

Лекция 18. Эдс обмотки якоря
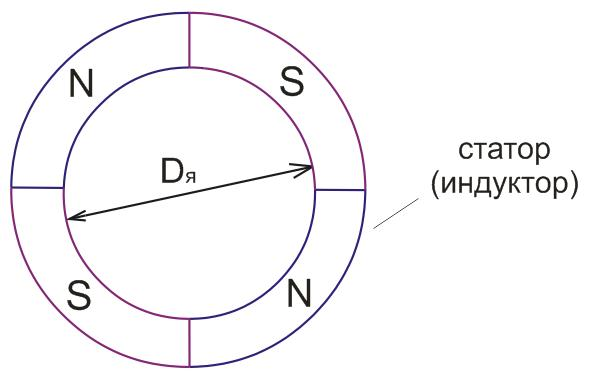
Число полюсов индуктора равно четырем. Вводится р – число пар полюсов. Для этого статора р = 2, а 2р = 4;
|
Рис. 17.1. Статор двигателя постоянного тока |
Рис. 17.2. Полюс
|

Индукция
магнитного поля ![]() , (17.1)
, (17.1)
где Ф – магнитный поток одного полюса; S – площадь поверхности одного полюса.
![]() ; (17.2)
; (17.2)
![]() . (17.3)
. (17.3)
Найдем ЭДС якоря:
![]() ;
(17.4)
;
(17.4)
![]() , (17.5)
, (17.5)
где
![]() – конструктивная постоянная электрической
машины.
– конструктивная постоянная электрической
машины.
Электромагнитный момент, развиваемый в двигателе постоянного тока

