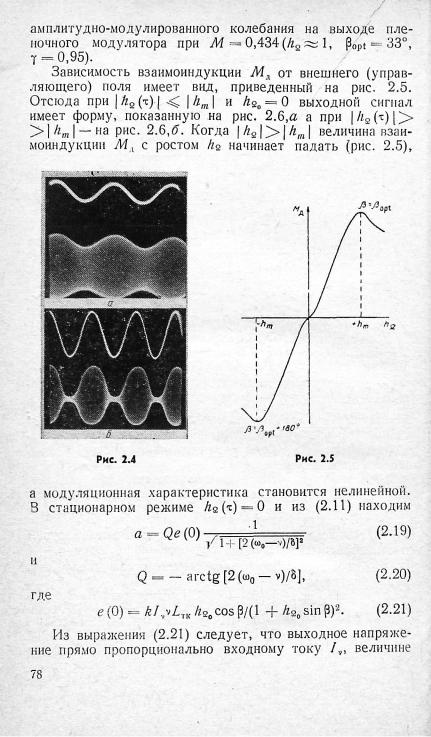
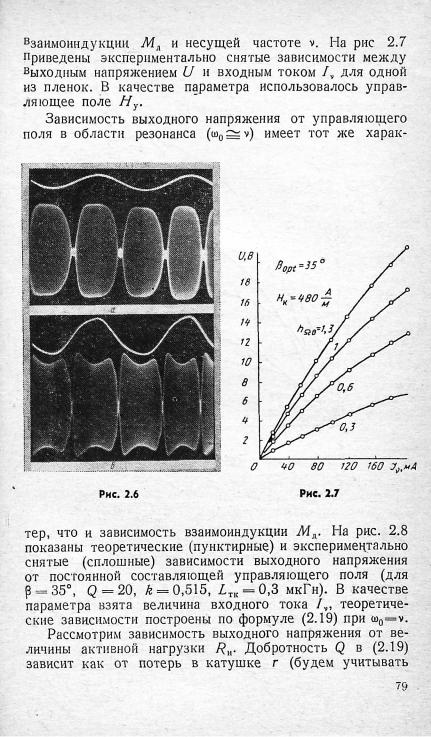
книги из ГПНТБ / Пузырев В.А. Тонкие ферромагнитные пленки в радиотехнических цепях
.pdfго он совершает колебательные движения под воздей
ствием |
высокочастотного |
поля |
Я Л ч . |
После |
|
снятия |
||||||
у п р а в л я ю щ е г о |
|
поля |
|
Ну |
в р а щ а ю щ и й |
момент |
ани |
|||||
зотропии |
(поле |
Я к ) |
в о з в р а щ а е т |
вектор |
намагниченно |
|||||||
сти М в исходное положение. Момент |
взаимодействия |
|||||||||||
его с высокочастотным |
полем |
//.„, в |
этом случае |
равен |
||||||||
нулю, п э. д. с. в выходной |
цепи не наводится (рис. 2.2, д). |
|||||||||||
Р а б о т у модуляционного |
устройства |
поясняют |
|
эпюры |
||||||||
рис. 2.2,6 — импульсная модуляция, |
в — простая |
ампли |
||||||||||
тудная модуляция, г — б а л а н с н а я |
модуляция . |
|
|
|||||||||
В случае реальной пленки физические процессы, ха |
||||||||||||
рактеризующие |
работу |
ключа, в |
значительной |
степени |
||||||||
у с л о ж н я ю т с я |
из-за ее |
неоднородности. |
|
|
|
|||||||
Н а п р а в л е н и е |
поля |
#.,,„ |
в этом |
случае |
выбирается та |
|||||||
ким образом, |
чтобы области, |
легкие |
оси которых |
распо |
||||||||
л о ж е н ы |
слева |
и справа |
от направления поля, давали оди |
|||||||||
наковый |
в к л а д в э . д . с , |
наводимую в выходной |
обмотке, |
|||||||||
т. е. суммарная э . д . с , наводимая в выходной обмотке от
«правых» и «левых» |
областей, |
д о л ж н а |
быть |
равна пулю. |
|||||
Э т о |
достигается простым вращением |
пленки до тех пор, |
|||||||
пока |
направление поля Я Л у |
не совпадает со средней |
лег |
||||||
кой |
осью пленки. |
|
|
|
|
|
|
|
|
Воздействие на |
пленку |
управляющего |
поля |
Я у |
под |
||||
углом |
р облегчает |
процесс |
|
формирования |
однородной |
||||
структуры намагниченности |
пленки. Процессы в |
пленке |
|||||||
в этом |
случае определяются |
в основном |
когерентным |
||||||
вращением . Наиболее справедливо такое предположение при управляющих полях /Уу , близких по величине полю анизотропии Нк или превышающих его. При уменьшении величины управляющего поля процессы, определяемые
неоднородностью структуры пленки, будут |
возрастать . |
Д л я осуществления балансной модуляции |
необходимо, |
чтобы управляющее поле (например, при гармонической
его форме) |
один |
полупериод |
подавалось |
под |
углом |
(3, |
|||
а другой — под углом л — ( 3 относительно |
трудной |
оси. |
|
||||||
Д л я исследования модулятора используем |
эквива |
||||||||
лентную |
схему |
магнитосвязаннон |
пленки |
(рис. |
1.6 |
||||
и 2.1,6), |
которая |
о т р а ж а е т динамику |
пленки |
в |
виде |
||||
уравнения |
|
четырехполюсника |
(1.21). |
Входной |
сигнал |
||||
(несущая) |
имеет частоту порядка 20 МГц, поэтому в ка |
||||||||
честве внешних цепей могут быть использованы |
