

6.МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ МНОГОМЕРНЫХ САУ
6.1.Математические модели «вход-выход» многомерных САУ
Многомерными системами или системами многосвязного управления называют автоматические системы управления, в которых имеется несколько (больше одной) управляемых величин. Соответственно объекты, имеющие несколько управляемых величин, называют многомерными объектами или объектами многосвязного управления.
Примерами многомерных объектов могут быть: синхронный генератор, у которого регулируются напряжение и частота выходного сигнала; самолет, у которого управляемыми величинами являются курс, углы тангажа и крена, высота, скорость, боковое отклонение.
Обычно управляемые величины называют выходами или выходными величинами. Поэтому многомерные системы еще
определяют |
как |
автоматические системы с |
многомерным |
|||||
(векторным) выходом. |
|
|
|
|
|
|
||
Многомерные |
системы |
и |
объекты |
называют |
линейными |
|||
и стационарными, |
если |
они |
описываются |
системой |
линейных |
|||
дифференциальных уравнений с постоянными коэффициентами. |
||||||||
Математическая модель |
«вход-выход» |
– |
это |
описание связи |
||||
входных и выходных сигналов динамической системы. Необходимость в таком описании появляется при рассмотрении поведения как отдельных блоков и, в частности, объекта управления, так и всей системы управления в целом.
6.1.1. Уравнения многомерных звеньев и систем управления.
Многомерная система предполагает наличие многомерного объекта управления (рис. 6.1), который характеризуется наличием нескольких входов различных управляющих, возмущающих воздействий и нескольких выходов, определяемых регулируемыми величинами.
118
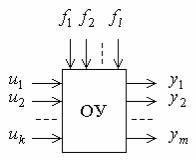
Рис. 6.1
Пусть y1, , ym обозначают выходные величины, u1, ,uk – сигналы управления или задающие воздействия и f1, , f l – возмущающие воздействия. Тогда уравнения многомерных стационарных линейных систем и объектов в общем случае можно записать в виде следующей системы:
m |
k |
l |
|
|
aij(p)yj(t) bij(p)uj(t) cij(p) fj(t), |
i 1, , m. |
(6.1) |
||
j 1 |
j 1 |
j 1 |
|
|
Здесь aij(p), bij(p), cij(p) обозначают стационарные линейные |
||||
операторы, т. |
е. полиномы от оператора дифференцирования |
|||
с постоянными |
коэффициентами. |
Переходя в |
обеих частях |
(6.1) |
к изображениям Лапласа, при нулевых начальных условиях получим систему алгебраических уравнений
m |
k |
l |
|
aij(p)Yj(p) bij(p)U j(p) cij(p)Fj(p), |
i 1, , m, |
||
j 1 |
j 1 |
j 1 |
|
(6.2)
где Yj(p) L[yj(t)],U j(p) L[uj(t)], Fj(p) L[fj(t)].
Для многомерных систем удобна матричная форма записи уравнений. Введем в рассмотрение матрицы
|
y1(t) |
||||
y(t) |
|
|
|
, |
|
|
|
|
|
|
|
|
y |
m |
(t) |
||
|
|
|
|
||
|
u1(t) |
||||
u(t) |
|
|
|
, |
|
|
|
|
|
|
|
|
u |
k |
(t) |
||
|
|
|
|
|
|
|
a11(p) |
|||
A(p) |
|
|
||
|
|
|
|
(p) |
|
a |
m1 |
||
|
|
|
||
|
b11(p) |
|||
B(p) |
|
|
||
|
|
|
(p) |
|
|
b |
|
||
|
m1 |
|
|
|
a1m(p)
,
amm(p)
b1k (p)
,
bmk (p)
119
|
f1(t) |
|||
f(t) |
|
|
|
, |
|
|
|
|
|
|
f |
l |
(t) |
|
|
|
|
|
|
|
c11(p) |
c1l(p) |
|||||
C(p) |
|
|
|
|
. |
||
|
|
|
(p) |
c |
|
|
|
|
c |
m1 |
ml |
(p) |
|||
|
|
|
|
|
|
||
С их помощью (6.1) в матричной форме будет:
A(p)y(t) B(p)u(t) C(p)f(t). |
(6.3) |
Точно так же можно записать (6.2) в изображениях |
Лапласа |
в матричной форме |
|
A(p)Y(p)
Здесь
|
Y1(p) |
||||
Y(p) |
|
|
|
, |
|
|
|
|
|
|
|
|
Y |
|
(p) |
||
|
m |
|
|
|
|
|
U1(p) |
||||
U(p) |
|
|
|
|
, |
|
