

книги из ГПНТБ / Пузырев В.А. Тонкие ферромагнитные пленки в радиотехнических цепях
.pdfтолько потери, определяемые сопротивлением намотанной катушки), так и от величины сопротивления нагрузки /?,,. Максимально возможное значение добротности выходного
контура модулятора Q при неизменной конструкции |
внеш |
ней системы равно Qmax I/?„= со = (р2 /г)со0 С, где р = |
уТ/С. |
|
|
|
|
|
Р и с . |
2.8 |
|
|
О т к у д а |
Q / Q m a x = l / [ l |
+ (p2 //'5„)]- Обозначая в (2.19) |
||||||
|
e m a x |
= |
Q m a x |
Л |
VMJV |
1 + [ 2 K - v ) / 8 p , |
||
д л я ш0 = |
v получаем |
|
|
|
|
|
||
|
|
|
е(0)/етях= |
1/И +(?VrR„)]. |
(2.22) |
|||
Теоретические |
зависимости |
е ( 0 ) / е т а х |
от |
сопротивления |
||||
нагрузки |
RH |
(для р = |
|
138 Ом, г = 7,5 |
Ом, |
Л2„ = 1, / „ = |
||
= 40 мА и /„ = |
80 мА) приведены на рис. 2.9. На этом ж е |
|||||||
рисунке дл я сравнения нанесены аналогичные эксперимен тально снятые зависимости.
Одним из в а ж н ы х параметров модуляционного устройства является угол направления управляющего
80
О |
800 |
1600 |
2400 |
RH,OM |
Ри с . 2.9
поля р. Величина (30pt зависит от соотношения H J H K , ко торое косвенно характеризует дисперсионные свойства пленки, обусловленные ее неоднородностями. В табл . 2.1
приведены данные, характе - ризующие эту зависимость. С увеличением отношения
гт trr
Т а б л и ц а *>1
"
Н л и „ |
tj 1 н |
й , |
помер |
л с |
/ п к величина угла |
p0 pt па- |
пленки |
я с к |
r opt |
|||
дает. При этом возрастает |
|
0,01 |
50° |
|||||
возможность |
увеличения пе |
|
||||||
редаваемой |
мощности. |
\ |
0,018 |
48° |
||||
0,086 |
45° |
|||||||
|
Н а и б о л е е |
полное |
пред- |
3 |
||||
|
0,164 |
41° |
||||||
ставление о влиянии величи- |
4 |
0,197 |
30° |
|||||
ны |
угла p o p t |
на выходной |
5 |
|
|
|||
сигнал при |
заданных |
значе- |
|
|
|
|||
ниях управляющего поля, не превышающего оптимальной величины, можно получить из экспериментального графика рис. 2.10.
Эффективность модуляционного устройства м о ж н о оценить величиной отношения выходной мощности к пол ной мощности, подводимой к пленке на частоте несущей:
Л = ^ в ы х / (-^пл "Т~ -Рвых) .
где Рвых — выходная мощность высокочастотных коле баний; Р п л — мощность потерь в пленке.
На рис. 2.11 приведены экспериментально снятые за висимости эффективности модулятора от входной мощ-
81
/
Р и с . 2.11
ности. С определенного значения Рвх эффективность на чинает падать, что вызвано в основном влиянием гисте резиса (ростом потерь за счет частичного переключения пленки) . Пленки с меньшей величиной Gr имеют более крутой начальный участок зависимости (для оптималь ного значения управляющего поля Ну).
82
В импульсном р е ж и м е в качестве управляющего (мо дулирующего) сигнала используется импульсное поле, которое формируется управляющей обмоткой (рис. 2.12). Ф о р м а ' в ы х о д н о г о радиоимпульса обмоточного варианта модулятора определяется в основном у п р а в л я ю щ е й цепью, так как постоянные времени лленки, входной и выходной цепей гораздо меньше постоянной времени управляющей цепи.
