

Позиционные кодовые счпу
Используется в позиционных системах станков и роботов (рис. 10.1), особенно в ранних версиях.
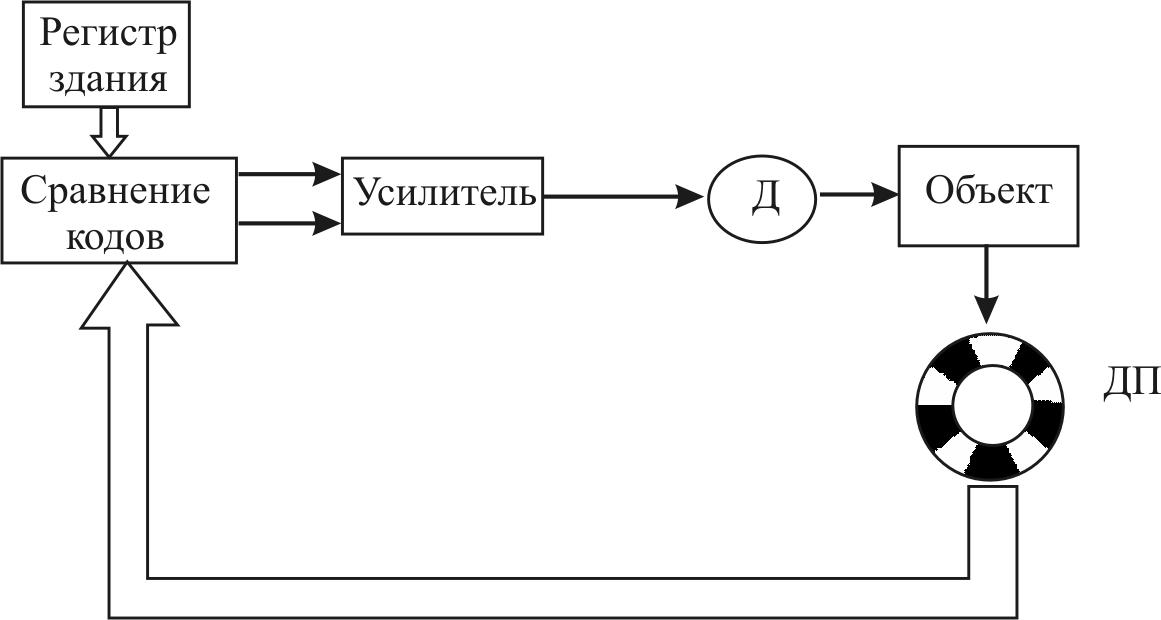
Рис. 10.1. Позиционная кодовая СЧПУ
Основное достоинство данной системы – абсолютная система координат, что увеличивает надежность системы из-за отсутствия накопления ошибок со временем.
Это достигается за счет кодового датчика положения, работающего в коде Грея. Датчики положения имеют от 12 до 16 разрядов, что позволяет получить высокую точность.
Позиционная счетно-импульсная СЧПУ
Используется в позиционных системах ЧПУ роботов и станков (рис. 10.2). Система использует импульсный датчик положения, т.е. она реализует относительную систему отсчета координат. В связи с этим в таких системах после включения источников питания осуществляется «нулирование». При этой операции осуществляется движение до точки, координаты которой определены в координатах объекта. Проходя через эту точку, можно от нее отсчитывать координаты всех задаваемых в программе позиционных точек. После отключения и повторного включения питания информация о положении, где же произошла остановка по координатам, теряется. Поэтому снова требуется производить «нулирование».
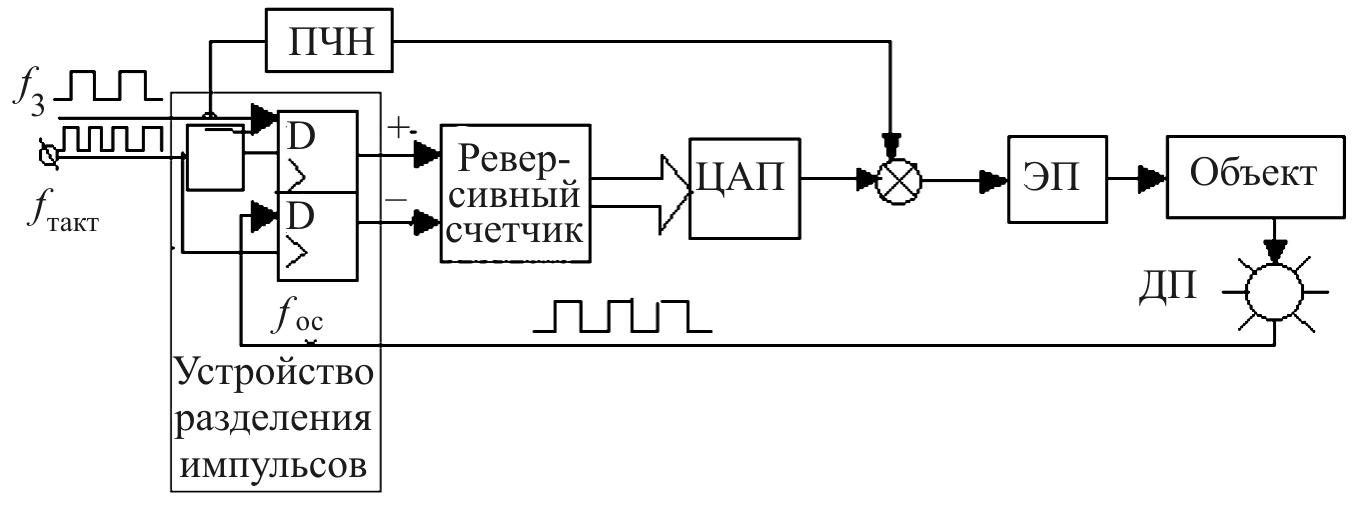
Рис. 10.2. Структура позиционной счетно-импульсной СЧПУ
Счетчик здесь работает на вычитание импульсами обратной связи. Задание должно быть в приращениях к предыдущему состоянию позиции.
Тенденции в развитии средств автоматизации в металлообработке
Можно выделить следующие общие тенденции развития электроприводов, имеющие устойчивый характер:
постоянно расширяющееся применение регулируемых электроприводов в промышленном оборудовании;
замена нерегулируемых электроприводов регулируемыми в энергоемком оборудовании (насосы, компрессоры, вентиляторы и др.) с целью энергосбережения.
распространение блочно-модульных принципов построения электроприводов, информационных средств, средств управления и систем управления в целом;
динамичная компьютеризация электроприводов, механизмов, агрегатов и комплексов и новая идеология проектирования систем;
дальнейшее развитие методов каскадного (подчиненного) управления, получивших широкое распространение в электроприводах;
активное развитие и внедрение систем диагностирования, обслуживания, визуализации технологических процессов и процессов управления.
Структура промышленных МПС постоянно совершенствовалась. Вначале развивались однопроцессорные МПС с одним вычислителем, решающим все задачи. Ресурсов вычислительной системы обычно не хватает, что ограничивает развитие функциональных возможностей системы управления
Тенденцией развития локальных МПС является все более широкое применение микропроцессорных контроллеров, которые берут на себя решение определенных задач управления, обработки информации, освобождая от рутинных (повторяющихся) задач ведущий вычислитель. Роль контроллеров непрерывно возрастает и иногда может стать доминирующей.
Последние достижения в технике управления, компьютерной технологии и создания высокопроизводительных исполнительных механизмов позволяют реализовать в станках новые способы управления. Примерами новых решений являются интеллектуальные СЧПУ с открытой архитектурой. Такие системы отличаются высокой надежностью, удобством обслуживания, возможностью взаимодействия с Интернетом. Они имеют быстродействующий последовательный интерфейс, большой объем памяти. Предусмотрена защита станка от сбоев в подаче питания, дистанционная система диагностики и др.
Расчёт токов короткого замыкания
Общие сведения о коротких замыканиях
При возникновении КЗ общее электрическое сопротивление цепи системы электроснабжения уменьшается, вследствие чего токи в ветвях системы резко увеличиваются, а напряжения на отдельных участках системы снижаются.
Основные виды коротких замыканий в электрических системах:
Трёхфазное КЗ, при котором все три фазы замыкаются между собой в одной точке. Точка трехфазного КЗ обозначается
 .
Токи, напряжения, мощности и другие
величины, относящиеся к трехфазному
КЗ, обозначаются
.
Токи, напряжения, мощности и другие
величины, относящиеся к трехфазному
КЗ, обозначаются ,
, ,
, и т.д.
и т.д.Двухфазное КЗ, при котором происходит замыкание двух фаз между собой. Точка двухфазного КЗ условно обозначается
 .
Токи, напряжения, мощности и другие
величины, относящиеся к двухфазному
КЗ, обозначаются
.
Токи, напряжения, мощности и другие
величины, относящиеся к двухфазному
КЗ, обозначаются ,
, ,
, и т.д.
и т.д.
3. Однофазное
КЗ,
при котором происходит замыкание одной
из фаз на нулевой провод или землю.
Условное обозначение точки однофазного
КЗ
 Токи, напряжения, мощности другие
величины, относящиеся однофазному КЗ,
обозначаются
Токи, напряжения, мощности другие
величины, относящиеся однофазному КЗ,
обозначаются ,
, ,
, и т.д.
и т.д.
Встречаются и другие виды КЗ, связанные с обрывами проводов и одновременными замыканиями провод различных фаз.
Мгновенное
значение полного тока КЗ для произвольного
момента времени: (3.1)
(3.1)
где
 - действующее значение периодической
составляющей тока КЗ;
- действующее значение периодической
составляющей тока КЗ; - апериодическая составляющая тока КЗ
в момент времени
- апериодическая составляющая тока КЗ
в момент времени ;
; - угловая частота переменного тока;
- угловая частота переменного тока; - фазовый угол напряжения источника в
момент времени
- фазовый угол напряжения источника в
момент времени ;
; - угол сдвига тока в цепи КЗ относительно
напряжения источника;
- угол сдвига тока в цепи КЗ относительно
напряжения источника; - постоянная времени цепи КЗ;
- постоянная времени цепи КЗ; - индуктивность, индуктивное и активное
сопротивление цепи КЗ.
- индуктивность, индуктивное и активное
сопротивление цепи КЗ.
Допущения и расчётные условия. Для облегчения вычислений токов КЗ принимают ряд допущений:
1) ЭДС всех источников считаются совпадающими по фазе;
2)
ЭДС источников, значительно удаленных
от места КЗ ( ),
считают неизменными;
),
считают неизменными;
3) не учитывают поперечные ёмкостные цепи КЗ (кроме воздушных линий 330 кВ и выше и кабельных линий 110 кВ и выше) и токи намагничивания трансформаторов;
4)
активное сопротивление цепи КЗ учитывают
только при соотношении
 ,
где
,
где
 и
и - эквивалентные активные и реактивные
сопротивления короткозамкнутой цепи;
- эквивалентные активные и реактивные
сопротивления короткозамкнутой цепи;
5) в ряде случаев не учитывают влияние нагрузок (или учитывают приближенно), в частности влияние мелких асинхронных и синхронных двигателей.
В соответствии с целью определения токов КЗ устанавливают расчётные условия, которые включают в себя составление расчётной схемы, определение режима КЗ, вида КЗ, мест расположения точек КЗ и расчётного времени КЗ.
При определении режима КЗ в зависимости от цели расчёта определяют возможные максимальные и минимальные уровни токов КЗ. Так, например, проверку электротехнического оборудования на электродинамическое и термическое действие токов КЗ осуществляют по наиболее тяжелому режиму - максимальному, когда через проверяемый элемент протекает наибольший ток КЗ. Наоборот, по минимальному режиму, соответствующему наименьшему току КЗ, осуществляют расчёт и проверку работоспособности устройств релейной защиты и автоматики.