|
|
|
|
|
|
U |
k |
(p) |
||
|
|
|
|
||
|
F1(p) |
||||
F(p) |
|
|
|
, |
|
|
|
|
|
|
|
|
F (p) |
||||
|
|
l |
|
|
|
B(p)U(p) C(p)F(p). |
|
|
|
(6.4) |
||||||||
|
a11(p) |
a1m(p) |
||||||||||
A(p) |
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
(p) |
a |
|
|
|
|
|
|
|
a |
m1 |
mm |
(p) |
||||||||
|
|
|
|
|
|
|
||||||
|
b11(p) |
b1k (p) |
||||||||||
B(p) |
|
|
|
|
|
|
|
|
, |
|||
|
|
|
|
|
(p) |
b |
|
|
|
|
|
|
|
b |
|
|
|
|
(p) |
||||||
|
|
|
m1 |
|
|
mk |
|
|
||||
|
c11(p) |
c1l(p) |
||||||||||
C(s) |
|
|
|
|
|
|
|
|
|
. |
||
|
|
|
|
(p) |
c |
|
|
|
|
|
|
|
|
c |
m1 |
ml |
(p) |
||||||||
|
|
|
|
|
|
|
|
|||||
В (6.3) после умножения и сложения матриц в правой и левой частях получатся матрицы – столбцы. Приравняв их соответственные элементы, получим систему уравнений (6.1). Аналогично, выполнив указанные операции над матрицами и приравняв соответственные элементы матриц левой и правой частях матричного уравнения (6.4), получим систему (6.2).
Запись дифференциальных уравнений обьекта управления или системы управления в виде (6.3) или (6.4) называется уравнениями «вход-выход». Эти уравнения позволяют полностью описать статические и динамические свойства обьекта управления или системы управления.
Пример 6.1. Пусть исходная система дифференциальных уравнений имеет вид
120
(a0 p a1)y1 a2y2 b0 pu1 b1u2,
a3y1 (a4 p a5)y2 b2u2 .
В матричной форме, как нетрудно проверить, эта система записывается в виде
A(p)y(t) B(p)u(t),
где
a0 p a1 |
|
|
a2 |
|
b0 p |
b1 |
|||
A(p) |
a |
a |
4 |
p a |
|
; B(p) |
0 |
b |
. |
|
3 |
|
|
5 |
|
|
2 |
|
|
6.1.2. Передаточные матрицы. Для описания многомерных систем и объектов, как и в случае одномерных систем, можно использовать передаточные функции. Передаточной функцией
Wiju(p) (в изображениях Лапласа) по j-му параметру управления и i-му выходу называют отношение изображения Лапласа выходной
величины yi к изображению входной величины uj |
при нулевых |
|||
начальных условиях. По определению |
|
|||
Wu |
(p) |
Yi(p) |
. |
(6.5) |
|
||||
ij |
U j(p) |
|
||
|
|
|||
Эту передаточную функцию можно вычислить следующим образом. В системе (6.2) приравниваем нулю изображения всех возмущающих воздействий и параметров управления, кроме U j(p).
Из полученной системы алгебраических уравнений находим решение Yi(p), а затем, разделив его на U j(p), получим искомую
передаточную функцию.
Аналогично определяют передаточную функцию Wijf (p) по j-му возмущающему воздействию и i-му выходу
W f |
(p) |
Yi(p) |
. |
(6.6) |
|
||||
ij |
|
Fj(p) |
|
|
|
|
|
||
В случае многомерных систем (объектов) для ее полного описания необходимо иметь m k передаточных функций по управлению и m l передаточных функций по возмущению. Эти передаточные функции записывают в виде матриц:
121
|
Wu |
(p) |
Wu |
(p) |
|
|
|||||||||
Wu |
|
11 |
|
|
|
|
|
1k |
|
|
|
|
|
||
(p) |
|
|
|
|
|
|
|
|
|
, |
(6.7) |
||||
|
|
|
u |
|
(p) |
|
W |
|
u |
|
(p) |
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|||||
|
|
m1 |
|
|
|
mk |
|
|
|
|
|||||
|
|
|
f |
|
|
(p) |
|
W |
f |
|
(p) |
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
||||||
W f |
|
11 |
|
|
|
|
|
1l |
|
|
|
|
|||
(p) |
|
|
|
|
|
|
. |
(6.8) |
|||||||
|
|
|
f |
|
|
(p) |
|
W |
f |
|
(p) |
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
||||||
|
|
m1 |
|
|
|
ml |
|
|
|
|
|||||
Матрицы (6.7) и (6.8) называют матрицами передаточных функций или передаточными матрицами: матрица (6.7) – по управлению, а матрица (6.8) – по возмущению.
