

Билет №12
Математическое обеспечение систем управления станками
Интерполяция – переделываю, подновляю, восстанавливаю (формообразование, т.е. согласованное движение по осям).
“СЧПУ Н22».
Интегратор выполнен на ПКЧ (преобразователь код-частота), для двух координат в двоичном коде для линейной и круговой интерполяции, используя алгоритм оценочной функции.
В этом случае на каждом шаге решается алгебраическое уравнение траектории.
Для линейной интерполяции:
 –в
непрерывной форме, где y,
x
принимаем положительными (1-й квадрант).
–в
непрерывной форме, где y,
x
принимаем положительными (1-й квадрант).
 –в
дискретной форме в i-ом
такте интегрирования.
–в
дискретной форме в i-ом
такте интегрирования.
 –оценочная
функция (рис.4.), т.е ошибка между непрерывной
величиной и её дискретной формой.
–оценочная
функция (рис.4.), т.е ошибка между непрерывной
величиной и её дискретной формой.

Если F>0, то в следующем такте надо делать перемещение по x, если F<0, то по y.
Определим
оценочную функцию в следующем такте,
если сделали перемещение (один импульс
по y
или по x).
Учитывая, что
 ,
, ,
имеем
,
имеем


Т.о. на каждом шаге интегрирования надо рассчитывать оценочную функцию. На практике, если имеет место перемещение по меньшей координате, то производят перемещение и по большой координате.
СЧПУ «Н33»
Интегратор выполнен на ПКЧ параллельного действия, работающем в двоичном коде. Способ интегрирования называется – цифровым дифференциальным анализатором. Это наиболее совершенная аппаратная стойка ЧПУ. Вначале она реализовывалась на простых микросхемах, затем на БИС.
Блок задания скорости (БЗС) аппаратной стойки ЧПУ.
На примере СЧПУ Н33 рассмотрим структуру блока задания скорости, его связи с интерполятором и выходным блоком.
Функции БЗС:
Отработка перемещений с заданной скоростью подачи;
Разгон в начале отработки кадра;
Торможение на стыке кадров при смене скорости подачи;
Автоматическое поддерживание постоянной контурной скорости при мгновенных включениях в работу одной, двух, трех координат;
Ручное управление оператором с шагом
 в пределах
в пределах .
.
Структура БЗС. (рис. .5.)
С перфоленты код скорости подачи записывается в буферный регистр ввода информации. В рабочем регистре находится выполняемый кадр управляющей программы. Наличие двух регистров позволяет заблаговременно записать и подготовить очередной кадр с перфоленты во время исполнения записанного кадра в рабочем регистре.
Заметим, что сами интеграторы интерполятора выполнены также как преобразователи код-частота параллельного действия. В целом, структура взаимодействия интерполятора, блока задания скорости, выходного блока имеет вид, показанный на рисунке 7.
Микропроцессорные стойки чпу
Первоначально микропроцессорные СЧПУ, проведя интерполяцию программным путем, выдавали задание в двоичном коде на фазовую систему связи с электроприводом (см. рис. 10.7, 10.8).
В дальнейшем от фазовых устройств связи с электроприводом отказались, возложив такие операции, как сравнение задания и сигнала обратной связи, реализацию пропорционального регулятора положения, скоростную компенсацию задающего сигнала (частичная инвариантность по управлению), на ЭВМ.
Структура одного канала связи с приводом представлена на рис. 10.9. В обратной связи по положению с фазовращателем обычно используют как ПЧК при высоких скоростях, так и ПФК при малой скорости.
Если используется фотоимпульсный датчик положения, структура еще более упрощается. В канале обратной связи используется тогда ПЧК, а иногда и ПЧН для получения сигнала обратной связи по скорости (см. рис. 10.9).
Измерительные трансформаторы тока и напряжения.
Трансформаторы тока
Трансформаторы тока (ТТ) служат для разделения (изоляции) первичных и вторичных цепей, а так же для приведения величины тока к уровню удобному для измерения (стандартный номинальный ток вторичной обмотки 1 А или 5 А).
Устройство и схема включения ТТ показаны на рис. 2.1. ТТ состоит из стального сердечника С и двух обмоток: первичной (с числом витков wl) и вторичной (с числом витков w2). Часто ТТ изготовляются с двумя и более сердечниками. В таких конструкциях первичная обмотка является общей для всех сердечников (рис. 2.1,6). Первичная обмотка, выполняемая толстым проводом, имеет несколько витков и включается последовательно в цепь того элемента, в котором производится измерение тока, или защита которого осуществляется. К вторичной обмотке, выполняемой проводом меньшего сечения и имеющей большое число витков, подключаются последовательно соединенные реле и приборы.
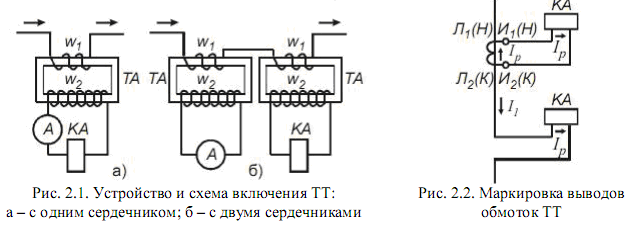
I1/ I2 = w2/ w1.
Отношение витков w2/ w1 называется коэффициентом трансформации (kI) ТТ.
I1/ I2 = kI.
Для правильного соединения ТТ между собой и правильного подключения к ним реле направления мощности, ваттметров и счётчиков, выводы обмоток ТТ обозначаются (маркируются) заводами-изготовителями следующим образом: начало первичной обмотки – Л1, начало вторичной обмотки — u1 конец первичной обмотки - Л2, конец вторичной обмотки – u2.
Для измерительных приборов погрешность относится к зоне нагрузочных токов 0,2-1,2Iном. Эта погрешность именуется классом точности и может быть равна 0,2; 0,5; 1,0; 3,0%.
ТТ, питающие релейную защиту, должны работать с достаточной точностью при прохождении токов КЗ, значительно превышающих номинальный ток ТТ. Для целей защиты выпускаются трансформаторы тока класса Р или Д (для дифференциальных защит) в которых не нормируется погрешность при малых (нагрузочных) токах. В настоящее время выпускаются трансформаторы тока классов 10Р и 5Р, погрешность которых нормируется во всем диапазоне токов.
Трансформаторы напряжения
Как и трансформаторы тока, трансформаторы напряжения (TН) выполняют две функции: служат для разделения (изоляции) первичных и вторичных цепей, а так же, для приведения величины напряжения к уровню удобному для измерения (стандартное номинальное напряжение вторичной обмотки: 100/57 В). TII работают в режиме близком к холостому ходу.