катушки, |
||||||||
намотанные |
непосредственно |
на подложку с |
пленкой. |
||||||
В схеме модулятора к к л е м м а м выходной катушки под ключена нагрузка (емкость С и активное сопротивле-
70
ние R). |
Н а л и ч и е управляющей катушки в |
эквивалентной |
|
схеме |
отражено в изменяющихся |
параметрах дифферен |
|
циальных индуктивностей. |
|
|
|
В общем виде математическая |
модель |
р а с с м а т р и в а е |
|
могомодулятора представляет систему дифференциаль ных уравнений, состоящую из уравнения (1.15) и урав нения дл я выходной цепи модулятора с нагрузкой. Вы ходная цепь может быть представлена как последова
тельное соединение |
источника э. д. с. X FT , |
индуктивности |
||||||
выходной обмотки и нагрузки модулятора |
(параллельно |
|||||||
соединенные R |
и С). Д л я малого |
сигнала |
вместо уравне |
|||||
ния |
(1.15) |
воспользуемся его линейным приближением — |
||||||
уравнением |
(1.21). |
|
|
|
|
|||
Особенности |
режима |
работы |
модулятора позволяют |
|||||
упростить |
эквивалентную схему |
пленки. Так как несу |
||||||
щая |
частота |
равна |
20 |
М Г ц , то |
можно |
показать, что |
||
емкостная составляющая тока эквивалентной схемы, рав
ная |
/ с т = С |
и |
диссипативная |
составляющая |
ior |
= |
|||||||
= ОтхР1 |
на |
этой |
частоте |
пренебрежимо |
малы |
по |
сравне |
||||||
нию |
с индуктивной |
составляющей |
тока |
U |
= |
у- |
|
и мо- |
|||||
гут |
быть |
опущены. Д л я |
уравнения |
(1.21) это б у д е т |
спра |
||||||||
ведливо |
в |
том |
случае, если со2 /и>2 :>1, a |
v2/co2 |
< |
1 |
и |
||||||
28v/(u2 <^ 1, |
что |
соответствует выполнению |
неравенств |
||||||||||
'•с <^ h |
ч |
io <К IL |
• Тогда эквивалентная |
схема |
|
магни- |
|||||||
тт т т
тосвязанной пленки значительно упрощается и представ
ляет |
схему трансформатора, коэффициент взаимоиндук |
ции |
которого зависит от величины и направления управ |
ляющего поля. Чтобы показать выполнимость этих
условий, |
необходимо предварительно |
оценить |
величину |
||
и направление |
управляющего поля, от |
которого |
зависит |
||
величина |
со. |
|
|
|
|
Рассмотрим |
причины, з а с т а в л я ю щ и е подавать |
у п р а в |
|||
л я ю щ е е |
поле Ну под углом р к трудной оси. Теория |
коге |
|||
рентного в р а щ е н и я предсказывает возвращение М в ис
ходное положение при любом угле отклонения, |
меньшем |
||
90°, и переключение пленки в |
противоположное |
состоя |
|
ние при углах, превышающих |
90°. Отклонение на 90° со |
||
ответствует состоянию неустойчивого |
равновесия |
М, и он |
|
д о л ж е н перейти в одно из устойчивых |
состояний. |
О д н а к о |
|
на практике приложение и снятие поля насыщения в на правлении трудной оси вызывает разделение пленки на
71
п р о т и в о п о л о ж но намагниченные домены. З а счет неоднородностеп пленки ее размагничивание возможно и при полях, меньших поля насыщения .
