

5. АНАЛИЗ СИСТЕМ УПРАВЛЕНИЯ ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ. МЕТОД СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
5.1. Основные характеристики случайных процессов
На практике часто встречаются воздействия, закон изменения которых носит случайный характер и не может быть заранее точно определен. Такими случайными воздействиями являются, например, суточные изменения нагрузок энергосистемы; порывы ветра, действующие на самолет; удары волн в гидродинамических системах; сигналы радиолокационных установок, отраженные от цели; флуктуационные шумы в радиотехнических устройствах и т. д.
Исследование системы при наличии случайных воздействий в принципе можно проводить обычными методами, рассмотренными выше, обеспечивая, например, заданную точность системы при самом неблагоприятном (максимальном) значении случайного возмущения. Однако, поскольку максимальное значение случайной величины наблюдается редко, в этом случае к системе будут предъявляться заведомо более жесткие требования, чем это вызвано сутью дела. Поэтому, хотя подобный метод иногда оказывается весьма целесообразным или даже единственно приемлемым, в подавляющем большинстве случаев расчет системы при случайных воздействиях ведут не по максимальному, а по наиболее вероятному значению случайной величины.
Функцию, значение которой при каждом значении независимой переменной является случайной величиной, называют случайной
функцией. Случайные функции |
X (t) , для которых независимой |
|
переменной является время |
t , называют случайными процессами или |
|
стохастическими процессами. |
|
|
Случайный процесс |
X (t) |
не есть определенная кривая, он |
является множеством определенных кривых
xi
(t)
, где
i =1, 2, , n ,
получаемых в результате отдельных опытов. Каждую кривую этого множества называют реализацией случайного процесса. Сказать заранее, по какой из реализаций пойдет процесс, невозможно.
Как известно, статистические свойства случайной величины x определяют по ее функции распределения (интегральному закону распределения) F (x) или плотности вероятности
107
(дифференциальному закону распределения)
w( x)
.
Случайные величины могут иметь различные законы распределения: равномерный, нормальный, экспоненциальный и др. Во многих задачах автоматического управления очень часто приходится иметь дело с нормальным законом распределения (или законом Гаусса), который получается, если случайная величина определяется суммарным эффектом от действия большого числа различных независимых факторов.
Аналитическое выражение функции распределения в этом случае
|
|
1 |
|
x |
−( x −mx ) 2 / 2σ 2x dx . |
F (x) = |
|
|
e |
||
|
|
|
|||
|
|||||
|
|
2π |
|
||
|
|
|
|
− |
|
Аналитическое выражение плотности вероятности для нормального закона распределения
где
mx
w(x) = |
dF (x) |
= |
1 |
e |
|
dx |
2π |
||||
|
|
|
– математическое ожидание;
−( x
σx
−
m ) |
2 |
/ 2σ |
2 |
|
|
|
, |
||
x |
|
|
x |
|
|
|
|
– среднее квадратическое
отклонение.
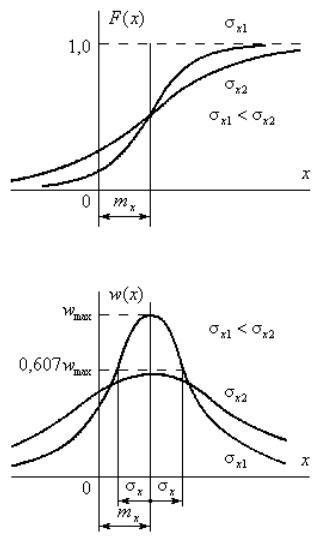
Типичные графики функций распределения F (x) и плотности
вероятности |
w( x |
а, б.
Изменение
) |
для различных значений |
σ x |
приведены на рис. 5.1, |
среднего значения mx вызывает только смещение
кривых |
F (x) |
и w( x) |
изменение величины
вдоль оси абсцисс без изменения их формы, а
σ x |
вызывает изменение масштаба вдоль обеих |
координатных осей, причем площадь, ограничиваемая кривой
w( x)
и
осью абсцисс, всегда остается конечной и равной единице, т. е.
w(x)dx = F (x) |− = 1, поскольку
−
F ( )
=
1
, a
F (−)
=
0
.
При конечных пределах интегрирования величина интеграла, определяемого последним соотношением, будет меньше единицы. Однако уже при пределах интегрирования от mx − 3σx до mx + 3σx
величина интеграла равна 0,997. Так как |
вероятность того, что х |
лежит в данном интервале, равна 0,997, |
то величину 3σx часто |
используют в практических расчетах в качестве верхней границы отклонения от среднего значения.
