

Билет №5
Обращение потока мощности в тиристорном нереверсивном электроприводе (система ТП-Д).
Перевод нереверсивного тиристорного преобразователя из выпрямительного в инверторный режим работы.
Инвертирование потока энергии из прямого на обратное направление сложнее происходит в системе “тиристорный преобразователь- двигатель постоянного тока” (ТП-Д), чем в системе Г-Д.
Сложность вытекает из того, что не удается изменить направление тока в якорной цепи, вследствие односторонней проводимости вентилей. В работу схемы необходимо вмешательство обслуживающего персонала. Рассмотрим “перегон порожних сосудов”, Рассмотрим процессы, происходящие в системе ТП- Д при выполнении “перегона” и способы управления этим процессом.
При движении левого сосуда вверх до середины ствола машина “М” работает в двигательном режиме, а преобразователь- в выпрямительном. Их ЭДС направлены встречно, но т.к. Ed превышает величину EМ , ток Id совпадает по направлению с ЭДС Ed .
В соответствии с признаками источника и приемника ТП является источником, а машина “М”- приемником энергии. После перехода положения равновесия сосудов в стволе, левая ветвь окажется короче правой и машина “М”, раскручиваемая более тяжелой правой ветвью, увеличит свои обороты. При этом, возрастает значение ЭДС EМ, она превысит Ed , однако ток Id изменить свое направление на противоположное не сможет- этому помешает односторонняя проводимость вентилей. Это означает, что машина “М” не становится источником, а ТП- приемником энергии.
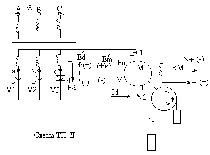
Для реализации последнего, не изменяя при этом направление тока в якорной цепи на обратное, необходимо поменять полярность ЭДС преобразователя и машины “М”. В ТП это достигается изменением величины угла управления . Его нужно сделать большим, чем 90. Выполнить это очень просто, воздействуя на систему ТП. Т.е. в силовой цепи преобразователя никаких переключений делать не требуется. Изменить полярность ЭДС машины “М”, в принципе, можно тремя способами:
Изменить направление вращения машины на обратное, что для нас не подходит;
Переключить силовые провода (точки 1 и 2) на противоположные щетки якоря машины “М”;
Поменяв направление тока обмотки возбуждения на противоположное, изменив, например, полярность напряжения возбуждения Uв.
Остановимся на 3- ем способе.
Диаграммы напряжения и тока при работе ТП в режиме приемника энергии, т.е. в инверторном режиме приведены на рис 22.
Анализируя работу тиристорного преобразователя в инверторном режиме, можно перечислить условия, при которых этот режим возможен.
Эти условия следующие:
Нагрузка должна содержать в своем составе источник постоянной ЭДС-EМ ;
Схема должна обеспечивать возможность протекания тока в направлении ЭДС нагрузки, т.е. полярность EМ должна совпадать с проводящем направлением вентилей. Для выполнения этого требования мы изменим полярность ЭДС EМ на EМ;
Тиристорный преобразователь должен вырабатывать ЭДС Ed, направленную встречно ЭДС нагрузки и встречно проводящему направлению тиристоров;
Среднее значение ЭДС нагрузки должно превышать среднее значение ЭДС ТП.
Сказанное можно проиллюстрировать следующими эквивалентными схемами, изображающими выпрямительный и инверторный режимы работы ТП:

Необходимо отметить, что основная зависимость, связывающая управляющий фактор () с величиной выпрямленного напряжения (Ed ) остается справедливой и для режима инвертирования. При этом > 90, Ed < 0;
Неустойчивость работы ТП в инверторном режиме при малых значениях угла и больших
значениях тока - эта неустойчивость проявляется в возможности так называемого
“опрокидывания” или “прорыва” инвертора.
Выбор схем электрических сетей. Требования к надёжности варианта схемы электроснабжения. Схемы подключения источников питания. Выбор варианта схемы электроснабжения.
Выбор схем электрических сетей
Система электроснабжения промышленного предприятия состоит из питающих, распределительных, трансформаторных и преобразовательных подстанций и связывающих их кабельных и воздушных сетей, а также токопроводов.
