

и m-мерные векторы, а размерность вектора x совпадает с порядком системы n; матрицы A, B и C являются числовыми.
Все составяющие векторов входа и выхода являются конкретными физическими величинами. Вектор же состояния может рассматриваться как некоторая абстрактная характеристика объекта. Физическая природа фазовых координат не является существенной. Координаты xi зависят от выбора базиса n-мерного линейного пространства состояний. Изменение базиса соответствует переходу к новым фазовым координатам xi , но не отражается на входных u и выходных y координатах, описывающих изменение конкретных физических величин.
Структурная схема модели вход-состояние-выход объекта в соответствии с уравнениями состояния (6.19) приведена на рис. 6.3.
Рис. 6.3. Структурная схема модели вход-состояние-выход
6.2.2. Преобразование дифференциальных уравнений к нормальной системе. Дифференциальные уравнения, разрешимые относительно старшей производной, всегда можно привести к нормальной системе. Рассмотрим, как преобразуются уравнения одномерной стационарной линейной системы управления.
Пусть система управления описывается уравнением
|
|
(a pn a pn 1 |
a |
n |
)y b u. |
|
|
(6.20) |
|||||||||
|
|
0 |
|
1 |
|
|
|
|
|
0 |
|
|
|
|
|||
Введем новые переменные |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
x1 y; x1 x2; x2 |
x3; ; xn 1 xn. |
|
|
(6.21) |
|||||||||||
Из (6.20) и (6.21) следует |
|
|
|
|
|
|
|
|
|
b0 |
|
|
|||||
x |
n |
pny |
1 |
(a x a |
2 |
x |
n 1 |
a |
n |
x ) |
u. |
(6.22) |
|||||
|
|
||||||||||||||||
|
|
a |
0 |
1 n |
|
|
|
|
|
1 |
a |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
128
Объединяя (6.21) и (6.22), получим нормальную систему
|
|
x2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
x3; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.23) |
|||
x |
n |
|
1 |
(a x |
n |
a |
2 |
x |
n 1 |
a |
x ) |
b0 |
u; |
|
||||||
|
|
|
||||||||||||||||||
|
|
a |
1 |
|
|
|
|
n |
1 |
|
a |
0 |
|
|
||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y x1, |
|
|
|
|
уравнению |
(6.20). |
В этом |
случае при |
||||||||||||
эквивалентную исходному |
|
|||||||||||||||||||
a0 1 получаем следующие матрицы уравнений состояния |
||||||||||||||||||||
|
|
0 |
|
|
1 |
|
|
0 |
|
|
0 |
|
|
|
|
0 |
||||
|
|
0 |
|
|
0 |
|
|
1 |
|
|
0 |
|
|
|
|
0 |
|
|||
A |
|
|
|
|
|
|
|
|
|
|
|
; |
B |
; |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
an 1 |
an 2 |
|
|
|
|
|
|
|
|
|
||||||
an |
a1 |
|
|
|
b0 |
|||||||||||||||
|
|
|
|
|
|
C 1 0 |
|
0 |
|
0 . |
|
|
|
|
|
|
||||
Используя обозначения (6.21), легко определить решение (6.23), имея решение (6.20), и, наоборот, определить решение (6.20), имея решение (6.23).
Рассмотрим более общий случай, когда система управления описывается уравнением
(a0 pn a1pn 1 an)y
(b |
pm b pm 1 |
b )u, |
m n. |
(6.24) |
0 |
1 |
m |
|
|
Учитывая, что в этом уравнении дифференциальные операторы при выходной и входной величинах и обратные им операторы коммутативны, запишем его в виде
(b0 pm b1pm 1 bm) 1 y (a0 pn a1pn 1 an) 1u x1
или
y (b pm |
b pm 1 |
b |
|
)x ; |
(6.25) |
||
0 |
|
|
1 |
m |
1 |
|
|
u (a |
0 |
pn |
a pn 1 |
a |
n |
)x . |
(6.26) |
Введем обозначения |
|
1 |
|
1 |
|
||
|
|
|
|
|
|
|
|
x1 x2; x2 x3; ; xn 1 xn. |
(6.27) |
||||||
129
Учитывая их, из уравнения (6.26) получаем
x |
n |
|
1 |
(a x |
n |
a |
2 |
x |
n 1 |
a |
n |
x ) |
1 |
u. |
|
|
|
||||||||||||||
|
|
a |
1 |
|
|
|
1 |
a |
|||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
Объединяя это уравнение с уравнениями (6.27), получаем нормальную систему
|
|
x2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
x3; |
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
(6.28) |
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
x |
n |
|
1 |
(a x |
n |
a |
2 |
x |
n 1 |
a |
n |
x ) |
1 |
u. |
|
|
|
||||||||||||||
|
|
a |
1 |
|
|
|
1 |
a |
|||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
эквивалентную исходному уравнению (6.24). Выходная переменная системы управления и новые переменные связаны соотношением
(6.25)
y b0xm 1 b1xm bmx1. |
(6.29) |
Обратный переход от уравнений состояния к передаточной матрице объекта осуществляется по формуле
W(p) C(pE A) 1B, |
(6.30) |
где E – единичная матрица.