Исследования величины максимального угла обрати мого отклонения М при воздействии поперечным полем проводились над пермаллоевыми пленками толщиной от
1000 до 3000 А и диаметром |
1 см |
[26]. Исследования по |
||||
к а з а л и , |
что максимальный |
угол |
обратимого |
отклоне |
||
ния М увеличивается с увеличением |
отношения |
Нс/Нк. |
||||
Б ы л и получены величины 0 |
т а х в диапазоне от 15° до 60°. |
|||||
Полученные данные свидетельствуют |
о том, что |
сущест |
||||
в у ю щ а я |
техника изготовления |
пленок позволяет |
осу |
|||
ществлять эффективную связь за счет пленки между об
мотками / и 2 лишь |
при |
определенных |
углах отклоне |
||
ния М от средней легкой |
оси пленки. При совпадении |
Ну |
|||
с трудным направлением |
пленки за счет неоднородно- |
||||
стей появляется возможность ее |
частичного перемагни- |
||||
чивания . |
|
|
|
|
|
Под воздействием |
входного |
высокочастотного |
поля |
||
в е к т о р намагниченности |
М „качается" |
относительно |
по |
||
ложения равнозесия, определяемого углом 0О. Поэтому
величина этого угла должна быть |
равной |
0 ( ) |
^ 4 5 ° . Д л я |
||
относительного управляющего поля |
/zs Ну/Нк |
^ |
1 (см. |
||
приложение |
1, рис. П1.1) находим |
значение' угла |
р ^ 20°. |
||
И, наконец, |
принимая 0О -= 45° и |
( 3 = 2 0 ° , |
из |
графиков, |
|
приведенных |
на рис. П1.2, определяем параметр ш2/со2 > 1. |
||||
Поэтому для низкочастотного обмоточного модулятора,
выходная цепь |
которого |
обладает фильтрующими |
свой |
||||||||
ствами, |
в эквивалентной |
схеме пленки дл я случая малого |
|||||||||
сигнала |
можно пренебречь |
емкостной / с |
и диссипативной |
||||||||
in |
составляющими токов, |
так как остальные |
параметры |
||||||||
т |
|
|
|
|
|
|
|
|
|
|
|
v2 /(o2 |
<С 1 и |
2 O V / M 2 < $ T 1 . |
С |
увеличением |
угла р |
отношение |
|||||
(|)2/ш2 |
б у д е т |
возрастать. |
|
|
|
|
|
|
|||
|
Т а к и м образом, модель пленки |
в значительной степе |
|||||||||
ни |
упростилась. |
Эквивалентная |
схема |
приобрела |
вид |
||||||
схемы |
трансформатора |
(рис. 1.7, б), величина |
взаимоин |
||||||||
дукции Мя которого зависит от амплитуды и направле ния управляющего поля (см. § 1.6).