| импульсов
Осцилло
граф
Р и с . 2.12
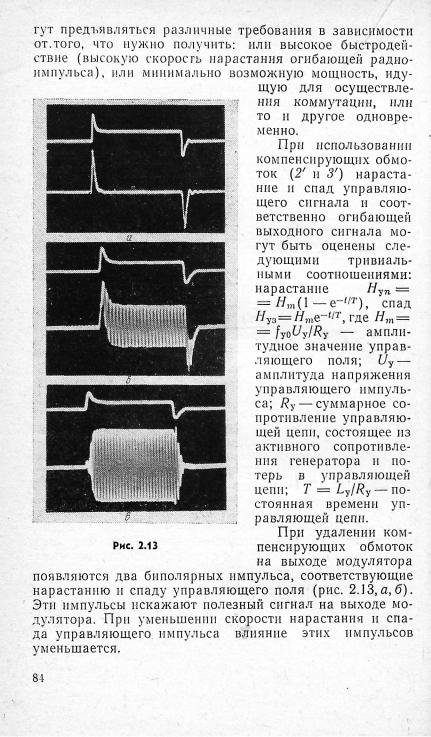
На рис. 2.13 показаны осциллограммы работы моду
лятора в |
импульсном р е ж и м е (несущая |
частота порядка |
20 М Г ц ) |
. Верхний луч соответствует |
н а п р я ж е н и ю на |
управляющей обмотке. Как можно видеть из осцилло грамм, форма огибающей выходного сигнала полностью определяется формой управляющего поля. Н а осцилло грамме рис. 2.13, а показаны управляющий (вверху) и выходной (внизу) сигналы при отсутствии входного вы сокочастотного сигнала и отключенных компенсирующих обмотках 2' и 3'. Пр и подаче входного сигнала без ком пенсирующих обмоток выходной сигнал будет иметь вид,
приведенный на |
рис. 2.13, б, |
а с включенной |
компенси |
|
рующей |
системой — н а рис. 2.13, е. |
|
||
Д л я |
описания |
поведения |
модулятора во |
время дей |
ствия плоской части импульсного управляющего поля
можно использовать |
уравнения (2.19) — (2.21), |
получен |
|
ные ранее. Как у ж е |
отмечалось, переходные |
процессы |
|
выходного радиоимпульса определяются в основном |
па |
||
раметрами управляющей цепи. К управляющей |
цепи |
мо- |
|
83
Влияние управляющей цепи на выходную цепь можно уменьшить в основном за счет увеличения ее постоянной времени. Это возможно "в тех случаях, когда параметр быстродействия несуществен. В противном случае необ ходимо прибегать к компенсирующим обмоткам .
Результаты теоретического исследования модуляцион ного устройства с достаточной д л я инженерной практики точностью совпадают с экспериментами . Полученные количественные характеристики позволяют выработать требования как к используемым в модуляторе пленкам, так и к внешним цепям. Рассмотренное модуляционное устройство может применяться в качестве амплитудного модулятора, балансного модулятора, а т а к ж е ключевого устройства.
2.2.2. Параметром
Использование в качестве нелинейного управляемо - • го элемента тонкой ферромагнитной пленки позволяет
повысить |
быстродействие |
и |
надежность параметрона . |
||
Однако |
для его успешного |
осуществления |
необходима |
||
работа |
по |
усовершенствованию технологии |
изготовления |
||
пленок. |
Первостепенной |
задачей в этом |
направлении |
||
является разработка способов создания пленок с неизме няющимися со временем параметрами, с малыми потеря ми, обусловленными различными эффектами, и с задан ными нелинейными характеристиками .
Теоретическое исследование параметронов на Т Ф П — достаточно трудоемкая задача . С целью иллюстрации применения эквивалентной схемы Т Ф П для количествен ного исследования тонкопленочного параметрона вос пользуемся методом гармонического баланса, применен
ного ранее д л я тех ж е целей |
[28]. |
Схема параметрона, так |
ж е как и модулятора, со |
стоит из сигнальной цепи (выходная цепь), цепи подкач
ки |
и нелинейного |
управляемого |
элемента — пленки |
||
(рис. |
2 . 14,а) . Цепь подкачки р а з в я з а н а |
с сигнальной |
за |
||
счет |
ортогонального |
расположения |
или |
обмоток, или |
по |
лосковых линий — в зависимости от рабочей частоты. В отличие от схемы модуляционного устройства, сигналь ный контур параметрона настроен на частоту, вдвое меньшую частоты входного сигнала (подкачки) . П о л е подкачки и поле смещения действуют вдоль легкого на правления пленки, а сигнальное поле — вдоль трудного.