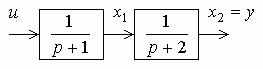
Пример 6.3. Рассмотрим переход от уравнений вход-выход и передаточных функций к уравнениям состояния объекта.
Пусть, например, уравнение вход-выход имеет вид
Q(p)y R(p)u,
где Q(p) (p 1)(p 2); R(p) 1; n 2;m 1.
Передаточная функция:
W(p) |
R(p) |
|
1 |
. |
|
(p 1)(p 2) |
|||
|
Q(p) |
|
||
Структурная схема объекта приведена на рис. 6.4.
Рис. 6.4. Структурная схема объекта
Пусть x1 соответствует выходному сигналу первого звена, а x2 –
130
выходному сигналу второго звена. Тогда данный объект может быть описан следующей системой уравнений первого порядка:
|
|
(p 1)x1 |
u; |
|
|
|
(p 2)x2 x1; |
|
|
или |
|
y x2, |
|
|
|
x1 x1 u; |
|
||
|
|
|
||
|
|
x2 2x2 x1; |
||
|
|
y x2. |
|
|
Уравнения состояния при этом имеют вид |
||||
|
|
x Ax Bu; |
|
|
где |
|
y Cx, |
|
|
|
|
|
|
|
1 |
0 |
1 |
C 0 1 . |
|
A |
1 |
; B ; |
||
|
2 |
0 |
|
|
Рассмотренный переход к уравнениям состояния не является единственным. Пусть, как и прежде,
Q(p) (p 1)(p 2) p2 3p 1; R(p) 1.
Тогда уравнение объекта имеет вид
(p2 3p 1)y u
или
d2y 3dy 2y u. dt2 dt
Пусть
x1 y; x2 dx1 , dt
тогда уравнение объекта принимает вид:
dx2 3x2 2x1 u dt
и в результате получим следующую систему уравнений первого порядка:
131

dx1 x2; dt
|
|
dx2 |
3x |
2 |
2x u; |
|
|
|
|
||||
|
|
dt |
|
|
1 |
|
|
|
|
|
|
|
|
или |
|
y x1, |
|
|
||
|
x1 x2; |
|
|
|||
|
|
|
|
|||
|
|
x2 3x2 2x1 u; |
||||
|
|
y x1. |
|
|
||
Уравнения сотояния при этом имеют вид: |
||||||
|
|
|
|
x Ax Bu; |
||
где |
|
|
|
y Cx, |
||
0 |
|
1 |
|
0 |
||
|
|
|
||||
A |
|
|
|
; B |
; C 1 0 . |
|
2 |
3 |
|
1 |
|||
Переход от уравнений состояния к передаточной функции |
||||||
объекта осуществляется по формуле |
||||||
|
W(p) C(pE A) 1B. |
|||||
Пример 6.4. Необходимо получить математические модели |
||||||
продольного движения |
|
самолета |
|
в виде уравнений «вход-выход» |
||
и уравнений состояния.
Решение. Рассмотрим движение самолета в продольной плоскости, совпадающей с плоскостью его симметрии. Это движение характеризуется следующими угловыми координатами: углом
наклона траектории θ, |
образуемым вектором |
скорости V |
и горизонтальной плоскостью, углом тангажа |
(углом между |
|
продольной осью самолета x |
и горизонтальной плоскостью) и углом |
|
атаки α, составленным вектором скорости и продольной осью x. Эти углы связаны кинематическим соотношением (см. рис. 1.9):
α θ.
Воздействиями, с помощью которых можно управлять движением самолета, являются изменение положения руля высоты δв и изменение тяги двигателей δр. В качестве выходных координат можно принять величину скорости V и один из углов: или θ.
132
Линеаризованные уравнения движения в проекциях на естественные оси (касательную и нормаль к траектории полета) имеют вид:
(p n11)v n12α n13 nрδр;
n21v (p n22)α (p n23) 0;
n31v (n30 p n32)α (p2 n33p) nвδв .
