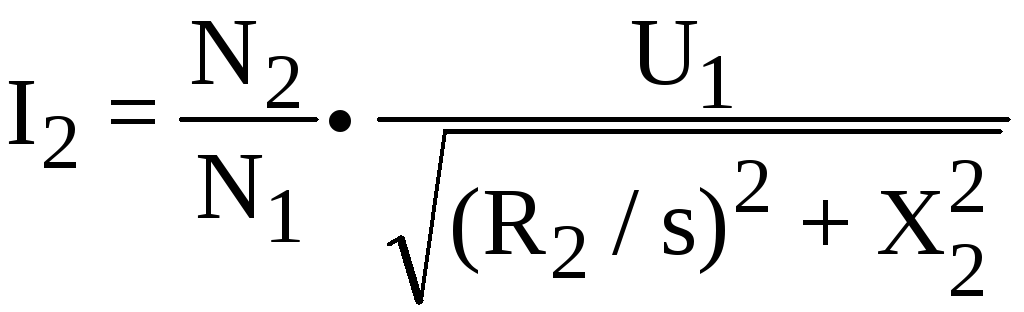
Считая, что
![]() аналогично трансформатору, выделим из
основных уравнений асинхронного
двигателя ток ротораI2
, исключая
при этом ЭДС E2
:
аналогично трансформатору, выделим из
основных уравнений асинхронного
двигателя ток ротораI2
, исключая
при этом ЭДС E2
:
![]()

Пренебрегая
падениями напряжения I1R1
и
I1X1
по сравнению с
U1,
получим:
 .
И тогда окончательно в действующих
значениях будем иметь:
.
И тогда окончательно в действующих
значениях будем иметь:
В результате выражение для вращающего момента будет иметь вид:
