

Линеаризация нелинейных систем
Рассмотрим нелинейную автономную систему
![]() .
.
Пусть
![]() - неподвижная точка нелинейной системы
- неподвижная точка нелинейной системы![]() .
Будем исследовать поведение решения в
окрестностях стационарного состояния
.
Будем исследовать поведение решения в
окрестностях стационарного состояния![]() .
Введём вектор отклонений решения от
.
Введём вектор отклонений решения от![]() :
:![]() .
Элементы вектора
.
Элементы вектора![]() называютсялокальнымикоординатами в точке
называютсялокальнымикоординатами в точке![]() .
.
Исходная нелинейная
система уравнений в окрестности точки
![]() аппроксимируется с помощью разложения
функции правых частей системы уравнений
в ряд Тейлора. Сохраним члены ряда до
первого порядка включительно:
аппроксимируется с помощью разложения
функции правых частей системы уравнений
в ряд Тейлора. Сохраним члены ряда до
первого порядка включительно:

Для стационарного решения имеем
![]()
и из разложения получаем
![]()
или в матричной записи
![]() ,
,
где
 ,
i=1,...,n,
j=1,...,n.
,
i=1,...,n,
j=1,...,n.
J
- матрица Якоби, причем
значения всех производных берутся в
точке![]() .
Полученная система
уравнений представляет собой линейную
систему уравнений с постоянными
коэффициентами и называетсялинеаризациейнелинейной системы
.
Полученная система
уравнений представляет собой линейную
систему уравнений с постоянными
коэффициентами и называетсялинеаризациейнелинейной системы![]() в точке
в точке![]() .
Для её исследования можно воспользоваться
результатами анализа линейных систем.
.
Для её исследования можно воспользоваться
результатами анализа линейных систем.
Говорят, что стационарная
точка являетсяпростойнеподвижной
точкой нелинейной системы![]() ,
если соответствующая линеаризованная
система проста.
,
если соответствующая линеаризованная
система проста.
Следующая теорема устанавливает связь фазового портрета нелинейной системы в окрестности некоторой простой неподвижной точки с фазовым портретом ее линеаризации.
Теорема о линеаризации.Пусть нелинейная система![]() имеет простую неподвижную точкуx*.
Тогда в окрестности этой точки фазовые
портреты системы и ее линеаризации
будуткачественно эквивалентны,
если только неподвижная точка
линеаризованной системы не являетсяцентром.
имеет простую неподвижную точкуx*.
Тогда в окрестности этой точки фазовые
портреты системы и ее линеаризации
будуткачественно эквивалентны,
если только неподвижная точка
линеаризованной системы не являетсяцентром.
Принимая эту теорему без доказательства, отметим лишь, что особые точки типа узел, фокус и седло относят к так называемымгрубымособым точкам: их характер не меняется при малых возмущениях правых частей исходной нелинейной системы. Особая же точкацентр-негрубаяточка: характер фазовых траекторий в ее окрестности меняется уже при малых изменениях правых частей системы дифференциальных уравнений. При этом центр превращается в устойчивый или в неустойчивый фокус.
Г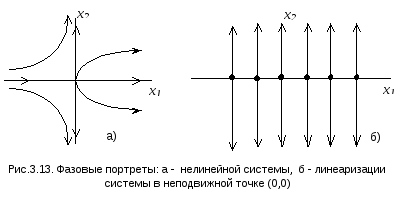 оворят
что неподвижная точка нелинейной системынепростая, если соответствующая
точка линеаризованной системы является
непростой. Фазовые портреты нелинейной
системы и ее линеаризации в этом случае
могут качественно отличаться.
Характер локального фазового
поведения определяется теперь нелинейными
членами. Поэтому, в отличие от простых
неподвижных точек, существует бесконечно
много различных типов локальных фазовых
портретов нелинейных систем в окрестности
непростых неподвижных точек. На рис.3.13
приведены фазовые портреты нелинейной
системы
оворят
что неподвижная точка нелинейной системынепростая, если соответствующая
точка линеаризованной системы является
непростой. Фазовые портреты нелинейной
системы и ее линеаризации в этом случае
могут качественно отличаться.
