

Микропроцессорные стойки чпу
Первоначально микропроцессорные СЧПУ, проведя интерполяцию программным путем, выдавали задание в двоичном коде на фазовую систему связи с электроприводом (см. рис. 10.7, 10.8).
В дальнейшем от фазовых устройств связи с электроприводом отказались, возложив такие операции, как сравнение задания и сигнала обратной связи, реализацию пропорционального регулятора положения, скоростную компенсацию задающего сигнала (частичная инвариантность по управлению), на ЭВМ.
Структура одного канала связи с приводом представлена на рис. 10.9. В обратной связи по положению с фазовращателем обычно используют как ПЧК при высоких скоростях, так и ПФК при малой скорости.
Если используется фотоимпульсный датчик положения, структура еще более упрощается. В канале обратной связи используется тогда ПЧК, а иногда и ПЧН для получения сигнала обратной связи по скорости (см. рис. 10.9).
Билет №8
Принципы импульсного регулирования напряжения в электроприводе постоянного тока.
В основе работы импульсных преобразователей лежит следующий принцип. Предположим, что нагрузка подключена к источнику напряжения через ключевой элемент “к”, который периодически замыкается и размыкается.
Время замкнутого (tр) и разомкнутого (t0) состояний ключа можно автоматически изменять, воздействуя на него сигналами, поступающими из системы управления “СУ”. В результате к нагрузке будет приложено импульсное напряжение, форма которого соответствует диаграмме, представленной на рис 64б.
Очевидно, что среднее значение напряжения на нагрузке будет зависеть от соотношения времени замкнутого и разомкнутого состояний ключа К.

Согласно определению среднего значения напряжения можно записать:
 (4-67)
(4-67)
где Ud - среднее значение напряжения на нагрузке;
= tр + t0 - период переключения ключа или время цикла регулирования;
= 1/ - частота переключения ключа.
Отношение (tр /) = (4-68) называют коэффициентом заполнения периода рабочим импульсом. Изменяя , можно регулировать выходное напряжение на нагрузке.
Иногда рассматривается обратная величина q = (1/ ) = ( / tр), которая называется скважностью работы ключа.
Регулирование напряжения в рассматриваемой схеме за счет изменения коэффициента можно рассматривать как широтно-импульсное регулирование напряжения на нагрузке.
Возможны три способа регулирования напряжения:
Широтно-импульсное регулирование (ШИР), когда время tр - переменное, а частота - постоянная;
Частотно- импульсное регулирование (ЧИР), когда время tр - постоянное, а частота - переменная;
Широтно-частотное регулирование, когда время tр и частота - переменные.
Чаще всего используется первый способ регулирования выходного напряжения. Таким образом время рабочего импульса и время паузы связаны с соотношениями:
tр = (4-69) t0= (1- ) (4-70)
Схема регулирования напряжения и диаграмма, изображенные на рис 64, могут быть реализованы лишь при активном сопротивлении нагрузки.
При использовании импульсного регулирования в системах электропривода нагрузка имеет активно- индуктивный характер и часто в составе нагрузки присутствует источник ЭДС.
В таком случае должен быть предусмотрен обратный вентиль. Он обеспечивает непрерывность тока в нагрузке при разрыве цепи импульсным элементом (ключом).
Компенсация реактивной мощности с помощью специальных устройств. Выбор мощности и места установки компенсирующих устройств.
Для реактивной мощности приняты такие понятия, как потребление, генерация, передача и потери. Считают, что если ток отстает по фазе от напряжения (индуктивный характер нагрузки), то реактивная мощность потребляется, а если ток опережает напряжение (ёмкостный характер нагрузки), реактивная мощность генерируется.
Мероприятия, проводимые по компенсации реактивной мощности, могут быть разделены на связанные со снижением потребления реактивной мощности приёмниками электроэнергии и требующие установки КУ в соответствующих точках системы электроснабжения.