Передаточные матрицы дают полное описание многомерных систем (объектов) при нулевых начальных условиях. С их помощью (6.2) или (6.4) многомерной системы в изображениях Лапласа можно записать в следующем виде:
Y(p) Wu(p)U(p) W f (p)F(p). |
(6.9) |
Для получения передаточных матриц умножим слева обе части матричного уравнения
A(p)Y(p) B(p)U(p) C(p)F(p).
на обратную матрицу A 1(p). Тогда получим
Y(p) A 1(p)B(p)U(p) A 1(p)C(p)F(p).
Приравнивая правую часть полученного уравнения к правой части равносильного ему уравнения (6.9), получим следующие соотношения
|
|
Wu(p) A 1(p)B(p), |
|
|
|
|
W f (p) A 1(p)C(p). |
|
(6.10) |
|||||||||||||||||
Как известно из курса высшей алгебры, обратная матрица |
|
|||||||||||||||||||||||||
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
A (p) |
A |
(p) т |
|
|
|||||||
|
|
|
|
1 |
|
|
|
|
11 |
|
1m |
|
|
|
|
|
||||||||||
|
A |
1 |
(p) |
|
|
A(p) |
|
|
|
|
|
|
|
|
|
. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
A(p) |
|
|
|
|
A(p) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
(p) |
A |
|
|
(p) |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
|
mm |
|
|
|
|
||
Здесь |
|
– |
присоединенная |
матрица; |
Aij(p) |
– |
алгебраическое |
|||||||||||||||||||
A(p) |
|
|||||||||||||||||||||||||
дополнение элемента aij(p); знак «т» обозначает операцию транспонирования матрицы.
122
Пример 6.2. Пусть система (объект) описывается уравнениями
|
y1 y1 y2 u1 f1, |
y1 y1 y2 u2 f2. |
|
|||||||||||||||
Перейдем к изображениям Лапласа (при нулевых начальных |
||||||||||||||||||
условиях) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p2 p)Y (p) Y (p) U |
1 |
(p) F (p); |
|
||||||||||||||
|
|
|
|
1 |
2 |
|
|
|
|
|
|
1 |
|
|
||||
|
(p 1)Y1(p) pY2(p) U2(p) F(p) |
|
||||||||||||||||
В матричной форме эта система записывается так: |
|
|||||||||||||||||
|
A(p)Y(p) B(p)U(p) C(p)F(p), |
|
||||||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
p |
|
|
B(p) |
1 |
|
|
0 |
|
1 |
0 |
|||||
A(p) p |
|
1 ; |
|
|
|
|
|
; |
C(p) |
. |
||||||||
|
p 1 |
|
p |
|
|
|
0 |
|
|
1 |
|
0 |
1 |
|||||
Найдем обратную матрицу A 1(p): |
|
|
|
|
|
|
|
|||||||||||
|A(p)| (p 1)(p2 1), |
|
|
|
|
|
|
|
|
|
|
|
|||||||
A p, |
|
A |
(p 1), |
A |
|
|
1, |
A |
p2 p, |
|||||||||
11 |
|
12 |
|
|
|
|
21 |
|
|
|
|
|
22 |
|
||||
A 1(p) |
|
1 |
|
p |
|
(p 1) т |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||
(p 1)(p2 |
|
|
|
|
p |
p |
|
|||||||||||
|
|
|
1) 1 |
|
|
|
|
|
|
|
||||||||
|
|
1 |
|
|
|
p |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
2 |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
(p 1)(p2 1) (p 1) |
|
p |
|
|
|
||||||||||||
Так как B(p) |
и C(p) являются единичными матрицами, то |
|||||||||||||||||
Wu(p) Wf (p) A 1(p).
