

Раздел 3 преобразования при изменении базиса
§ 1. Основные понятия и теоремы
Пусть в линейном пространстве Vзадан базис
![]() ,
и другой базис
,
и другой базис
![]() .
Разложим векторыfkв базисе
.
Разложим векторыfkв базисе
![]() :
:

Если координаты векторов fk нового базиса в старом базисе
![]() записать в столбцы некоторой матрицы,
то получим матрицу линейного оператораР, который переводит векторыеiв векторыfi соответственно.
Этот операторназывается оператором
переходаот базиса {еi}
к базису {fi}, а его матрицаназывается матрицей переходаи
обозначаетсяРе
f.
записать в столбцы некоторой матрицы,
то получим матрицу линейного оператораР, который переводит векторыеiв векторыfi соответственно.
Этот операторназывается оператором
переходаот базиса {еi}
к базису {fi}, а его матрицаназывается матрицей переходаи
обозначаетсяРе
f.
При переходе от базиса {еi} к базису {fi} различные объекты, заданные в линейном пространстве преобразуются по разному:
а) базисные векторы:
![]() ;
;
б) векторы
![]() ;
;
в) матрицы линейных операторов:
![]() ;
;
г) коэффициенты линейных форм:
![]() ;
;
д) матрицы билинейных форм:
![]() ,
,
и, кроме того, при последовательных преобразованиях: Tе g =Ре f .Gf g.
§2. Контрольные вопросы и задания
Как изменятся координаты вектора, если: а) один из базисных векторов умножить на 0; б) переставить местами два базисных вектора?
Как изменятся коэффициенты линейной формы, если: а) один из базисных векторов умножить на 0; б) переставить местами два базисных вектора?
Как изменится матрица линейного оператора, если: а) один из базисных векторов умножить на 0; б) переставить местами два базисных вектора?
Как изменится матрица билинейной формы, если: а) один из базисных векторов умножить на 0; б) переставить местами два базисных вектора?
Сохраняется ли свойство положительной определенности квадратичной формы при переходе от одного базиса к другому?
§3. Примеры решения задач
Задача 1. Пустьi,j– координатные векторы прямоугольной системы координат на плоскости. Найти разложение вектораx=i+jпо базису {e1,e2}, еслиe1= 7i+ 4j,e2= 5i+ 3j.
Решение.
По определению, матрица перехода от
базиса {i,j} к базису {e1,e2} есть матрица
![]() .
Вычислим обратную матрицу:
.
Вычислим обратную матрицу:
![]() .
Векторхв базисе {i,j} имеет вид:х = (1, 1). По формулеxf=P–1xe,
находим столбецхе координат векторахв базисе {e1,e2}:
.
Векторхв базисе {i,j} имеет вид:х = (1, 1). По формулеxf=P–1xe,
находим столбецхе координат векторахв базисе {e1,e2}:
![]() .
.
Следовательно, х= –2е1+ 3е2.
Задача 2. В пространствеV2даны три базиса: {e1,e2}, {f1,f2} и {g1,g2} причемf1=e1–e2,f2=e1+e2;g1= 3e1+e2,g2= 5e1+e2. Найти матрицу перехода от базиса {f1,f2} к базису {g1,g2}.
Решение.
По определению матрица перехода от
базиса {e1,e2} к базису
{f1,f2} есть матрица
![]() ,
а матрица перехода от базиса {e1,e2} к базису {g1,g2}
есть матрица
,
а матрица перехода от базиса {e1,e2} к базису {g1,g2}
есть матрица
![]() .
Тогдаfi
= Pefei,
gi
= Pegei.Из первого равенства находим
.
Тогдаfi
= Pefei,
gi
= Pegei.Из первого равенства находим
![]() .
Подставляя во второе равенство, получаем
.
Подставляя во второе равенство, получаем
![]() .
.
Таким образом, матрицей перехода от
базиса {f1,f2} к базису
{g1,g2} является матрица
![]() .
Вычисляем матрицу
.
Вычисляем матрицу
![]() :
:
![]() ,
а затем находим произведение
,
а затем находим произведение
![]() :
:
![]() .
.
Задача 3.Пустьi,j– координатные векторы прямоугольной системы координат на плоскости. Найти матрицу перехода от базиса {i,j} к базису {i,j}, повернутому на уголпо отношению к базису {i, j} и матрицу обратного перехода.
Решение. Из рис.1 ясно, что координаты векторовi,jв базисе {i,j} имеют видi= {cos, sin},j= {–sin, cos}. Пользуясь определением, составляем матрицу переходаА() переходя от базиса {i,j} к базису {i,j}:
![]() .
(1)
.