Трансформатор напряжения по принципу действия и конструктивному выполнению аналогичен силовому трансформатору. Как показано на рис. 2.6, трансформатор напряжения TV состоит из стального сердечника (магнитопровода) С, собранного из тонких пластин трансформаторной стали, и двух обмоток - первичной и вторичной, изолированных друг от друга и от сердечника.
Первичная обмотка w1 имеющая большое число витков (несколько тысяч) тонкого провода, включается непосредственно в сеть высокого напряжения, а к вторичной обмотке w2 имеющей меньшее количество витков (несколько сотен), подключаются параллельно реле и измерительные приборы.
U1 / U2x = w1/ w2.
Отношение чисел витков обмоток называется коэффициентом трансформации и обозначается
KU = w1 / w2.
Введя такое обозначение, можно написать:
U1 / U2x = KU
Если, к вторичной обмотке TН подключена нагрузка в виде реле и приборов, то напряжение на её зажимах U2 будет меньше ЭДС на величину падения напряжения в сопротивлении вторичной обмотки. Однако поскольку это падение напряжения невелико, оно не учитывается и пересчёт первичного напряжения на вторичное производится по формулам:
U1 = U2 KU U2 = U1 /KU
В зависимости от предельно допустимых погрешностей, TН подразделяются на классы точности. Трансформаторам, предназначенным для измерения, следует присваивать классы точности, выбираемые из ряда: 0,1; 0,2; 0,5; 1,0; 3,0. Трансформаторам, предназначенным для защиты, следует присваивать классы точности ЗР или 6Р. Трансформаторам присваивают один или несколько классов точности в зависимости от номинальных мощностей и назначения.
Для правильного соединения между собой вторичных обмоток TII и правильного подключения к ним реле направления мощности, ваттметров и счётчиков заводы-изготовители обозначают (маркируют) выводные зажимы обмоток определенным образом (см. рис 2.7): начало первичной обмотки - А, конец - X; начало основной вторичной обмотки - а, конец - х; начало дополнительной вторичной обмотки - ад, конец - хд.
Погрешность
напряжения f,
%, определяют по формуле