В данных уравнениях все выходные переменные и управляющие воздействия представлены в относительных отклонениях. Коэффициенты уравнений зависят как от аэродинамических и весовых характеристик самолета, так и от режима полета. При изменении высоты и скорости полета величины коэффициентов изменяются в широких пределах.
Исключая переменные θ и α, |
получим систему |
уравнений |
в форме вход-выход, связывающей |
непосредственно |
входные |
переменные (отклонения тяги δp и руля высоты δв) и выходные |
||
(отклонение скорости полета v и угла тангажа ): |
|
|
[(p n11)(p n22) n12n21]v [(p n22)n13 |
|
|
(p n23)n12] (p n22)nр р ; |
|
|
|
[(p n )(n |
|
p n ) n n ]v [(p2 n |
p)n |
|
|
|
||||||||||||
|
|
11 |
30 |
|
32 |
|
12 |
31 |
|
|
|
|
33 |
12 |
|
|
|
||
|
(n30 p n32)n13] (n30 p n32)nр р n12nв в . |
|
|
|
|||||||||||||||
Вводя обозначения |
v |
|
|
δр |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
y |
; |
|
δ |
; |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
A(p) |
|
|
|
|
|
|
|
|
|
||
(p n11)(p n22) n12n21 |
|
(p n22)n13 (p n23)n12 |
|
|
; |
||||||||||||||
(p n )(n |
p n ) n n |
(n |
p n )n |
(p2 n p)n |
|
||||||||||||||
|
11 |
30 |
|
|
31 |
12 |
31 |
|
30 |
|
|
32 |
13 |
|
33 |
12 |
|
|
|
|
|
|
|
|
|
(p n22)nр |
|
|
0 |
|
|
|
|
|
|
||||
|
|
|
B(p) (n |
p n )n |
|
n n |
, |
|
|
|
|
||||||||
|
|
|
|
|
|
|
30 |
|
32 |
р |
12 |
в |
|
|
|
|
|||
получаем уравнения «вход-выход»:
A(p)y B(p)u.
Передаточная матрица объекта
|
1 |
|
1 ~ |
|
W(p) A |
|
(p)B(p) |
|
A(p)B(p), |
|
|
|||
|A(p)|
133
где |A(p)| p4 c |
p3 c |
2 |
p2 c p c ; n 4. |
||
1 |
|
3 |
4 |
|
|
Для получения математической модели самолета в виде системы |
|||||
уравнений первого порядка введем переменные состояния: |
|||||
|
x1 v; |
x2 α; |
x3 ; |
x4 θ. |
|
Кроме того, обозначим: |
|
y2 . |
|||
u1 δр; |
u2 δв; |
y1 v; |
|||
Тогда исходные уравнения перепишутся в требуемой форме:
x1 n11x1 n12x2 n13x3 nрu1; x2 n21x1 n22x2 n23x3 x4;
x3 x4;
x4 (n31 n30n21)x1 (n30n22 n32)x2 n30n23x3(n30 n33)x4 nвu2;
y1 x1; y2 x3.
6.3. Управляемость и наблюдаемость
Математическое описание линейной динамической системы может быть выполнено с помощью дифференциальных уравнений «вход-выход», передаточной и весовой матриц, с помощью
уравнений состояния. |
|
|
|
Дифференциальные |
уравнения |
– уравнения |
«вход-выход» |
и уравнения состояния |
полностью |
определяют |
статические |
и динамические свойства |
системы |
управления. |
Передаточные |
и весовые матрицы, полученные при нулевых начальных условиях, могут не отражать некоторых динамических особенностей системы. Это становится особенно очевидно при рассмотрении свойств
управляемости и наблюдаемости динамических систем. |
|
|||
Понятия управляемости |
и |
наблюдаемости |
были |
введены |
и развиты Р. Е. Калманом. |
|
|
|
|
Рассмотрение вопросов |
управляемости и |
наблюдаемости |
||
в системах управления проще |
всего производить, |
пользуясь |
||
описанием системы в терминах пространства состояний, т. е. записывая уравнения движения в виде
x Ax Bu;
(6.31)
y Cx.
134
Как уже упоминалось, выбор базиса в пространстве состояний
является произвольным. Смена базиса |
~ |
Tx, где T |
– матрица |
||||||||
x |
|||||||||||
коэффициентов и |T| 0, приводит к изменению фазовых координат |
|||||||||||
состояния и соответственно матриц A, B,C. В результате получаем |
|||||||||||
эквивалентную систему |
~ |
|
~~ |
~ |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
|
|
|
x |
Ax |
Bu; |
|
|
|
|||
|
|
|
|
|
~~ |
|
|
|
|
|
|
|
|
|
y Cx, |
|
|
|
|
|
|||
~ |
1 |
~ |
~ |
|
1 |
. |
|
|
|
|
|
где A TAT |
|
,B TB, |
C CT |
|
|
|
|
|
~ ~ ~ |
||
При некотором базисе может оказаться, |
|
||||||||||
что матрицы A, B,C |
|||||||||||
таковы, что |
часть входных |
сигналов |
uj |
не |
входит в |
некоторые |
|||||
дифференциальные уравнения, либо часть фазовых координат xl не участвует в формировании выхода y. В первом случае система будет не полностью управляемой, а во втором – не полностью наблюдаемой.