(1)
В
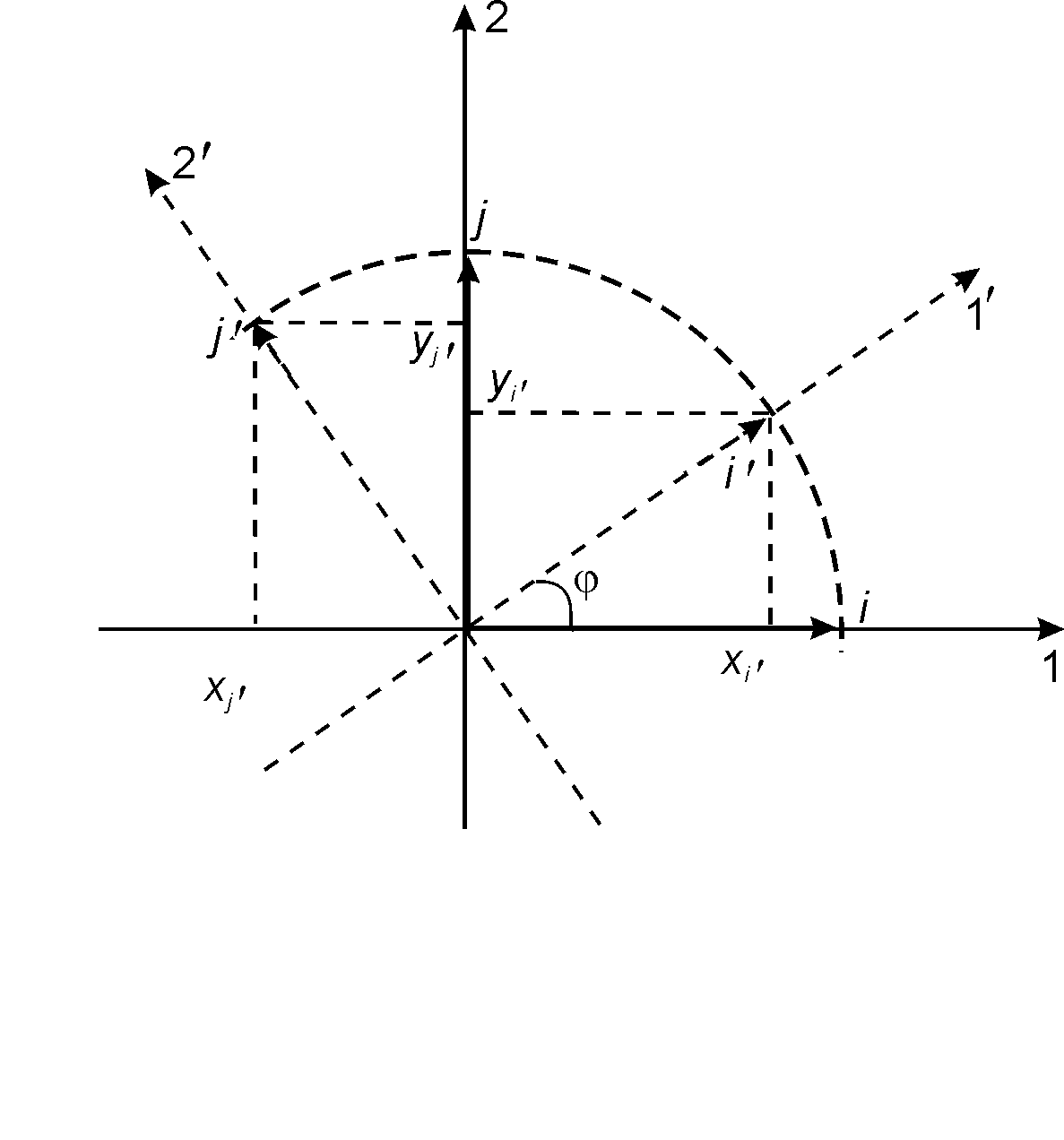
Рис.1.
Поворот прямоугольной системы координат
на угол против
часовой стрелки.![]() .
Отметим, что обратный переход от базиса
{i,j}
к базису {i,j} есть поворот базиса
на угол (–), и
поэтому матрицу этого перехода можно
найти по формуле (1), заменивна (–):
.
Отметим, что обратный переход от базиса
{i,j}
к базису {i,j} есть поворот базиса
на угол (–), и
поэтому матрицу этого перехода можно
найти по формуле (1), заменивна (–):
А–1()
=А() =![]() .
.
Задача 4. Билинейная форма(x,y) в базисе {e1,e2,e3} имеет вид(x,y) = –2х1у1+ 3х1у2+х1у3+ 5х2у1+х2у3–х3у2. Найти выражение этой билинейной формы через координаты элементов в базисе {f1,f2,f3}, еслиf1 =e2,f2= –e1,f3 =e2+e3.
Решение.