Рис. 17.3. Якорь
Так как проводники якоря находятся в магнитном поле, и по ним течет ток, то по закону Ампера на них действует сила. Таким образом, на каждый проводник якоря будет действовать вращающий момент:
![]() ; (17.6)
; (17.6)
![]() ; (17.7)
; (17.7)
![]() , (17.8)
, (17.8)
где
![]() – магнитная индукция.
– магнитная индукция.
![]() –электромагнитный
момент якоря. (17.9)
–электромагнитный
момент якоря. (17.9)
Назначение пускового сопротивления в схеме двигателе постоянного тока независимого возбуждения
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ) изображена на рис. 17.4.
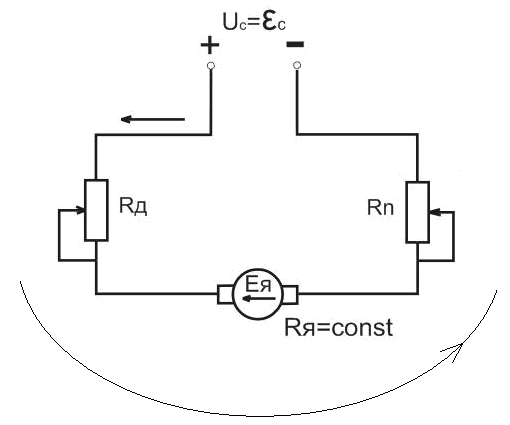
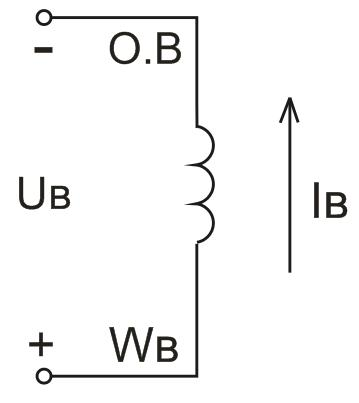
Рис. 17.4. Схема двигателя постоянного тока независимого возбуждения:
Wв – число витков обмотки возбуждения.
По второму закону Кирхгофа для цепи якоря можем записать:
Uс – Eя = RД·Iя + Rя·IД + Rп·Iя. (17.12)
Предположим,
что
![]() ,
тогда
,
тогда
![]() , (17.13)
, (17.13)
В момент пуска ω = 0, т.е. Ея = 0;
![]() –пусковой
ток. (17.14)
–пусковой
ток. (17.14)
Пусть
![]() ;
;![]() ;
;
А)
![]() ,
,![]() ;
;
В)
![]() ,
,![]() – приемлемый для эксплуатации ток.
– приемлемый для эксплуатации ток.
Вывод. Если не принять специальных мер (введение пускового сопротивления в момент пуска), обмотка якоря сгорит, то есть RП используется для ограничения тока в момент пуска.
При увеличении скорости якоря от ω = 0 до ω = ωном ЭДС якоря Ея увеличивается от 0 до Ея=Uс и необходимость в Rп пропадает, поэтому Rп рассчитано на кратковременный режим работы – на период пуска. При достижении ω = ωном Rп выводится из работы.
Лекция 19. Основные уравнения дпт независимого возбуждения Регулирование скорости двигателя постоянного тока
Уравнение баланса напряжений в цепи якоря (см. (17.10) имеет вид
Ея = Uс – Iя(Rд + Rп + Rя), (18.1)
При работе (Rп= 0) уравнение баланса напряжений в цепи якоря будет иметь вид
Ея = Uс– Iя(Rд+ Rя). (18.2)
Уравнение электромагнитного момента имеет вид Мя= сФIя. (18.3)
Уравнение ЭДС в обмотке якоря имеет вид Е=сФω. (18.4)
Закон Ома для магнитной цепи выражается формулой
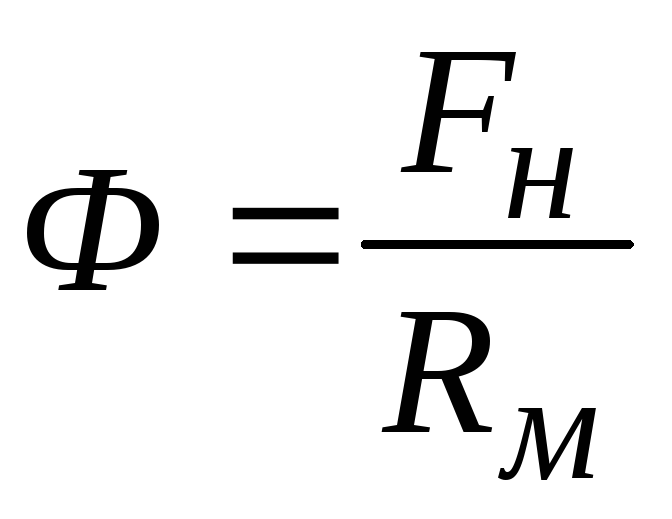 ,
(18.5)
,
(18.5)
где Fн= WвIв (намагничивающая сила обмотки возбуждения); Rм – магнитное сопротивление участка магнитной цепи, по которому замыкается магнитный поток Ф.
![]() . (18.6)
. (18.6)
Из выражения (18.4) получим
![]() . (18.7)
. (18.7)
Обозначим
![]() ;
;![]() ; (18.8–18.9)
; (18.8–18.9)
![]() ; (18.10)
; (18.10)
![]() , (18.11)
, (18.11)
где
![]() иIя
– являются
переменными; А
и В –
коэффициенты.
иIя
– являются
переменными; А
и В –
коэффициенты.
Следовательно,
уравнение
![]() ,
то есть зависимость
,
то есть зависимость![]() является прямой линией (рис. 18.1).
является прямой линией (рис. 18.1).

Рис.18.1.
График функции
![]()
В
точке В скорость
![]() =
0,
=
0,
![]() .
.
В
точке А ток Iя=
0,
![]() .
.
Зависимость
(18.11) и рис. (18.1) представляют собой
электромеханическую характеристику
двигателя постоянного тока независимого
возбуждения, т.к.
![]() – механическая величина, аIЯ
– электрическая величина.
– механическая величина, аIЯ
– электрическая величина.
Из уравнения (18.10) видно, что скорость ДПТ можно изменять:
1) путем изменения UС, такое регулирование скорости называется якорным регулированием.
2) путем изменения магнитного потока Ф, такое регулирование скорости называется полюсное регулирование.
3) путем изменения добавочного сопротивления RД – реостатное регулирование.
Рассмотрим подробнее эти способы.