АСУ ТП
В АСУ ТП используется обычно четырехуровневая организация системы контроля и управления.
1. Уровень возникновения информации – по оборудованию это, в основном, датчики (первичные преобразователи), исполнительные механизмы. На этом уровне формируется первичная информация, поступающая в систему АСУ ТП, на этот уровень адресуются управляющие воздействия.
2. Уровень контроля и управления технологическим процессом. Данный уровень предлагается как достаточно автономный, который при отсутствии связи с верхним уровнем способен работать достаточное время без потери информации и осуществлять автономное управление – в обычном режиме и в аварийном. В качестве оборудования – здесь программируемые логические контроллеры, в качестве программного обеспечения – средства программирования этих контроллеров. На этом уровне, возможно, также производить переконфигурирование контроллеров и получать локальное отображение хода технологического процесса на специальные устройства вывода.
3. Уровень человекомашинных интерфейсов и операторского контроля и межпроцессового взаимодействия (это так называемые SCADA-системы ). На этом уровне в качестве оборудования используются рабочие станции оператора на RISC- или Intel-платформе, в зависимости от информационной нагруженности и требуемой надежности данного узла. Программное обеспечение представлено специальными продуктами для написания и конструирования SCADA-систем.
4. Последний, четвертый уровень – уровень информации, необходимой для управления предприятием. Это уровень интегрированной информационной системы предприятия, корпоративной базы данных и крупных финансовых предложений. По оборудованию этот уровень представлен файл-сервером, сервером базы данных, клиентскими компьютерами пользователей. Программными обеспечениями этого уровня являются СУБД архитектуры «клиент – сервер», большие финансовые приложения, корпоративная база данных предприятия.
Примеры АСУ ТП
Аналоговая системы регулирования ELMATIC-100 фирмы VALMET (Швеция), реализованной на 1 и 2 блоках Пермской ГРЭС в середине 80-х годов. В настоящее время фирма VALMET выпускает АСУТП DIMATIC XP.
«Проконтроль» фирмы АВВ, примененной на третьем блоке Пермской ГРЭС. Система «Деконтик К» (Проконтроль К) с жестким закоммутированием и передачей информации по проводам. Последняя версия Проконтроль П с передачей информации по моноканалу магистрального типа.
«ТДС 3000» фирмы HONEYWELL (США). Вначале фирма использовала на нижнем уровне магистраль данных МД. В настоящее время используется универсальная сеть управления USN с выходящими на нее универсальными управляющими и логическими контроллерами.
Общее для всех АСУ ТП следующее:
логические и управляющие контроллеры на нижнем уровне, обеспечивающие сбор, первоначальную или конечную обработку информации, управление объектом;
как правило, на нижнем уровне используется полевая шина (FILDBUS) со скоростью передачи до 250 кбод;
технологическая шина (другие названия: станционная, универсальная сеть управления, локальная сеть управления, системная, производственная, управляющая и др.), как правило, специфична для каждой АСУ ТП, исходя из особенностей применения АСУ ТП и используемого фирмой оборудования;
системная шина (другие названия: дистанционная, ЛВС, ARCNET, ETHERNET, DECNET, NES, X25, TSP/IP, NOVELL/IP и др.), как правило, универсальна.
Модель OSI с 7-го уровня, называемого прикладным, на котором пользовательские приложения обращаются к сети. Модель OSI заканчивается 1-м уровнем — физическим. Любой протокол модели OSI должен взаимодействовать либо с протоколами своего уровня, либо с протоколами на единицу выше и/или ниже своего уровня. Взаимодействия с протоколами своего уровня называются горизонтальными, а с уровнями на единицу выше или ниже — вертикальными. Любой протокол модели OSI может выполнять только функции своего уровня и не может выполнять функции другого уровня, что не выполняется в протоколах альтернативных моделей.