85
Основные соотношения, характеризующие работоспо собность параметрона м о ж е м получить, исследуя стацио
нарный режим . Поведение пленки в параметроне |
описы |
||||||||||||||||
в а е т с я - у р а в н е н и е м |
(1.15). Введя |
следующие |
|
|
обозначе |
||||||||||||
ния: |
|
hn(t) = # p cos2oj £ — поле |
подкачки; |
/гт |
(t) = / у т — |
||||||||||||
искомое |
поле |
субгармоники |
(сигнальное); |
|
|
|
|
|
|
||||||||
|
|
|
|
Г = ( 1 + а Ч / М - г 2 ( Я к |
+ Я 0 л ) ; |
|
|
|
|
|
|||||||
|
|
•S = Я , . / ( / /к |
+ Я о.,,); |
В = Я 0 л / ( Я к + |
Я |
|
0 л ) ; |
|
|
||||||||
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
ни |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р и с . |
2.14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2Я = Я „ / ( Я К + Я 0 л ) ; |
|
|
|
|
|
|
|
||||||
Я 0 л |
— поле смещения; |
Я р — поле |
подкачки; |
|
|
перепишем |
|||||||||||
(1.15) |
в |
таком |
виде: |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ст ¥т + сдт + у- |
ф 2 |
|
|
|
|
|
|
|||||||
|
|
|
1 — Ф2 |
|
|
|
|
|
|
||||||||
|
|
|
5 ( 1 - Ф т ) + ( 5 - Ь 2 Я cos 2u>0 0 |
- Ф+т ) |
1 |
' |
2 |
X |
|
||||||||
|
|
|
|
|
Х Ч ' > ( 1 - Ф ? ) / Т 1 |
|
|
(2.23) |
|||||||||
где |
1 0 |
т |
= f y ^ 0 |
J ( H K |
+ |
Я й л ) , |
а |
¥ , ¥ — первая |
|
и |
вторая |
||||||
производные потокосцепления |
по времени |
соответственно. |
|||||||||||||||
Л е г к а я ось пленки |
совпадает |
с |
направлением |
X. |
|||||||||||||
Осуществляя переход к безразмерному времени |
х = coz!v |
||||||||||||||||
имее м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
( о 2 С Д т + « ) С 7 Д . г + |
|
1 |
7со2 |
Ф2 |
+ |
|
|
|||||||
|
|
|
|
|
1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
+ |
5 (1 - |
Ф;) + |
(В + |
2Р cos 2х) (1 - |
Ф2 .)!/2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
= |
( 1 - Ф ? ) / т . |
|
|
|
|
|
|
(2.24) |
|||
86
У р а в н е н ие (2.24), характеризующее состояние |
плен |
||||||
ки, |
содержит два неизвестных Ч г т |
и iy, |
которые |
связаны |
|||
е щ е |
одним уравнением — уравнением |
внешней цепи сиг |
|||||
нального контура, рис. 2.14,6. Используя |
закон |
Кирхго |
|||||
ф а , |
получаем |
|
|
|
|
|
|
|
1T = ^(4FT+L%)-C(VT |
|
+ L£jf). |
|
(2.25) |
||
Переходя к |
безразмерному времени и группируя |
|
слагае |
||||
мые, |
имеем |
|
|
|
|
|
|
<*>CWT + |
со ± ЧГТ + CZcp.2 ^ |
+ со \ |
^ 7 + ^ |
- |
°- ( 2 - 2 6 ) |
||
Решение системы уравнений (2.24) и (2.26) в стацио нарном режиме будем искать в виде суммы гармоник ря да Фурье:
« • т = 2 * т „ ( 0 . / т = 2 ' ' « ( О . |
|
||||||
где |
а„ cos /icotf + bn |
|
|
|
|||
WT „ (t) = |
sin лшг!; |
(2.27) |
|||||
/т„ (£) = |
сп |
cos /гсо^ -f- dn |
sin /ш£ |
||||
|
|||||||
или |
|
|
|
|
|
|
|
|
= |
A , cos ( л ш * - < р я ) ; |
\ |
|
|||
«те ( 0 |
= |
£ я c ° s |
(ЛА>* - |
ч п ) , |
J |
3 j |
|
г д е |
|
|
|
|
|
|
|
ср„ = arc t g (att/b„)\ |
т\п = |
arc t g |
(c„/rf„). |
|
|||
Необходимо найти |
условие |
устойчивых |
параметрических |
||||
колебаний и выразить |
эти условия |
к а к соотношения, ха |
|||||
рактеризующие связь м е ж д у эквивалентной схемой плен ки и сигнального контура.