6.1.3. Весовые или импульсные переходные матрицы. Пусть управляющий сигнал uj δ(t), а остальные управляющие сигналы и
возмущающие воздействия равны нулю. При этом решение (6.7) многомерной системы при нулевых начальных условиях обозначим
w1uj(t), w2uj(t), , wmju (t). Эти функции называют весовыми или импульсными переходными функциями. Функция wij(t) описывает
реакцию системы на i-м выходе при действии в точке приложения j-го параметра управления единичного импульса и называется импульсной переходной или весовой функцией по j-му параметру управления и i-му выходу.
123
Матрицу
|
wu |
(t) |
wu |
(t) |
|
|
|||
wu |
|
11 |
|
|
|
1k |
|
|
|
(t) |
|
|
|
|
|
|
, |
(6.11) |
|
|
wu |
|
(t) |
wu |
(t) |
|
|
||
|
|
m1 |
|
|
mk |
|
|
|
|
составленную из весовых функций по управлению, называют импульсной переходной или весовой матрицей по управлению. Аналогично определяют импульсную переходную или весовую матрицу по возмущению
|
|
wf |
(t) |
wf |
(t) |
|
||||
|
w f |
|
11 |
|
|
|
|
1l |
|
|
|
(t) |
|
|
|
|
|
|
. |
(6.12) |
|
|
|
wf |
|
(t) |
wf |
(t) |
|
|||
|
|
|
m1 |
|
|
|
ml |
|
|
|
Здесь wf |
(t), wf |
(t), , wf |
|
|
(t) |
– |
решение (6.1) |
многомерной |
||
1j |
2 j |
|
mj |
|
|
|
|
|
||
системы, когда |
fj δ(t), а все остальные возмущающие воздействия |
|||||||||
и параметры управления равны нулю.
Весовые матрицы, как и передаточные матрицы, дают полное описание многомерной системы (объекта) при нулевых начальных условиях.
Соотношение между весовыми и передаточными матрицами:
Wu(p) L{wu(t)} wu(t)e stdt,
0
W f (p) L{w f (t)} wf (t)e stdt.
0
Связь между выходными и входными величинами с помощью весовых матриц записывается так же, как и в одномерном случае:
y(t) wu (t τ)u(τ)dτ w f (t τ)f(τ)dτ.
0 0
6.1.4. Уравнения замкнутых многомерных систем управления. На рис. 6.2 изображена структурная схема замкнутой многомерной системы регулирования. На схеме все указанные символы соответствуют матрицам: g(t) – задающих воздействий, y(t) – регулируемых величин, x(t) – ошибок для каждой регулируе-
124
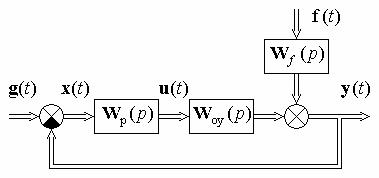
мой величины, u(t) – управляющих воздействий, f(t) – возмущений, Wоу(p) – передаточных функций объекта управления, Wf (p) –
передаточных функций для возмущений. Кроме того, введена прямоугольная матрица передаточных функций регулирующего устройства Wр(p), которая определяет используемые законы
регулирования. Она дает связь между изображениями управляющих величин и ошибок:
U(p) Wр(p)X(p).
Уравнения многомерной системы (рис. 6.2) могут быть получены действиями, аналогичными одномерному случаю.
|
|
Рис. 6.2 |
|
|
|
|
|||
В общем случае замкнутая многомерная |
система, содержащая |
||||||||
произвольное число m выходных величин, k |
входных воздействий |
||||||||
и l возмущений, описывается следующим уравнением |
|
||||||||
Y(p) Фg (p)G(p) Фf (p)F(p), |
(6.13) |
||||||||
где |
Фg (p) |
Фg |
|
|
|
|
|||
|
|
(p) |
|
||||||
Фg |
|
11 |
|
|
1k |
|
|
|
|
(p) |
|
|
|
|
|
, |
(6.14) |
||
|
Фg |
(p) |
Фg |
|
(p) |
|
|||
|
|
m1 |
|
|
mk |
|
|
|
|
|
Фf |
(p) |
Фf |
|
(p) |
|
|||
Фf |
|
11 |
|
|
1l |
|
|
|
|
(p) |
|
|
|
|
. |
(6.15) |
|||
|
Фf |
|
(p) |
Фf |
|
(p) |
|
||
|
|
m1 |
|
ml |
|
|
|
||
Матрицы (6.14) и (6.15) называют матрицами передаточных |
|||||||||
функций или передаточными матрицами |
|
замкнутой |
системы |
||||||
125
управления: матрица (6.14) – по управлению, а матрица (6.15) – по возмущению.