Понятие управляемости динамических систем непосредственно связано с выявлением возможности управляющих воздействий u изменить вектор состояния системы x в течение конечного отрезка времени.
Система (6.31) называется полностью управляемой, если она не эквивалентна системе вида
x1 A11x1 A12x2 B1u;
x2 |
A22x2; |
|
(6.32) |
y C1x1 C2x2, |
|
|
|
где размерность вектора |
x1 равна n , размерность |
x |
2 равна n , |
|
1 |
|
2 |
а n1 n2 n. Другими словами, система полностью управляема, если нельзя указать такой базис, при котором уравнения состояния разбиваются на две группы, так что в уравнения второй группы не входят ни фазовые координаты первой группы, ни входные сигналы u (рис. 6.5).
135
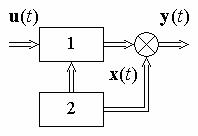
Рис. 6.5
Из (6.32) очевидно, что все фазовые координаты x2j
( j 1, 2, , n2) неуправляемы, так как на них не оказывает действие вход системы u ни непосредственно, ни через остальные координаты x1i (i 1, 2, , n1). Вектор фазовых координат x и матрицы A, B,C при этом имееют клеточную структуру
1 |
|
A |
A |
|
B |
|
, C C1 |
C2 . |
||
x x |
, A |
11 |
12 |
|
, B |
1 |
|
|||
x2 |
|
|
0 |
A22 |
|
0 |
|
|
|
|
Свойство управляемости системы определяется парой матриц
A, B и не зависит от вида матрицы C. |
|
||
Понятие |
наблюдаемости |
динамических систем |
связано |
с возможностью |
однозначного |
определения начального |
состояния |
системы x на основе знания реакции системы y на конечном интервале времени.
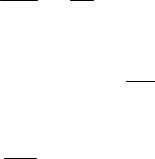
Система (6.31) называется полностью набдюдаемой, если она не эквивалентна системе вида
x1 A11x1 B1u;
x2 |
A21x1 A22x2 |
B2u; |
(6.33) |
y C1x1, |
|
|
|
где размерность вектора |
x1 равна n1, |
размерность |
x2 равна n2, |
а n1 n2 n. Другими словами, полностью наблюдаемой является система, для которой нельзя указать базис такой, чтобы фазовые координаты разбились на две группы, причем координаты второй группы x2 не входят ни в уравнения для координат первой группы, ни в алгебраические соотношения для выходных переменных y
(рис. 6.6).
136
Рис. 6.6
Из (6.33) очевидно, что все фазовые координаты x2j
( j 1, 2, , n2) ненаблюдаемы, так как они не оказывают влияния на выход системы y ни непосредственно, ни через остальные координаты x1i (i 1, 2, , n1). Матрицы A, B,C при этом имеют вид
A |
A11 |
0 |
, B |
B1 |
, C C |
0 . |
|
|
|
|
|
|
|
1 |
|
|
A21 |
A22 |
|
B2 |
|
|
|
Свойство наблюдаемости системы определяется парой матриц A,C и не зависит от вида матрицы B.
Для решения вопроса о том, является система полностью управляемой и наблюдаемой или нет, воспользоваться непосредственно определениями, приведенными выше, затруднительно. Ответ на этот вопрос дают критерии управляемости и наблюдаемости, предложенные Р. Е. Калманом и позволяющие судить о свойствах системы без перехода к другим базисам на основе исходной формы записи уравнений (6.31).
Составим из матриц A, B матрицу
U [B AB A2B An 1B]n kn, |
(6.34) |
имеющей n строк и kn столбцов. Критерий управляемости формулируется следующим образом. Размерность n1 управляемой части равна рангу матрицы U. Как ивестно, ранг матрицы – это наивысший порядок минора матрицы, не равного нулю. Очевидно, что n1 n. Система является полностью управляемой, если ранг матрицы U равен n.
При n1 n система полностью управляема, при 0 n1 n – не полностью управляема и при n1 0 – полностью неуправляема.
Аналогичный критерий имеет место и для свойства наблюдаемости системы. Составим из матриц A,C матрицу
137