Основные принципы построения схем электроснабжения промышленных предприятий:
а) максимальное приближение источников высокого напряжения 35–330 кВ (районных и узловых подстанций системы УРП) к электроустановкам потребителей с подстанциями глубокого ввода (ПГВ), размещаемых рядом с энергоемкими производственными корпусами;
б) резервирование питания для отдельных категорий потребителей должно быть заложено в самой схеме электроснабжения.;
в) секционирование всех звеньев системы электроснабжения начиная от шин УРП, ГПП, ПГВ, РП и ТП с установкой на них системы автоматического ввода резерва для повышения надежности питания.
Требования к надёжности электроснабжения
Электроснабжение объекта может осуществляться от собственной электростанции (ТЭЦ, ГТЭС, ГПЭС), от энергетической системы, а также от энергетической системы при наличии собственной электростанции.
Требования, предъявляемые к надёжности электроснабжения от источников питания определяются потребляемой мощностью объекта и его видом. Приёмники электрической энергии в отношении обеспечения надёжности электроснабжения разделяются на несколько категорий.
Первая категория – электроприёмники, перерыв электроснабжения которых может повлечь за собой опасность для жизни людей, значительный экономический ущерб, повреждение дорогостоящего оборудования, расстройство сложного технологического процесса, массовый брак продукции. Допустимая продолжительность нарушения электроснабжения для электроприемников первой категории не более 1 мин.
Из состава электроприёмников первой категории выделяется особая группа (нулевая категория) электроприемников, бесперебойная работа которых необходима для безаварийного останова производства с целью предотвращения угрозы для жизни людей, взрывов, пожаров и повреждения дорогостоящего оборудования.
Вторая категория – электроприёмники, перерыв электроснабжения которых приводит к массовым недоотпускам продукции, массовым простоям рабочих, механизмов. Допустимая продолжительность нарушения электроснабжения для электроприёмников второй категории не более 30 мин.
Третья категория – все остальные электроприёмники, не подходящие под определение первой и второй категорий. К этой категории относятся установки вспомогательного производства, склады неответственного назначения.
Схемы подключения источников питания
Электроснабжение от собственной электростанции (рис. 4.4), расположенной вблизи объектов, при совпадении напряжений распределительной сети и генераторов электростанции осуществляется путем присоединения трансформаторов к шинам распределительных устройств (РУ) электростанции или непосредственно с помощью линий электропередачи.
Схема электроснабжения от энергетической системы при отсутствии собственной электростанции показана на рис. 4.5 и 4.6. В зависимости от напряжения источника питания электроснабжение осуществляется двумя способами: по схеме на рис. 4.5 при напряжении 6–20 кВ; по схеме рис. 4.6 при напряжении 35–220 кВ.

Рис. 4.4. Схема электроснабжения от собственной электростанции
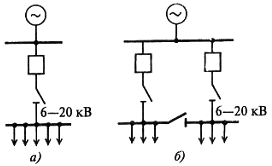
Рис. 4.5. Схема электроснабжения от электрической системы при напряжении 6–20 кВ
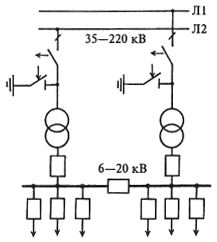
Рис. 4.6. Схема электроснабжения от электрической системы при напряжении 35–220 кВ
Выбор схемы распределения электроэнергии
Общие положения. Система электроснабжения может быть выполнена в нескольких вариантах, из которых выбирается оптимальный. При её выборе учитываются степень надёжности, обеспечение качества электроэнергии, удобство и безопасность эксплуатации, возможность применения прогрессивных методов электромонтажных работ.
Технические средства автоматизации в металлообработке.
Характеристика основного оборудования и аппаратов в металлообработке:
Станки: токарные, фрезерные, сверлильно-расточные, шлифовальные, многоцелевые (обрабатывающий центр), зубообрабатывающие, электроэрозионные и др.
Периферия станков: роботы, накопители палет, блоки инструментальных магазинов и др.
Транспортные системы: робокары, конвейеры и др.
Накопительные системы: автоматизированные склады с кранами-штабелерами, станции комплектации и др.
Вспомогательные системы: контрольно-измерительные машины, станции мойки-сушки и т.д.