Передаточная матрица замкнутой системы Фi(p) определяется по формулам, аналогичным формулам, выражающим передаточную функцию замкнутой одномерной системы по структурной схеме, и передаточным функциям звеньев, с той только разницей, что вместо
передаточных функций в |
данном |
случае |
фигурируют матрицы. |
||||
В частности, аналогично формуле для одномерной системы |
|||||||
Фg (p) [E W(p)] 1Wyg (p); |
|
(6.16) |
|||||
Фf (p) [E W(p)] 1Wy f (p), |
|
(6.17) |
|||||
где E – единичная матрица; |
|
W11(p) |
W1m(p) |
||||
|
|
||||||
W(p) W (p)W (p) |
|
|
|
|
|
||
оу |
р |
|
|
(p) |
W |
|
|
|
|
W |
(p) |
||||
|
|
|
m1 |
|
|
mm |
|
– передаточная матрица разомкнутой системы;
Wyg (p) Wоу(p)Wр(p), Wyf (p) Wf (p)
–передаточные матрицы прямых каналов.
6.2.Уравнения состояния
6.2.1.Запись дифференциальных уравнений в нормальной форме Коши. При рассмотрении многих вопросов удобно, если уравнения одномерных и многомерных систем записаны в виде
нормальной системы. Нормальной системой или системой в нормальной форме Коши называют систему дифференциальных уравнений первого порядка, разрешенных относительно производных. В частности, нормальной системой линейных дифференциальных уравнений называют систему
n |
k |
xi aijxj bijuj; |
|
j 1 |
j 1 |
m |
(6.18) |
y cijxj, |
i 1, , n. |
j 1 |
|
126
В матричной форме она записывается как |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
x Ax Bu; |
|
|
|
|
(6.19) |
||||
|
|
|
|
|
|
|
|
y Cx, |
|
|
|
|
|
|
|||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x1 |
|
x1 |
|
a11 |
a1n |
u1 |
|||||||||||
|
|
|
|||||||||||||||
x |
|
, |
x |
|
, |
A |
|
|
|
|
, |
u |
, |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
a |
|
a |
|
|
u |
|
|||
|
|
x |
|
n1 |
|
||||||||||||
|
|
|
n |
|
|
|
n |
|
|
|
|
nn |
|
|
k |
||
|
b11 |
b1k |
y1 |
c11 |
c1n |
||||||||||||
B |
|
|
|
|
|
, |
y |
|
, |
C |
|
|
|
|
. |
||
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
b |
|
|
y |
|
|
c |
m1 |
|
|
|||||||
|
|
|
n1 |
|
nk |
|
|
m |
|
|
mn |
||||||
Матрицы-столбцы x, u и y также называют векторами. Вектор |
|||||||||||||||||
x называют |
фазовым |
|
вектором |
или |
вектором |
состояния, а его |
|||||||||||
координаты x1, , xn – фазовыми координатами. Вектор u называют вектором управления или просто управлением, а его координаты u1, ,uk – управляющими воздействиями. Вектор y называют вектором выхода, а его координаты y1, , ym– выходными координатами.
Под состоянием объекта (или динамической системы) понимается совокупность величин, полностью определяющих его динамику в данный момент времени. Обычно под состоянием объекта понимается совокупность значений выходных координат и их производных.
Будем определять состояние объекта (динамической системы) вектором x с компонентами x1, x2, , xn. Множество этих векторов составляет n мерное пространство состояний (фазовое пространство), которое может рассматриваться как абстрактное n-мерное пространство. Совокупность n линейно независимых векторов в этом пространстве образует базис. Каждая компонента xi является проекцией вектора состояния x на соответствующий вектор базиса.
Уравнения движения объекта можно привести к такому виду, в котором каждое из уравнений имеет первый порядок:
x Ax Bu;
y Cx,
где вход u и выход y представляют собой соответственно k-мерные
127