Теоретические |
и |
экспериментальные |
зависимости |
|
взаимоиндукции |
М д от составляющих |
управляющего по |
||
л я /гл и /гт приведены |
на рис. 1.8, в и |
рис. |
1.20 соответ |
|
ственно. |
|
|
|
|
72
Считая, что ко входу |
обмотки |
1 подключен генератор |
||||||||||||
тока, |
получим |
|
схему |
модулятора, |
приведенную |
на |
||||||||
рис. |
2.3. Д и ф ф е р е н ц и а л ь н о е |
|
уравнение, соответствующее |
|||||||||||
этой |
схеме, |
имеет |
вид |
[18] |
|
|
|
|
|
|||||
|
|
|
d * u |
+ |
_ L £ L |
+ |
^ |
(L + |
I |
и + |
|
|||
|
|
|
dt2 |
"г" |
RC |
|
dt |
|
LrS)C |
|
||||
|
= |
± |
{ Ш |
|
Я |
% |
+ |
|
lak |
|
|
, |
(2.1) |
|
где |
Мл = |
/ |
(Лл , |
|
Лт ) = |
/г/м . ,1 д т ; 1 т В = |
<р (/гл , Ат ) = |
отт£дт. |
||||||
|
|
|
|
|
Р и с . |
2.3 |
|
|
|
|
|
|
||
Уравнение |
(2.1) |
есть |
не |
что |
иное, |
к а к |
преобразование |
|||||||
системы |
уравнений, о т р а ж а ю щ и х |
свойства пленки (1.21), |
||||||||||||
и уравнения нагрузки. Коэффициенты уравнения |
(2.1) |
|||||||||||||
являются |
функциями, зависящими |
от |
времени, |
т а к |
к а к |
|||||||||
|
|
Ат |
= /1Т(Ш) |
+ /, |
(С |
J ^ |
- |
+ |
|
, |
|
(2.2) |
||
где Q и v обозначают |
частоты |
модуляции и заполнения |
||||||||||||
соответственно. П р и этом величины |
А л |
(т) и /гт (т) |
яв |
|||||||||||
ляются |
некоторыми |
функциями |
|
медленного |
времени |
|||||||||
т = Qt, изменяющимися медленно |
по сравнению с «есте |
|||||||||||||
ственной |
|
единицей |
времени» — порядка |
периода |
соб |
|||||||||
ственных колебаний исследуемой системы. |
|
|
||||||||||||
Н а й д е м |
зависимости Мя |
и L T a |
от |
внешних полей. И з |
||||||||||
в ы р а ж е н и я |
(1.37) |
имеем |
|
|
|
|
|
|
|
|
|
|||
Z T 2 = |
|
L r K (1 - |
Ф2)/[1 - |
2Ф2 ± |
Ал (1 - |
Ф*)Ч* + |
ФАТ ]. |
|||||||
Величину |
|
Ф |
можно аппроксимировать |
соотношением |
|
|||||||||
|
|
|
|
Ф ^ А т / ( 1 |
+ Ал ). |
|
|
|
(2.3) |
|||||
73
О т к у д а |
с |
учетом |
(2.3) получим |
|
|
|
|
|
|
||||||
|
|
|
i |
T S |
S |
i r a (1 ± |
/ У / [(1 ± |
Л,,)2 + |
hl\. |
|
|
(2.4) |
|||
П р и |
/гт |
^ |
0,7 |
максимальная |
погрешность |
(2.4) |
не |
превы |
|||||||
шает |
14%. |
|
|
|
|
|
|
|
|
|
|
|
|
||
Аналогично, |
подставляя |
(2.3) |
в |
(1.35), получаем |
вы |
||||||||||
р а ж е н и е |
д л я |
взаимоиндукции: |
|
|
|
|
|
|
|||||||
|
|
|
|
Мл |
= kLwfiT/[tt±W |
|
|
+ |
|
|
|
(2-5) |
|||
М а к с и м а л ь н а я |
погрешность |
аппроксимации |
Мя |
при |
|||||||||||
достижении |
/гт |
ж 0,7 не |
превышает |
28%. |
Более |
точная |
|||||||||
аппроксимация |
величины |
М д , |
не п р е в ы ш а ю щ а я |
10% |
при |
||||||||||
тех ж е условиях, |
приводит |
к |
более |
сложной зависимости |
|||||||||||
|
Ж |
д |
= |
k L r |
K |
<1+Ал )» + |
А ? - [ а А ? / ( 1 + А Ж " ' |
|
|
|
|||||
которая не представляет практического интереса при ре
шении рассматриваемой задачи . |
Необходимо |
отметить, |
||||
что |
погрешности |
аппроксимации |
усредненных |
значений |
||
L T S |
и М д будут |
меньше. |
|
|
|
|
Решение уравнения |
(2.1) с учетом соотношений |
(2.2),. |
||||
(2.4) |
и (2.5) — задача |
чрезвычайно трудная д а ж е |
с ис |
|||
пользованием асимптотических методов, поэтому ограни чимся случаем малого сигнала, т. е. будем считать, что в в ы р а ж е н и и (2.2) вторые слагаемые намного меньше пер
вых. С учетом этого |
условия параметры уравнения |
(2.1) |
я в л я ю т с я функциями |
медленного времени. Откуда |