Для компенсации реактивной мощности, потребляемой электроустановками промышленного предприятия, используют генераторы электростанций и синхронные двигатели, а также дополнительно устанавливаемые компенсирующие устройства - синхронные компенсаторы, батареи конденсаторов и специальные статические источники реактивной мощности.
На
начальной стадии проектирования, либо
при проверочных расчётах действующего
предприятия, определяют наибольшие
суммарные расчётные значения активных
( )
и реактивных (
)
и реактивных ( )
электрических нагрузок предприятия
(при естественном коэффициенте мощности)
в соответствии с расчётом электрических
нагрузок.
)
электрических нагрузок предприятия
(при естественном коэффициенте мощности)
в соответствии с расчётом электрических
нагрузок.
Для определения мощности компенсирующих устройств используют суммарное максимальное значение реактивной нагрузки предприятия:
 , (5.18)
, (5.18)
где
 - коэффициент, учитывающий несовпадение
по времени наибольших значений
- коэффициент, учитывающий несовпадение
по времени наибольших значений и
и .
.
О
величинах нагрузок
 и
и сообщается
в энергосистему, которая определяет
входную, экономически оптимальную
реактивную мощность, которая может быть
передана предприятию в режимах наибольшей
(
сообщается
в энергосистему, которая определяет
входную, экономически оптимальную
реактивную мощность, которая может быть
передана предприятию в режимах наибольшей
( )
и наименьшей (
)
и наименьшей ( )
активной нагрузки энергосистемы.
)
активной нагрузки энергосистемы.
Определение места установки компенсирующих устройств в сетях до 1 кВ
В системах электроснабжения промышленных предприятий к ступени напряжения ниже 1 кВ подключается большая часть потребителей реактивной мощности (РМ). Однако полностью скомпенсировать всю величину РМ на данной ступени не всегда удаётся по технико-экономическим соображениям. Недостающая часть или нескомпенсированная реактивная нагрузка покрывается перетоком РМ из сети высокого напряжения.
Для отдельных шинопроводов предусматривают не более двух близких по мощности комплектов КУ, суммарной мощностью:
 . (5.20)
. (5.20)
Если основные реактивные нагрузки присоединены ко второй половине шинопровода, устанавливают только одно КУ. Точку его подключения определяют из условия:
 , (5.21)
, (5.21)
где
 - максимальные реактивные нагрузки
шинопровода перед узлом
- максимальные реактивные нагрузки
шинопровода перед узлом и после него (см. рис. 6).
и после него (см. рис. 6).
Рис. 6. Схема подключения одной конденсаторной батареи к шинопроводу.
При подключении к шинопроводу двух конденсаторных батарей (см. рис. 7), точки их подключения определяют из следующих условий:
для дальней батареи конденсаторов (БК)
 ; (5.22)
; (5.22)
ближней БК
 . (5.23)
. (5.23)

Рис. 7. Схема подключения двух БК к шинопроводу
Автоматизация барабанных котельных установок
Регулирование уровня воды в барабане котла
Автоматическая система регулирования питания предназначена для поддержания материального соответствия между подачей питательной воды в котел и расходом пара. Показателем этого соответствия служит уровень воды в барабане котла.
Снижение уровня ниже допустимых пределов («упуск» воды) может привести к нарушению циркуляции в экранных трубах (опрокидывание циркуляции) и, как следствие, к пережогу труб. При значительном повышении уровня в барабане возможен захват частиц воды паром, вынос ее в пароперегреватель и турбину, что вызывает занос пароперегревателя и турбины солями и ведет к их разрушению. В связи с этим к точности поддержания заданного уровня предъявляются очень высокие требования.
Регулирование питания котлов малой производительности обычно осуществляется одноимпульсными регуляторами, управляемыми датчиками изменения уровня воды в барабане. В котлах средней и большой паропроизводительности с малым водяным объемом применяются двухимпульсные регуляторы питания котла по уровню воды и расходу пара (рис. 14.8), а также трехимпульсные, управляющие питанием котла по уровню воды, расходу пара и расходу питательной воды.