Характер локального фазового
поведения определяется теперь нелинейными
членами. Поэтому, в отличие от простых
неподвижных точек, существует бесконечно
много различных типов локальных фазовых
портретов нелинейных систем в окрестности
непростых неподвижных точек. На рис.3.13
приведены фазовые портреты нелинейной
системы![]() и ее линеаризации
и ее линеаризации![]() в стационарной точке этой системы (0,0).
в стационарной точке этой системы (0,0).
Предельные циклы
Известно, что в случае особой точки типа центра некоторая область фазовой плоскости сплошь заполнена замкнутыми траекториями. Вместе с тем возможна и более сложная ситуация, когда имеется изолированная замкнутая траектория, т. е. траектория, в некоторой окрестности которой нет других замкнутых траекторий. Последний случай непосредственно связан с решением вопроса о существовании изолированных периодических решений. При этом интересно, что изолированные замкнутые траектории могут иметь только нелинейные дифференциальные уравнения и системы.
Изолированные периодические решения соответствуют самым разнообразным свойствам явлений и процессов, происходящих в биологии и радиофизике, в теории колебаний и астрономии, в медицине и теории конструирования приборов. Такие решения возникают при изучении дифференциальных моделей в экономике, при рассмотрении различных вопросов автоматического регулирования, самолетостроения и т. д. Здесь же мы рассмотрим как пример нелинейную дифференциальную систему
![]()
![]() .
.
Чтобы решить ее, введем полярные координаты r,,гдеx=rcos, y=rsin.Тогда, продифференцировав соотношенияx2+y2=r2 и=arctg(y/x)поt, получим равенства
![]()
![]() .
.
Умножая первое уравнение исходной системы на x, а второе - наyи складывая, с учетом первого находим, что
![]() .
.
Если же умножить второе уравнение исходной системы на x, а первое - наyи вычесть, с учетом второго равенства получим соотношение
![]() .
.
Система имеет единственную
особую точку
![]() .
Так как мы интересуемся сейчас только
построением траекторий, то можно считать
.
Так как мы интересуемся сейчас только
построением траекторий, то можно считать![]() .
А это означает, что система приводится
к виду
.
А это означает, что система приводится
к виду
![]() ,
,
![]() .
.
Каждое из полученных уравнений системы легко интегрируется, и все семейство решений, как нетрудно видеть, задается формулами
![]()
или в старых
переменных
![]() и
и![]() формулами
формулами
![]()
![]()
Если теперь в первом
уравнении системы положить
![]() ,
то получим
,
то получим![]() .
Эти равенства определяют замкнутую
траекторию - окружность
.
Эти равенства определяют замкнутую
траекторию - окружность![]() .
Если
.
Если![]() ,
то ясно, что
,
то ясно, что![]() и
и![]() при
при![]() .
Если же
.
Если же![]() ,
то
,
то![]() и снова
и снова![]() при
при![]() .
Это означает, что существует единственная
замкнутая траектория
.
Это означает, что существует единственная
замкнутая траектория![]() ,
к которой все остальные траектории с
течением времени приближаются по
спиралям (рис. 3.14).
,
к которой все остальные траектории с
течением времени приближаются по
спиралям (рис. 3.14).
З
Рис.3.14.
Фазовый портрет, содержащий замкнутую
изолированную траекторию Рис.3.14.Фазовый
портрет, содержащий замкнутую
изолированную траекторию
Предельные циклы не всегда имеют вид окружностей, и не всегда их можно обнаружить, просто перейдя к полярным координатам. Не существует общих методов определения областей, содержащих предельные циклы, и поэтому успех зависит как от вида системы, так и от опыта исследователя.