108
а
б
Рис. 5.1
Для случайного распределения F (x, t)
процесса также вводят понятие
и плотности вероятности |
w(x, t) |
функции , которые
зависят от |
фиксированного момента времени наблюдения t и от |
|
некоторого выбранного уровня |
x , т. е. являются функциями двух |
|
переменных |
x и t . |
|
Понятие о функции распределения и плотности вероятности случайного процесса обычно используют при теоретических построениях и определениях. В практике исследования автоматических систем управления широкое распространение получили сравнительно более простые, хотя и менее полные характеристики случайных процессов, аналогичные числовым
характеристикам |
случайных |
величин. |
Примерами |
таких |
|
|
|
|
109 |
характеристик служат рассматриваемые ниже: математическое ожидание, дисперсия, среднее значение квадрата случайного процесса, корреляционная функция, спектральная плотность и другие.
Математическим ожиданием (средним значением)
случайного процесса
X (t)
называют величину
m |
(t) = M [ X (t)] = |
x |
|
|
1 |
|
|
|
|
|
xw |
(x, |
− |
|
|
t)dx
,
где |
w1(x, t) |
– одномерная плотность вероятности случайного |
|
процесса X (t). |
|
||
|
Математическое ожидание случайного процесса |
X (t) |
|
представляет собой некоторую неслучайную (регулярную) функцию времени mx (t) , около которой группируются и относительно которой
колеблются все реализации данного случайного процесса. Математическое ожидание называют средним значением
случайного процесса по множеству (средним по ансамблю,
статистическим средним), поскольку оно представляет собой вероятностно усредненное значение бесконечного множества реализаций случайного процесса.
Средним значением квадрата случайного процесса называют величину
|
|
2 |
|
|
2 |
|
|
|
2 |
|
|
|
x |
(t) = M [ X |
(t)] = |
|
x |
1 |
|
||||
|
|
|
|
|
|||||||
|
|
|
|
|
w (x, t)dx |
|
|||||
|
|
|
|
|
|
|
− |
|
|
|
|
|
Иногда вводят в рассмотрение так называемый центрированный |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
случайный процесс |
|
X (t), |
под которым понимают отклонение |
||||||||
случайного процесса |
X (t) от его среднего значения mx (t) , или |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X (t) = X (t) − mx (t) . |
|
|||||||
|
Тогда случайный процесс |
|
X (t) можно рассматривать как сумму |
||||||||
двух |
составляющих: |
регулярной |
|
|
составляющей, |
равной |
|||||
математическому ожиданию |
mx (t) , |
и |
центрированной |
случайной |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
составляющей X (t), т. е.
X (t) = mx (t) + X (t) .
Очевидно, что математическое ожидание центрированного случайного процесса равно нулю:
110

M[ X (t)] =
M[ X (t) − m |
(t)] = m |
(t) − m |
(t) |
x |
x |
x |
|
=
0
.
Для того чтобы каким-то образом учесть степень разбросанности реализаций случайного процесса относительно его среднего значения, вводят понятие дисперсии случайного процесса, которая равна математическому ожиданию квадрата центрированного случайного процесса:
|
|
|
|
|
|
|
|
Dx (t) = M [ X 2 (t)] = {x − mx (t)}2 w1(x, t)dx . |
|||
|
|
|
− |
Дисперсия |
случайного |
процесса является неслучайной |
|
(регулярной) функцией времени |
Dx (t) , значение которой в каждый |
||
момент времени |
tk |
равно дисперсии соответствующего сечения |
|
X (tk ) случайного процесса.
Легко показать, что математическое ожидание
mx
(t)
, дисперсия
D |
(t) |
x |
|
и среднее значение квадрата
x |
2 |
(t) |
|
случайного процесса,
имеющие размерность квадрата случайной величины, связаны соотношением
x 2 (t) = Dx (t) + mx2 (t) .
На практике часто бывает удобно пользоваться статистическими характеристиками случайного процесса, имеющими ту же размерность, что и сама случайная величина. К таким характеристикам относят:
среднее квадратическое значение случайного процесса
x |
(t) = |
x |
2 |
(t) |
|
||||
с.к |
|
|
|
|
=D (t) + m2 (t)
xx
,
равное арифметическому значению квадратного корня из среднего значения квадрата случайного процесса;
среднее квадратическое отклонение случайного процесса
σ x (t) = 
 Dx (t) ,
Dx (t) ,
равное арифметическому значению квадратного корня из дисперсии случайного процесса.
Из последних соотношений видно, что среднее квадратическое значение xс.к (t) и среднее квадратическое отклонение σx (t)
случайного процесса в общем случае не совпадают.
Математическое ожидание и дисперсия являются важными характеристиками случайного процесса, но они не дают достаточного представления о том, какой характер будут иметь отдельные
111
реализации случайного процесса.