Рис. 14.8. Принципиальная схема АСР питания: Э – экономайзер; ПП – пароперегреватель; РП – регулятор; РПК – регулирующий питательный клапан
Таким образом, зона работы АСР питания ограничена уставкой защиты от понижения уровня в барабане котла, с одной стороны, и уставкой открытия аварийного слива – с другой. Эти пределы обуславливают безопасность работы котла, превышение их влечет за собой аварийную ситуацию.
АСР питания барабанного котла должна обеспечить удержание уровня в допустимых пределах:
1) при стационарном режиме (при отсутствии резких возмущений по нагрузке) максимально допустимые отклонения уровня обычно не должны превышать ±20 мм;
2) при скачкообразном возмущении нагрузки на 10 % (исходная нагрузка – номинальная) максимально допустимые отклонения по уровню обычно не должны превышать ±50 мм;
3) при нормальном стационарном режиме работы котла число включений регулятора не должно превышать 6 в минуту.
Типовая ACP питания содержит следующие элементы: первичные измерительные преобразователи (датчики) уровня, расхода пара; регулирующие устройства; коммутирующую и управляющую аппаратуру; исполнительные механизмы; регулирующие органы.
Применяемая в настоящее время схема регулирования уровня в барабанах котлов приведена на рис. 14.10, а.
Необходимость применения сравнительно сложной системы регулирования обусловлена наличием в современных котлах высокого давления своеобразного эффекта «вскипания» уровня.
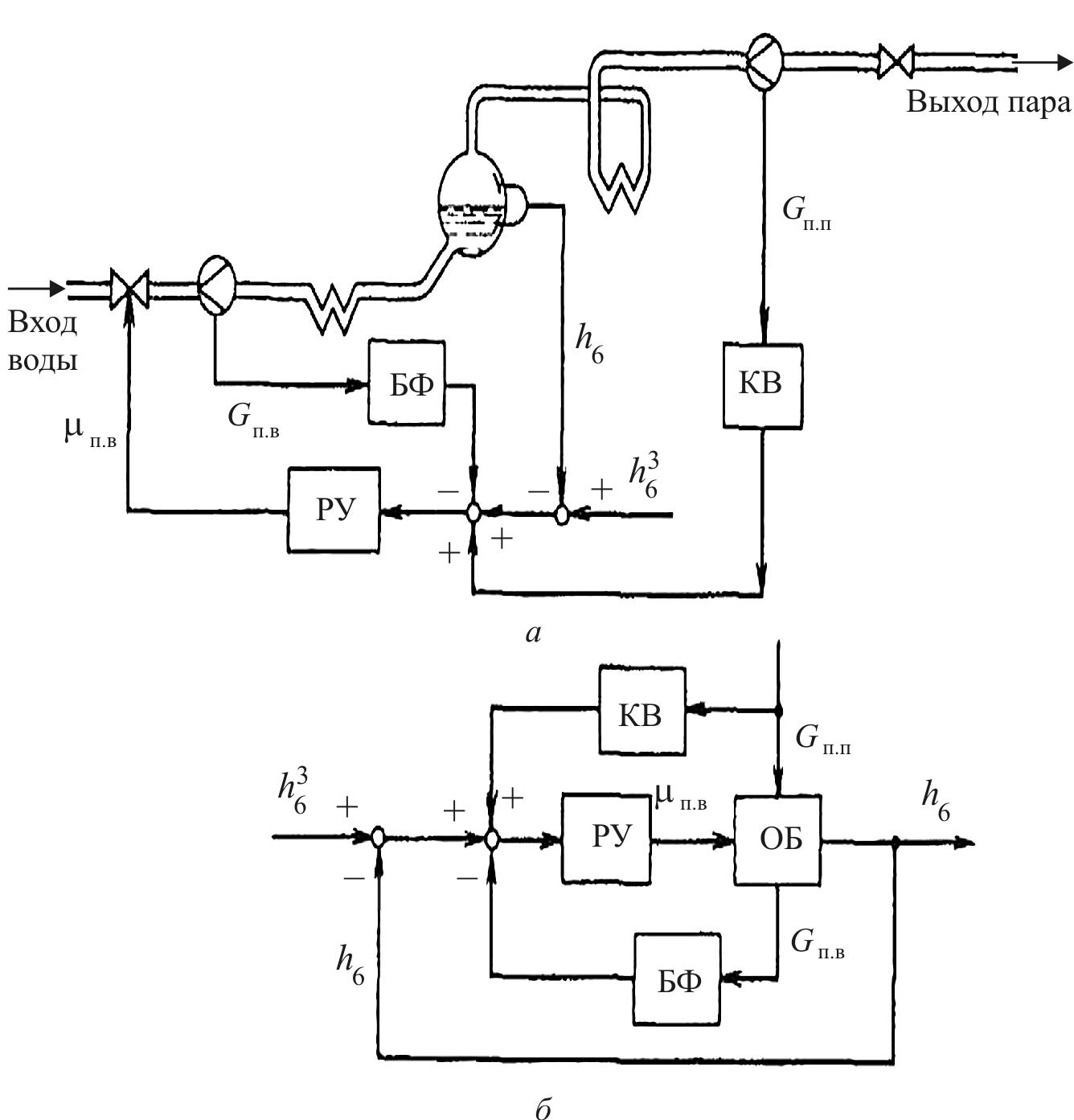
Рис. 14.10. Трехимпульсная схема регулирования уровня в барабане парового котла
Надежность работы котельного агрегата во многом определяется качеством регулирования уровня. Повышение уровня ведет к аварийным последствиям, так как возможен заброс воды в пароперегреватель, что вызовет выход его из строя. В связи с этим к точности поддержания заданного уровня предъявляются очень высокие требования.
Сигнал по расходу питательной воды Gп.в поддерживает материальный баланс между расходом воды и пара (то есть регулятор стремится уравнять расход воды и пара), делает регулирование более стабильным и независимым от изменения давления питательной воды.