1 – универсальные станки с ручным управлением; 2 – станки с ЧПУ;
3 – многооперационные станки; 4 – гибкие производственные модули (ГПМ);
5 – гибкие производственные участки (ГПУ); 6 – гибкие линии, цехи;
7 – автоматические линии.
СЧПУ – система числового программного управления, обеспечивающая покадровое программирование и исполнение перемещений, ряд режимов обработки и управления электроавтоматикой.
Информационные потоки в СЧПУ:
Информация - сведения об явлениях природы, событиях в общественной жизни, процессах в технических устройствах.
Код - система знаков, однозначно определяющая информацию.
Сообщение - зафиксированная информация в материальной форме.
Непрерывное сообщение - физическая форма информации.
Дискретное сообщение - набор элементов (букв, символов), из которых в дискретные моменты времени формируются некоторые последовательности.
Последовательность числовых символов - цифровая информация.
С любой необходимой точностью любое непрерывное сообщение можно заменить цифровым сообщением путём квантования непрерывного сообщения по уровню и по времени.
Требование к точности, быстродействию в системе автоматизации:
Точность информации.
Напряжение
Ток
Повышение точности
Фаза (частота)
Цифра
Сигналы по току передаются без потерь информации в линии в зависимости от её длины.
Выходной элемент линии по напряжению или току один - транзистор .
На линию передачи потенциала помехи влияют сильнее, т.к. Zнагр значительно больше.
В цифре достигается любая требуемая по техническим условиям точность - всё зависит от количества разрядов.
Ошибка в установившемся режиме - точность САУ
 .
.
Напряжение и ток - непрерывная форма информации. Фаза может быть в непрерывной форме (гармонический сигнал) и в дискретной (частотный импульсный сигнал). Цифровой сигнал - дискретный.
Дискретизация по уровню и по времени непрерывного сигнала.
Процесс преобразования непрерывного сигнала в дискретный называется квантованием.
При
преобразовании непрерывного сигнала
в дискретный осуществляется квантование
по уровню и по времени.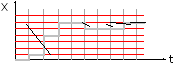
На рис. представлен непрерывный сигнал и полученный из него после квантования по уровню и по времени цифровой сигнал.
При преобразовании всегда возникает вопрос - каковы должны быть кванты по уровню и по времени?
Величина кванта по уровню - это, разрешающая способность системы управления, единица младшего разряда цифрового кода.
Квантование по времени вносит в системы управления запаздывание на период квантования. Следует учитывать и теорему Котельникова - Шеннона, согласно которой предельная полоса пропускания дискретной системы теоретически не может быть больше половины частоты квантования: fпр fкв/2.
Кодирование информации:
-Буквенно-цифровые коды:
Буквы – адрес, команда, другая качественная информация; цифры – количественная информация.
1. ASCII – American Standard Code for Information Interchange (американский стандартный код для обмена информацией). В настоящее время является мировым стандартом для ЭВМ.
2. ISO-7bit – International Standards Organization (европейский код для систем ЧПУ)
3. EIA – Electronic Industring Association (американский код для систем ЧПУ 1969 года) – это стандарт ассоциации промышленников по радиоэлектронике и телевидению.
Код ISO-7bit утвержден в России, – смотри ГОСТ 20999-83 (СТСЭВ3585-82).
Коды ISO-7bit и EIA легко переводятся с одного на другой. Это 7-битные коды, т.е. позволяют кодировать до 127 символов. Восьмой бит используется для бита приоритета (контроля достоверности информации по четности или нечетности).
-Цифровые коды:
Цифровые коды служат для записи как дискретной (численной) информации, так и буквенной. Цифровой код – позиционный, т.е. значение кода зависит от места (позиции), которое занимает та или иная цифра.
Двоично-десятичный код используется как переходный при введении оператором десятичной информации в ЭВМ с целью начального запоминания с будущим преобразованием в двоичный.
Восьмеричный код используется для задания адреса в системе команд DEC, шестнадцатеричный код для задания адреса в системе команд INTEL.
Унитарный код – последовательность импульсов, несущая двойную информацию: частота импульсов, количество импульсов.
Позиционный код – это фактически n отдельных информационных дискретных сигналов, дискретный код (дискретная информация).
Код Грея – двоичный код датчика положения, в котором между двумя соседними значениями кода имеется разница только в одном разряде.