Корреляционной функцией случайного процесса
X (t)
называют
неслучайную функцию двух
каждой пары произвольно (моментов времени) t1 и t2
аргументов |
Rx (t1, t2 ) , которая для |
выбранных значений аргументов равна математическому ожиданию
произведения двух случайных величин соответствующих сечений случайного процесса:
X |
1 |
(t) |
|
|
и
X |
2 |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
x |
(t |
, t |
2 |
) = M [ X (t |
) X (t |
2 |
)] = |
|
|
x x |
w |
(x |
, t |
; |
|
|
1 |
|
1 |
|
|
1 |
2 |
2 |
1 |
1 |
|
|||||
|
|
|
|
|
|
|
|
|
− − |
|
|
|
|
|
||
x |
2 |
, |
|
|
t |
2 |
)dx dx |
|
|
1 |
2 |
|
,
где |
w2 ( x1, t1; x2 , t2 ) |
– двумерная плотность вероятности. |
Часто пользуются иным выражением корреляционной функции,
записанной не |
для самого случайного |
процесса |
X (t) , а для |
|
|
|
|
центрированной |
случайной составляющей |
X (t). Корреляционную |
|
функцию в этом случае называют центрированной и определяют из
соотношения |
|
|
|
|
|
|
|
|
|
|
R (t |
|
|
|
|
|
|
||
|
, t |
2 |
) = M [ X |
1 |
(t) X |
2 |
(t)] = |
||
|
x 1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
= |
{x1 − mx (t1)}{x2 − mx (t2 )}w(x1, t1; x2 , t2 )dx1dx2 . |
||||||||
− − |
|
|
|
|
|
|
|
|
|
Различные случайные |
|
процессы |
в |
зависимости от того, как |
|||||
изменяются их статистические характеристики с течением времени,
делят на стационарные и нестационарные. Различают стационарность в узком смысле и стационарность в широком смысле.
Стационарным в узком смысле называют случайный процесс
X (t), если его |
n -мерные функции распределения и плотность |
вероятности при любом n не зависят от положения начала отсчета времени t. Стационарный случайный процесс – это своего рода аналог установившегося процесса в детерминированных системах.
Стационарным в широком смысле называют случайный процесс
X (t), математическое ожидание которого постоянно:
M[ X (t)] = mx = const ,
а корреляционная функция зависит только от одной переменной – разности аргументов τ = t2 −t1 :
|
|
R(τ) = Rx (t1, t2 ) = M [ X (t1) X (t2 )] = |
x1x2w2 (x1, x2 , τ)dx1dx2 |
− −
112
Для случайного процесса с нормальным законом распределения математическое ожидание и корреляционная функция полностью
определяют его |
n -мерную плотность вероятности. Поэтому для |
нормальных случайных процессов понятия стационарности в широком и узком смысле совпадают.
Корреляционная функция есть четная функция, т. е.
Rx (τ) = Rx (−τ) .
При исследовании автоматических систем управления удобно пользоваться еще одной характеристикой стационарного случайного процесса, называемой спектральной плотностью. Во многих случаях, особенно при изучении преобразования стационарных случайных процессов линейными системами управления, спектральная плотность оказывается более удобной характеристикой, чем корреляционная функция.
Спектральная плотность |
Sx (ω) |
случайного процесса |
X (t) |
определяется как преобразование
Rx ( ) , т. е.
|
|
Sx (ω) = |
Rx |
|
− |
Фурье
(τ)e |
− jωτ |
|
корреляционной функции
dτ .
Если воспользоваться формулой Эйлера e− jωτ = cosωτ − j sin ωτ ,
то можно представить как
|
|
|
Sx (ω) = |
Rx (τ) cosωτdτ − j Rx (τ) sin ωτdτ |
|
|
− |
− |
Так как Rx (τ) sin ωτ – нечетная функция |
τ , то |
выражении второй интеграл равен нулю. Учитывая, что четная функция τ , получаем
в последнем
Rx (τ) cosωτ –
Поскольку
Sx (ω)
cos ωτ =
= Rx (τ) cosωτdτ = 2 Rx (τ) cosωτdτ .
− |
0 |
cos( −ωτ) , то следует, что |
|
|
Sx (ω) = Sx (−ω) . |
Таким образом, спектральная плотность Sx (ω) является
действительной и четной функцией частоты ω . Поэтому на графике спектральная плотность всегда симметрична относительно оси
113
ординат.
Если спектральная плотность известна, то по формуле обратного преобразования Фурье можно найти соответствующую ей корреляционную функцию:
|
1 |
|
|
Rx (τ) = |
S x (ω)e |
||
|
|||
|
2π |
||
|
|
− |
|
jωτ
dω =
1 π
S x (ω)e 0
jωτ
dω
.