члены |
спроизводными индуктивных параметров по времени
dMJdt и dLTJdt могут быть опущены на основании вы полнения следующих неравенств:
dt |
I " д д N X |
dLxji dt
dt
Тогда, если выбрать высокочастотное воздействие в виде
ij,(vt) |
= |
Ivcosvt, |
|
уравнение |
(2.1) |
можно |
записать |
т а к : |
||
|
|
+8 |
т |
+0)2 ( т ) и |
=0)2 |
М е |
<т)sin ^' <2-6> |
|||
г д е |
8 = |
\ЩС |
— затухание; |
ш (т) — резонансная |
частота |
|||||
контура; |
е (i) |
= |
1^МЛ |
— амплитуда |
входного |
воздей |
||||
ствия; т = Ш — медленное |
безразмерное |
время. |
|
|||||||
74
В приложении |
2 |
показано, |
|
что |
резонансная |
частота |
|||||||||||
и амплитуда |
входного |
воздействия |
|
для реальных |
пара |
||||||||||||
метров модулятора |
могут быть |
представлены |
в |
виде |
|||||||||||||
|
|
й ) ( ' с ) . = ш |
о ( 1 |
+ |
/?cosx), |
|
|
|
|
(2.7) |
|||||||
е (О = |
<?о + |
e |
i |
c |
o |
s |
г |
+ £ 2 c |
° s 2т -|- |
. . ., |
|
(2.8) |
|||||
а т а к ж е вычислены коэффициенты |
р<С1, fin, еи |
е 2 и т. д. |
|||||||||||||||
Таким образом, уравнение |
выходного |
|
контура |
модулято |
|||||||||||||
ра сведено к линейному уравнению с переменными |
коэф |
||||||||||||||||
фициентами. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение |
уравнения |
(2.6) |
ищем |
в |
первом |
приближе |
|||||||||||
нии в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
(*,т) = |
|
а (х) cos [v^ -f- б (х)] |
|
|
|
(2.9) |
|||||||||
асимптотическим |
методом |
[27], |
где |
а |
и б должны |
быть |
|||||||||||
определены |
из системы |
уравнений |
|
|
|
|
|
|
|
||||||||
|
|
|
2 |
|
|
£ 0 ( T ) |
+ |
V |
|
|
|
|
|
(2.10) |
|||
—г- = |
ш (х) — v -\ |
|
|
v |
; ,v |
' |
sm 8. |
|
|
|
|
||||||
В правые |
части |
укороченных |
уравнений |
входит мед |
|||||||||||||
ленное время. В первом |
|
уравнении |
опущен |
член |
|
|
|||||||||||
|
~ |
[ст (-с)] = |
сщр |
|
cos |
х, |
|
|
|
|
|||||||
так как ш0ср < 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Переходя |
в |
уравнениях |
|
(2.10) |
к |
дифференцирова |
|||||||||||
нию по медленному времени и учитывая малость измене ния частоты, получаем
а = — Ы — Е (т) cos 0, |
6 = |
Д + pcosx + - - ^ - s i n 0 . (2.11) |
|
||||||
З д е с ь точка означает дифференцирование |
по медленному |
|
|||||||
времени |
х; |
Д = (ш0 — v)/Q — относительная |
расстройка; |
|
|||||
£ = 8/2Q — относительное |
затухание; р = (ш0 /й) р — относи |
|
|||||||
тельная девиация резонансной |
частоты; £"(х)^;(ш0 /22) е (х), |
|
|||||||
так как |
ш2 |
(х)/[ш (х) - j - v] ^ |
со0/2. |
|
|
|
|||
Система |
уравнений |
(2.11) |
становится |
линейной, если |
|
||||
перейти |
к |
переменным |
|
|
|
|
|
|
|
|
|
U |
= |
a |
cos б, |
| |
|
|
|
|
|
1/ |
= |
a |
- я |
j |
( 2 - 1 2 |
) |
|
|
|
К |
sin 9. |
' |
|
||||
75
Т о г д а для |
новых переменных U н V получаем систему |
||
уравнении |
|
|
|
|
О = - W - Д ( т ) К - £ • ( * ) , |
| |
|
|
|
|
(2.13) |
|
V |
= —W + &(x)U, |
) • |
г д е А (т) = |
Л + |
р с о э т . |
|
Из этих уравнений легко получить линейные диффе ренциальные уравнения с переменными коэффициентами относительно каждой из переменных U и V:
|
U + 2Ш |
+ [S2 + |
Л'2 (x)J U '=» |
|
* |
= 4 ^ г ^ + Ш ) |
~ Е w - ^ w + |
£ <т>- |
(2.14) |
||
|
|
Д 2 (t)] V |
= |
|
|
У- + |
+ [Е2 + |
|
|
||
О д н а к о |
и эти уравнения |
трудны для |
анализа, поскольку |
||
их необходимо решать в высших приближениях для по лучения второй и последующих гармоник частоты Q.