Амплитуду тока t T сигнального |
контура параметрона |
|
д л я упрощения анализа р а з л о ж и м |
на квадратурные |
ком |
поненты, сдвинутые относительно |
потокосцепления |
на я |
и я/ 2 (рис. 2.15): |
|
|
|
|
|
Bn*u= |
Вп sin (с?„ — ц„), |
J |
|
||
где |
|
|
|
|
|
гп |
т> ^-^ ЯГГ-tn |
-b |
/ |
" |
(2.29) |
|
^ ^ a r c t g ^ " - |
|
|||
87
Подставляя (2.29) в (2.28), после несложных преобразо ваний получаем
В„„ = - а л + bndn
|
|
|
|
(2.30) |
|
0Пт.\1 = ' |
А„ |
|
|
|
|
|
|
|
В результате |
проделанных преобразований решение |
|||
системы (2.24), (2.26) будем искать в виде |
|
|||
Утп (О = |
Л COS (л<0*-<ри ), |
|
|
|
i ( 0 = _ ancn + bndn c o s ( / Ы |
_ } + |
(2.31) |
||
|
|
|
|
|
+ ~ & " с " sin (лш* - <?,,).
An
Р и с . 2.15
Согласно принципу гармонического баланса осуществим подстановку (2.31) в уравнение (2.26). После того как сгруппируем и приравняем нулю коэффициенты при си нусной и косинусной составляющих, будем иметь
Вак |
+ |
пВ„%,2 |
- |
nWCLB„ |
- |
л W |
А |
п |
= 0, |
Вп.,2 |
+ |
nBav |
- |
nWCLB„Tl9 |
~ |
^ |
А |
п = |
0. |
Решая эти уравнения относительно квадратурных компо нент сигнального тока, получаем
- £от ( |
« Л |
+ |
b„dn) |
= |
A2nF (л<о), |
j |
^от (a„d„ |
- |
6 я |
с я ) = |
A\G |
( Л Ш ) , |
J |
88
г де |
|
|
|
|
|
|
|
|
|
|
F (гш) = L 0 l |
ВИХ |
т |
1 |
- |
/ со |
\ 2 |
/ |
|
со2 |
|
An |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
С? (/гш) = |
Z b T |
ни/2 |
|
т |
|
|
|
|
|
|
|
|
со |
у |
|
|
|
||||
|
|
|
|
|
|
л — |
5) |
|
|
|
6 |
= |
р |
|
|
|
|
|
т |
= |
'-QT |
|
|
|
|
|
У LC |
Z. |
||||
Резонансный |
максимум |
и |
минимум |
функций G(nco) |
||||||
nF(nbi) |
оказывается |
около |
(/гш/соо)2 |
~ 1. |
Однако дей |
|||||
ствующая частота всегда будет ниже определяемой этим
•соотношением, |
так |
как |
среднее значение индуктивности |
||||||
зависит от амплитуды |
сигналов. |
|
|
||||||
Некоторые |
практически |
в а ж н ы е результаты |
могут |
||||||
быть получены |
из совместного решения |
уравнений |
(2.26) |
||||||
и линейной аппроксимации |
уравнения |
(2.24). Линейной |
|||||||
аппроксимации |
в ы р а ж е н и я |
(2.24) соответствует матема |
|||||||
тическая модель магнитосвязанной с внешними |
цепями |
||||||||
пленки |
в виде |
(1.21): |
|
|
|
|
|
||
С д , |
+ О Д , + • 1 |
|
|
|
|
|
|||
При / / т |
0 = |
0, / / л 0 |
О и Ал ( £ ) < / / л 0 можно принять, что |
||||||
О, |
поэтому //гл |
= 0, |
/?/т |
= 1 и |
|
|
|||
|
|
1 / £ д |
т « |
1 |
+ |
Ал (О |
|
|
|
|
|
|
|
|
|||||
Сучетом этих преобразований уравнение, характеризую
ще е поведение пленки после перехода к безразмерному времени может быть представлено в виде
ш 2 С Д , Ч - ш О Д 1 |
- Ь 7 ^ - ( 1 + 2 P C O S 2 T ) ¥ 1 = |
/ t , |
(2.33) |
|
где Mr i — переменная |
составляющая |
потокосцепления X FT ; |
||
L 0 t — вносимая в сигнальный контур за счет |
пленки ин |
|||
дуктивность; 2Р — относительная |
величина |
поля |
под |
|
качки.
* Для рассматриваемого случая в выражении для дифферен циальной индуктивности будем учитывать только знак плюс.
89