5.2.Связь между корреляционными функциями
испектральными плотностями случайного процесса на входе и выходе линейной системы
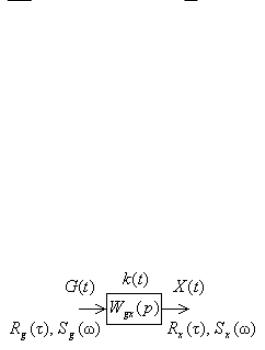
Рассмотрим линейную систему автоматического управления (рис. 5.2), имеющую передаточную функцию Wgx ( p) и импульсную
переходную функцию (функцию веса)
k
(t)
.
Рис. 5.2
Предположим, случайный процесс
что на вход этой системы подан стационарный G(t) , имеющий корреляционную функцию Rg ( )
и спектральную плотность
S g
( )
. Если рассматриваемая линейная
система устойчива и сама стационарна, то установившийся выходной
сигнал |
X (t) |
также будет стационарным случайным процессом, |
однако его статистические характеристики будут отличаться от статистических характеристик входного сигнала.
Допустим, что случайный процесс X (t) имеет корреляционную
функцию
R |
( ) |
x |
|
и спектральную плотность
S |
( ) |
x |
|
. Установим связь
между корреляционными функциями и спектральными плотностями случайных процессов на входе и выходе системы.
Связь между реализациями x(t) случайного процесса X (t) на выходе системы и соответствующими реализациями g (t) случайного процесса G(t) на входе системы на основании формулы свертки
114

выражается через импульсную переходную функцию следующим образом:
k (t)
где
|
|
|
|
|
x(t) = |
k (t − λ)g (λ)dλ = |
g (t − λ)k (λ)dλ |
|
|
− |
− |
λ |
– независимая переменная интегрирования. |
||
Связь между корреляционными функциями:
,
|
|
|
Rx ( ) = |
k (λ)dλ k (η)Rg (τ + λ |
|
|
− |
− |
−
η)dη
.
Это выражение является основным интегральным соотношением, позволяющим по известной корреляционной функции
Rg ( ) |
случайного процесса на входе системы и известной |
импульсной переходной корреляционную функцию
системы.
Формула перехода от плотности:
функции |
k (t) |
системы |
найти |
Rx ( ) случайного |
процесса на |
выходе |
|
корреляционной функции к спектральной
S |
x |
(ω) = |
|
|
|
|
− |
|
|
Rx (τ)e |
||
|
|||
− |
|
||
jωτ
dτ
.
Определим теперь связь между спектральными плотностями входного и выходного случайных процессов.
Связь между спектральными плотностями:
S |
|
(ω) =W |
( jω)W |
(− jω)S |
|
(ω) =| W |
( jω) | |
2 |
x |
x |
|
||||||
|
gx |
gx |
|
gx |
|
|
Sg
(ω)
.
Таким образом, спектральная плотность стационарного случайного процесса на выходе линейной системы равна спектральной плотности случайного процесса на входе системы, умноженной на квадрат модуля частотной передаточной функции этой системы.
Формула, связывающая корреляционную функцию
выходного сигнала и спектральную сигнала:
Rx (τ) = 1 | Wgx ( jω) |2
2π −
плотность
S g (ω)e jωτ dω
S |
g |
( ) |
|
|
.
входного
115
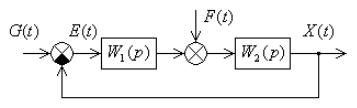
5.3. Расчет линейных систем при случайных воздействиях
Рассмотрим замкнутую линейную следящую систему (рис. 5.3), предназначенную для возможно более точного воспроизведения случайного полезного сигнала G(t) , действующего на входе системы,
при наличии случайной помехи точке системы.
F (t)
, приложенной в произвольной
Рис. 5.3
Внешние воздействия обычно задаются корреляционными функциями Rg (τ) и R f (τ) или спектральными плотностями S g (ω) и
S f (ω) . Если полезный сигнал и помеха коррелированы, то задается
также взаимная корреляционная функция
спектральная плотность S gf (ω). |
|
Если внешние воздействия |
G(t) |
Rgf
и
(τ) или
F (t)
взаимная
являются
стационарными случайными процессами, то в устойчивой линейной системе с постоянными параметрами в установившемся режиме все
координаты системы [например, регулируемая |
величина |
X (t) , |
ошибка E(t) и т. д.] также будут являться |
стационарными |
|
случайными процессами. В отличие от детермированных систем при расчете систем, подверженных случайным внешним воздействиям, находят не мгновенные значения интересующих нас координат системы, а их статистические (вероятностные) характеристики.
При расчете системы сначала по заданным корреляционным функциям или спектральным плотностям внешних воздействий определяют корреляционные функции или спектральные плотности интересующих нас координат системы, а затем, используя их, находят математическое ожидание, дисперсию и другие статистические характеристики этих координат.
Связь между корреляционными функциями входных
116