Сигнал по расходу пара Gп.п позволяет регулятору быстрее реагировать на изменение нагрузки, также получать нужную величину и знак (направление движения ИМ) регулирования.
Основным узлом регулятора питания является процессор (электронный прибор типа РС29 или микропроцессорный контроллер типа «Ремиконт»), в котором соответствующим образом суммируются сигналы по уровню в барабане, расходу перегретого пара и расходу питательной воды и сравниваются с заданием.
Регулирование температуры перегретого пара
Регулирующее воздействие на температуру перегретого пара осуществляется путем изменения расхода питательной воды на впрыск пароохладителя.
Схема системы регулирования температуры перегретого пара за пароперегревателем ПП приведена на рис. 14.11. Это схема со вспомогательной внутренней регулируемой величиной – температурой пара непосредственно за пароохладителем ПО. Осуществляемое в блоке формирования (БФ) формирование сигнала должно обеспечить исчезновение его воздействия на задатчик регулятора температуры РТР в установившихся режимах. Использование информации о вспомогательной регулируемой

Рис. 14.11. Двухимпульсная схема регулирования температуры перегретого пара
величине позволяет изолировать основную регулируемую величину от возмущений, идущих со стороны пароохладителя ПО (от изменений температуры пара на входе в пароохладитель и самопроизвольного изменения расхода охлаждающей воды). Регулирующим воздействием является изменение положения клапана подачи охлаждающей воды на пароохладитель. Имеет место каскадное регулирование.
Применение двухимпульсной схемы регулирования температуры перегретого пара связано с запаздыванием и инерционностью объекта регулирования – пароохладителя. Поэтому и берутся упреждающий сигнал по скорости изменения температуры пара за пароохладителем.
При горении топлива его горючие составляющие – углерод и водород – вступают в химическое взаимодействие с кислородом. В результате при горении углерода образуется углекислый газ, при горении водорода – водяные пары. В большинстве случаев кислород для горения поступает из воздуха.