

Тема №6. Электрические машины
6.1. Основные понятия и функции
Электропривод - это система, которая преобразует электрическую энергию в механическую, совершает при этом работу и контролирует процесс преобразования.
Схема электропривода содержит электрический двигатель с аппаратурой управления и контроля, органы передачи энергии от двигателя к производственному механизму и сам производственный механизм.
Основные функции электропривода:
а) включение и отключение двигателя от сети питания;
б) управление и (или) контроль необходимых характеристик, таких как: частота вращения, момент, мощность, ток и т.д., во время пуска и торможения, в процессе регулирования скорости.
Функция защиты двигателя специальная, она существует для любого типа электропривода. Поэтому будем рассматривать двигатель всегда с элементами защиты.
Блок-схемы на рис. 6.1-6.3 иллюстрируют основные типы электропривода.
![]()
Рис.6.1.

Рис.6.2.
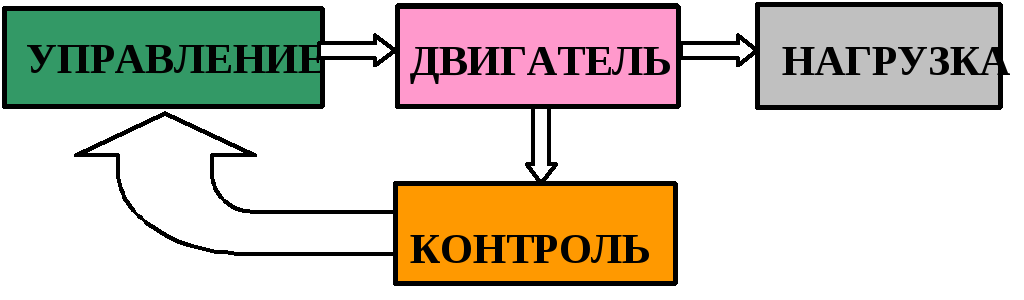
Рис.6.3.
На рис. 6.1. представлена простейшая схема электропривода с заданными элементами управления и без контроля параметров процесса.
Рис. 6.2. демонстрирует разомкнутую схему с контролем процесса преобразования, но без обратной связи.
На последней блок-схеме (Рис.6.3.) представлена замкнутая автоматическая схема с обратной связью.
Итак, схема электропривода имеет три основных элемента:
1) электродвигатель;
2) нагрузка (производственный механизм);
3) управление и контроль (контроллер).
6.2. Механические характеристики электрических двигателей и производственных механизмов
6.2.1 Условие устойчивого функционирования электропривода
Механическая характеристика М = f (n) - это основная характеристика для выбора схемы электропривода, причем основные критерии выбора: стабильность и экономичность.
В зависимости от своих механических характеристик, производственные механизмы делятся на следующие группы (Рис.6.4.):
1) постоянный момент сопротивления (например: подъемные краны, транспортеры, лифты и т.д.);
2) линейно-возрастающий момент сопротивления (например: мельницы, насосы, электрические пилы и т.д.);
3) нелинейно-возрастающий момент сопротивления (например: вентиляторы, смесители, центрифуги, компрессоры и т.д.);
4) нелинейно-спадающий момент сопротивления (например: металлорежущие станки и прокатные станы.)
Различные электрические двигатели имеют также разные механические характеристики (Рис.6.5):
1) синхронные двигатели; 2) асинхронные двигатели; 3) двигатели постоянного тока с параллельным возбуждением; 4) двигатели постоянного тока с последовательным возбуждением.
Э лектропривод
работает в точке, где пересекаются
механические характеристики двигателя
и производственного механизма. Назовем
момент производственного механизмаМс
(моментом
сопротивления) и вращающий момент
двигателя Мд.
Тогда условие
устойчивой работы электропривода будет:
лектропривод
работает в точке, где пересекаются
механические характеристики двигателя
и производственного механизма. Назовем
момент производственного механизмаМс
(моментом
сопротивления) и вращающий момент
двигателя Мд.
Тогда условие
устойчивой работы электропривода будет:
![]()

Рис.6.4. Рис.6.5.
Рис.
6.6. демонстрирует два случая: устойчивой
и неустойчивой работы системы (точка
Р).
В первом случае [Mд=f(n) и Mc1=f(n)], какое-либо изменение частоты вращения вызывает возврат в точку Р. Например, когда частота вращения уменьшается до n1, вращающий момент Mд увеличивается, тогда как момент сопротивления Mc1 уменьшается. В этом случае результирующий момент ускоряет систему и возвращает ее к частоте вращения np. Если частота вращения увеличится до n2, вращающий момент Mд станет меньше момента сопротивления Mc1 возникает торможение системы и возврат к частоте вращения np. Во втором случае [Mд=f(n) и Mc2=f(n)], уменьшение частоты вращения до n1 вызывает появление тормозного момента который еще больше уменьшает частоту вращение до полной остановки системы. С другой стороны, если частота вращения увеличится до n2, вращающий момент становится больше момента сопротивления и система идет в "разнос". Разность Mд-Mc2=Mуск называется момент ускорения.

Рис.6.6.
Формула ![]()
![]() дает
нам связь между: t
- временем разгона [сек], J
- моментом инерции [
дает
нам связь между: t
- временем разгона [сек], J
- моментом инерции [![]() ],
Mуск
- моментом
ускорения [Н м ], n
- частотой вращения [ 1/сек ].
],
Mуск
- моментом
ускорения [Н м ], n
- частотой вращения [ 1/сек ].
Эта формула обычно используется для расчета времени пуска или торможения электропривода.