Обратимся теперь к реальным п а р а м е т р а м |
модулято |
||||||||||||
ра . Отношение |
р / | = 2Qp |
<с 1, |
так |
как |
добротность |
вы |
|||||||
ходного |
контура низкая. Будем считать |
т а к ж е , что |
кон |
||||||||||
тур |
настроен |
в резонанс |
с |
внешней |
частотой. |
Тогда |
|||||||
Д(т) |
<С I , и из |
уравнений |
(2.14) |
видно, |
что |
| V(T) | <С |
|||||||
<С | U(x) |
|, так как внешние воздействия |
в правых |
частях |
||||||||||
(2.14) |
пропорциональны |
£ |
и |
Д ( т ) . |
|
Следовательно, |
|||||||
j V(T)IU(X) |
I = t g 0 < C 1 и |
|
в первом |
уравнении |
(2.11) |
||||||||
можно |
приблизительно |
считать |
c o s 9 ^ 1 . |
Тогда |
первое |
||||||||
уравнение превращается в обыкновенное линейное диф
ференциальное |
уравнение |
первого порядка: |
|||
|
а = |
-Ы |
+ Е{%). |
(2.15) |
|
Его решение в установившемся режиме |
легко находится |
||||
(приложение 3) |
^ з а п и с ы в а е т с я |
в виде |
|
||
|
Q |
£ |
|
|
X |
|
X cos (пх |
+ |
arctg- |
(2.16) |
|
.76
С учетом (П3.4) и (П3.5) имеем
а = Q Г е0 + el — - = L = = c o s (% + arctg - у - ) +
+ *2 |
- cos (2* + arctg - у ) -f- ... |
(2-17) |
Т а к ^ к а к е2/е1<^\, |
можно ограничиться первыми |
двумя |
членами, тогда, используя соотношения (П2.4 и П2.5), получаем
|
|
|
a^Qe |
1 — '"7 |
|
|
|
|
||
|
|
|
|
(1 — /н 2 ) 3 ' 2 |
|
|
|
|||
|
(1-1И«)3 '2 |
| Л + 1 Г |
cos^t |
+ a r c t g - у - j |
, |
(2.18) |
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
г д е |
|
|
|
|
|
А д |
cos р |
|
|
|
|
|
/„Шл |
= / e / v v Z T K |
|
|
|
||||
|
|
(1 + A 2 o s i n p ) 2 |
|
|
|
|||||
|
|
|
|
Л 2 sin р |
|
|
|
|
|
|
|
in = 7 - (1 + A 2 o S i n Р) 1 |
1 Т = -Лоо ' ' |
|
|
|
|||||
Лs0 — постоянная |
составляющая |
относительного |
управляю |
|||||||
щего |
поля |
/гу ; |
Л а ш |
— амплитудное |
значение |
переменной |
||||
составляющей относительного |
|
управляющего |
поля |
hyi |
||||||
D |
1 I Y 1 + |
(1/£2 ) — коэффициент демодуляции, |
показы |
|||||||
вающий, во сколько раз коэффициент модуляции |
выход |
|||||||||
ного |
напряжения |
меньше ех. |
|
|
|
|
|
|
||
'Легко видеть, что этот коэффициент представляет
собой ветвь резонансной кривой контура, так как
1/£ = 22/8 = Q22/co0 = Q2Aco/u)0,
где частота модуляции 2 равна разности между несущей частотой со0 несоответствующей боковой частотой ш.
Коэффициент модуляции определяется следующим отношением:
М |
= ft - |
2щ)/(1 + Vn)V |
1 |
+ |
|
|
|
Например, |
для |
7 = 0,95, / г 2 о |
= 1 , |
р = |
30° и |
D=\ |
|
величина коэффициента |
модуляции |
равна М = |
0,434. |
||||
На рис. 2А,а |
показана |
экспериментальная |
осциллограмма |
||||
77