Составим матрицуРперехода от
базиса {e1,e2,e3}
к базису {f1,f2,f3}
(со столбцами из координат элементовf1,f2,f3 в
базисе
![]() ):
):
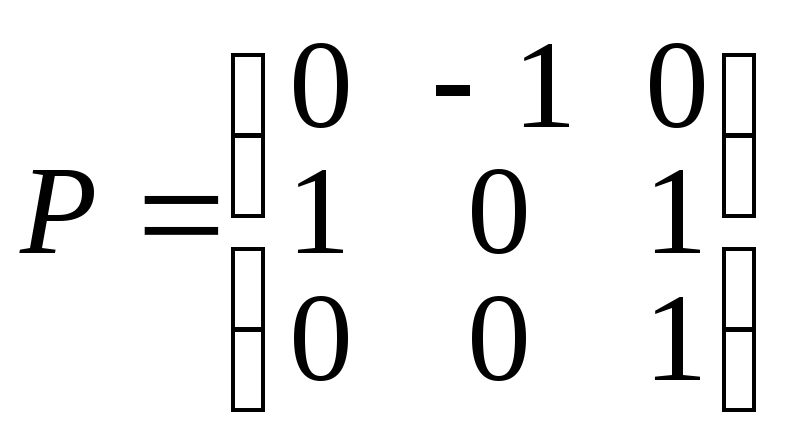 ,
,
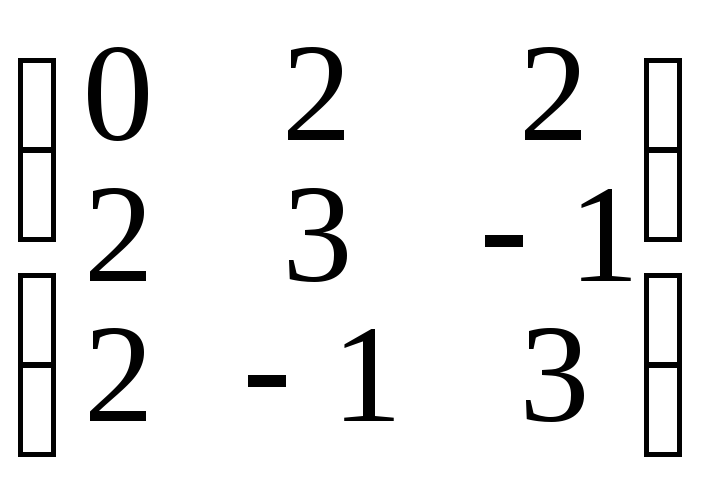
и воспользуемся формулой Bf=PTBePпреобразования матрицы билинейной формы при изменении базиса, гдеВe иВf– матрицы билинейной формы(x,y) в базисах {e1,e2,e3} и {f1,f2,f3}.
Составим матрицу Вe:
 .
Далее вычисляем:
.
Далее вычисляем:
 .
.
отсюда получаем следующий вид билинейной формы в базисе {f1,f2,f3}:
(x,y) = –512+12– 321– 222– 423–31– 532,
где
![]() .
.
Задача 5. Привести уравнение кривой второго порядка
11x2– 20xy– 4y2– 20x– 8y+ 1 = 0 к каноническому виду с помощью поворота осей координат системыOxyи последующего параллельного переноса.
Решение.
Приведем квадратичную форму 11x2– 20xy– 4y2, связанную с
заданным уравнением, ортогональным
преобразованием к каноническому виду.
С этой целью составим матрицу квадратичной
формы:
![]() ,
и запишем характеристическое уравнение:
,
и запишем характеристическое уравнение:
![]() .
.
Оно имеет корни 1= –9,2= 16. Далее
находим взаимно ортогональные
нормированные собственные векторы
(столбцы)F1иF2матрицыА: если1= –9, то
![]() ;
если2= 16, то
;
если2= 16, то
![]() .
.
Следовательно, искомое ортогональное
преобразование имеет матрицу
![]() ,
у которой detP= 1. Равенство единице
определителя ортогонального преобразования
обозначает, что происходит поворот
системы координат без отражения
относительно одной из осей, т.е. без
изменения ориентации системы координат.
МатрицаРявляется матрицей оператора
поворота на уголтакой, что
,
у которой detP= 1. Равенство единице
определителя ортогонального преобразования
обозначает, что происходит поворот
системы координат без отражения
относительно одной из осей, т.е. без
изменения ориентации системы координат.
МатрицаРявляется матрицей оператора
поворота на уголтакой, что
![]() .
Повернув оси координат системыОхуна угол
.
Повернув оси координат системыОхуна угол
![]() (против часовой стрелки), получим
прямоугольную системуОху.
При этом координаты точек преобразуются
по формуле
(против часовой стрелки), получим
прямоугольную системуОху.
При этом координаты точек преобразуются
по формуле
![]() или
или
![]() .
.