Выбор вида КЗ определяется целью расчёта токов КЗ. Для определения электродинамической стойкости аппаратов и жестких шин в качестве расчётного принимают трёхфазное КЗ; для определения термической стойкости аппаратов, проводников - трёхфазное или двухфазное КЗ в зависимости от тока. Проверку отключающей и включающей способностей аппаратов проводят по трёхфазному или по однофазному току КЗ на землю (в сетях с большими токами замыкания на землю) в зависимости от его значения.
Выбор вида КЗ в расчётах релейной защиты определяется её функциональным назначением и может быть трёх-, двух-, однофазным и двухфазным КЗ на землю.
Места расположения точек КЗ выбирают таким образом, чтобы при КЗ проверяемое электрооборудование, проводники находились в наиболее неблагоприятных условиях. Например, для выбора коммутационной аппаратуры необходимо выбирать место КЗ непосредственно на их выходных зажимах, выбор сечения кабельной линии производят по току КЗ в начале линии. Места расположения точек КЗ при расчётах релейной защиты определяют по ее назначению - в начале или конце защищаемого участка.
Расчётное время КЗ. Действительное время, в течение которого происходит КЗ, определяется длительностью действия защиты и отключающей аппаратуры,
 . (3.8)
. (3.8)
В расчётах используют приведенное (фиктивное) время - промежуток времени, в течение которого установившийся ток КЗ выделяет то же количество тепла, которое должен выделить фактически проходящий ток КЗ за действительное время КЗ.
Приведенное время, соответствующее полному току КЗ,
 . (3.9)
. (3.9)
где
 - приведённое время для периодической
составляющей тока КЗ;
- приведённое время для периодической
составляющей тока КЗ;
 -
приведённое время для апериодической
составляющей тока КЗ.
-
приведённое время для апериодической
составляющей тока КЗ.
3. Автоматизация водогрейных котельных установок. Контур подачи топлива. Схема водяного тракта котельной установки. САР температуры на выходе котельной установки и температуры сетевой воды. Выбор технических средств (датчики, регуляторы, ИМ и т.д.), используемых в данной системе автоматизации.
Основное направление автоматизации котельных в настоящее время – создание комплексных систем контроля, защиты и регулирования, обеспечивающих автоматизацию взаимосвязанных основных технологических процессов в котлах и вспомогательного оборудования котельных.
Система автоматического регулирования осуществляет автоматический пуск и остановку электродвигателей котельной по заданной программе с соблюдением технологической последовательности включения/выключения механизмов, с предельно допустимой минимизацией длительности и оптимизацией параметров переходных режимов вентиляции и розжига котла. Система обеспечивает автоматическое управление механизмами во всем диапазоне изменения производительности котла, в том числе и при изменении числа действующих каналов подачи топлива (горелок, форсунок и т.п.).
Из описания технологического процесса следует, что основными регулируемыми параметрами котельной установки являются:
расход, температура и давление пара (воды) в выходном тракте;
подача воздуха в функции топливоподачи, т.е. с поддержанием зависимости «топливо – воздух»;
подача топлива в зависимости от необходимой производительности котла, т.е. заданных расхода, температуры, давления выходного теплоносителя (в водогрейных котельных – только температуры);
подача воды питательными, сетевыми, подпиточными насосами в функции потребления;
поддержание постоянного разряжения в топочной камере с помощью дымососов.
В систему автоматического управления котла входят основные локальные системы автоматического регулирования:
1) САР тепловой нагрузки котла;
2) питания котла (уровня воды в барабане);
3) разряжения в топке котла;
4) общего воздуха;
5) температуры перегретого пара;
6) непрерывной продувки.
Известно, что высокое качество сгорания топлива возможно только при вполне определенном подводе воздуха в топку. На рис. 14.4 представлена схема САУ, получившая название «топливо – воздух», которая решает задачу. Регулятор подачи воздуха в топку Рв воздействует на регулирующий орган подачи воздуха. На его вход подается разность между действительным расходом воздуха Gв и его заданным значением G3 в, которое вырабатывается в командном блоке (КБ) в зависимости от изменения расхода топлива Gт по заранее составленной режимной карте. Режимная карта может быть скорректирована подачей воздействия α.