При таком ортогональном преобразовании квадратичная форма переходит в форму: 1(x )2+2(y )2= –9(x )2+ 16(y )2. Запишем в новых координатах линейные члены заданного уравнения:
![]() .
.
В системе координат Охууравнение кривой принимает вид:
![]() .
.
Выделяя полные квадраты по обеим переменным, получаем:
![]() .
.
Полагая
![]() ,
т.е. производя параллельный перенос
осей координат так, что начало координат,
переходит в точку
,
т.е. производя параллельный перенос
осей координат так, что начало координат,
переходит в точку
![]() ,
приходим к каноническому уравнению
данной кривой
,
приходим к каноническому уравнению
данной кривой
![]() .
.
Это – каноническое уравнение гиперболы в системе координат Оху.
Задача
6. С помощью поворота осей координат
и последующего параллельного переноса
привести уравнение кривой второго
порядка 4x2– 4xy+y2– 2![]() x– 3
x– 3![]() y+
y+
![]() = 0 к каноническому виду.
= 0 к каноническому виду.
Решение.
Составляем матрицу квадратичной
формы, связанной с заданным уравнением:
![]() ,
и решаем характеристическое уравнение
,
и решаем характеристическое уравнение
![]() .
.
Оно имеет корни 1= 0,2= 5. Находим взаимно ортогональные нормированные собственные векторы матрицыА:
![]() ,
,
![]() .
.
Они являются столбцами матрицы Рортогонального преобразования, приводящего квадратичную форму к каноническому виду:
![]() .
.
Следовательно, преобразование (как и в
предыдущем примере) это поворот на угол
![]() и координаты точек преобразуются по
формулам:
и координаты точек преобразуются по
формулам:
![]() .
Пользуясь этими формулами, запишем
линейные члены заданного уравнения в
координатахх,у:
.
Пользуясь этими формулами, запишем
линейные члены заданного уравнения в
координатахх,у:
![]() .
.
Итак,
уравнение данной кривой в системе
координат Оху
полученной из системыОхуповоротом
осей на угол
![]() ,
имеет вид:
,
имеет вид:
![]() .
.
В результате выделения полного квадрата
по переменной у
получаем уравнение
![]() .
.
Положим х=х+ 1,у=у+ 0,7, т.е. произведем параллельный перенос осей координат системыОху так, что начало координат перейдет в точкуО (–1; –0,7). В системе координатОху уравнение кривой имеет канонический вид: (у )2= –0,8х. Это – каноническое уравнение параболы.
Задача
7. Перейти к такой прямоугольной
системе координат, в которой уравнение
поверхности 3y2+ 3z2 +
4xy+ 4xz– 2yz – 12![]() x– 14
x– 14![]() y+ + 2
y+ + 2![]() z+ 506 = 0 имеет канонический вид, и определить
тип поверхности.
z+ 506 = 0 имеет канонический вид, и определить
тип поверхности.
Решение.
Квадратичная форма 3y2+
3z2 + 4xy+ 4xz– 2yz,
связанная с заданным уравнением, имеет
матрицу
 .
Собственные значения этой матрицы есть1= –2,2,3= 4, а столбцы (векторы)
.
Собственные значения этой матрицы есть1= –2,2,3= 4, а столбцы (векторы)
 ,
,
 ,
,

являются
попарно ортогональными нормированными
ее собственными векторами. Определитель
матрицы, составленной из этих столбцов,
равен –1. Это означает, что ортогональное
преобразование является поворотом с
отражением относительно одной из
координатных плоскостей. Во избежание
этого поменяем местами, первый и второй
столбцы в матрице (f1 f2
f3), получим ортогональную
матрицу:
 ,
,
определитель которой равен единице, т.е. преобразование не будет производить отражения.
Ортогональное
преобразование переменных
 приводит квадратичную форму к следующему
каноническому виду:
приводит квадратичную форму к следующему
каноническому виду:
4(х )2– 2(y )2+ 4(z )2.
С помощью формулы для ортогонального преобразования переменных вычислим в новых координатах линейные члены заданного уравнения:
![]() .
.
Итак, в системе координат Охуzс координатными векторамиi,j,kуравнение поверхности имеет вид:
![]() .
.
Выделив полные квадраты по переменным
х иу, получим
уравнение
![]() .
Положим
.
Положим
![]() ,
,
![]() ,
,
![]() ,
т.е. произведем параллельный перенос
осей координат системыОхуzтак, что начало координат перейдет в
точку
,
т.е. произведем параллельный перенос
осей координат системыОхуzтак, что начало координат перейдет в
точку
![]() .
В новой системе координатОхуzуравнение поверхности имеет канонический
вид:
.
В новой системе координатОхуzуравнение поверхности имеет канонический
вид:
![]() .
Это – уравнение однополостного
гиперболоида.
.
Это – уравнение однополостного
гиперболоида.