

3535
.pdfTK |
2 HB |
h |
NПВ |
NСВ |
1 |
|
NПВ |
NСВ |
1 t1 |
t2 |
|
|
V |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Kt tП 4 |
|
tП 5 |
tC 4 |
tC 5 |
|
N ПВ |
NСВ |
1 t3 , |
||
|
|
|
|
|
|
|
|
|
|
(2.30) |
где H B K B H MAX |
- |
вероятностная высота подъема |
||||||||
кабины, м, КВ – коэффициент вероятности высоты подъема КВ=0,7…0,9;
HMAX – максимальная высота подъема, м;
h – путь, проходимый кабиной при разгоне до номинальной скорости и торможении от номинальной скорости до остановки;
N ПВ – число вероятных остановок при подъеме,
|
|
|
|
|
|
N1 1 |
g П ЕЛ |
|
|
|
N ПВ |
N1 |
N1 |
|
|
|
|
|
|
|
|||
|
|
|
N1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.31) |
где N1 – число возможных остановок кабины выше |
|||||||
посадочного этажа; |
|
|
|
|
|||
g П |
0.8– коэффициент заполнения кабины при |
||||||
подъеме, |
|
|
|
|
|
|
|
ЕЛ |
GГ |
800 |
- вместимость лифта, определяемая |
||||
|
|||||||
|
|
|
|
|
|
|
|
его грузоподъемностью GГ и среднем весом |
|||||||
человека, Н; |
|
|
|
|
|
|
|
N СВ – число вероятных остановок при спуске; |
|||||||
|
|
|
|
N2 |
1 |
g П ЕЛ |
|
|
|
|
NCВ N2 |
N2 |
|
|
, |
(2.32) |
|||
|
|
|
|
|
|
||||
|
|
|
N2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
где N2 – число возможных остановок кабины ниже |
|||||||||
посадочного этажа; |
|
|
|
|
|
|
|
|
|
gC |
0.4 - коэффициент заполнения кабины при |
||||||||
спуске; |
|
|
|
|
|
|
|
|
|
t1 – время на ускорение и замедление лифта; |
|||||||||
t2 – время, затрачиваемое на пуск лифта; |
|
||||||||
t3 – время открытия и закрытия дверей; |
|
||||||||
t П 4 |
t П 5 - время, затрачиваемое на вход и выход |
||||||||
пассажиров при подъеме, с; |
|
|
|
|
|
||||
|
tП 4 |
tП 5 |
2 |
t |
g П ЕЛ , |
|
(2.33) |
||
t - время, затрачиваемое на вход и выход |
|||||||||
одного пассажира; |
|
|
|
|
|
|
|
|
|
tC 4 |
tC 5 - время, затрачиваемое на вход и выход |
||||||||
пассажиров при спуске, с; |
|
|
|
|
|
|
|
||
|
tC 4 |
tC 5 |
2 |
t |
gC ЕЛ , |
|
(2.34) |
||
Кt – коэффициент, учитывающий дополнительные задержки (вход и выход инвалидов, погрузка и выгрузка колясок с детьми и прочее), для жилых зданий Кt=1,1.
Время работы привода пассажирского лифта составляет

tB |
2 H B h NПВ |
NСВ |
1 |
NПВ |
NСВ 1 t1 t2 . |
V |
|
|
|||
|
|
|
|
|
(2.35)
Далее определим продолжительность включения двигателя пассажирского лифта
ПВ |
100 tB |
, %. |
(2.36) |
|
|||
|
TK |
|
|
Зададим цикл лифта следующим образом. Примем в качестве посадочного седьмой этаж. Согласно расчетам N ПВ и N СВ кабина опускается с седьмого этажа на четвертый, с четвертого опускается до первого, затем поднимается на пятый, после этого на девятый и завершает цикл на седьмом этаже.
Такой цикл работы лифта (рис. 2.26) выбран из условия максимально допустимой нагрузки на двигателе при посадочном этаже n=7.
Рис. 2.26. Круговой рейс лифта
Расчет предварительной мощности электропривода
Мощность двигателя (Вт) механизма подъема в установившемся режиме определяется формулой
/15/
Pд |
(1 a у ) GГ |
V |
, |
(2.37) |
|
|
|||
где |
ау=0,4…0,6 – |
коэффициент |
||
уравновешивания; |
|
|
|
|
GГ=mГ*g – вес груза, Н; mГ – масса груза, кг;
V – скорость движения кабины, м/с; =0,5…0,6 – общий КПД для реальных
подъемно-транспортных машин. |
|
|
Вес противовеса GПР |
находят из условия |
|
полного уравновешивания кабины GК |
и частичного |
|
уравновешивания груза GГ |
|
|
GПР GК ау |
GГ . |
(2.38) |
Если рассчитанное выше значения продолжительности включения (ПВ) не совпадает со стандартным значением, то производится перерасчет мощности (кВт) с учетом ближайшего стандартного значения ПВСТ
P |
P |
ПВ |
. |
(2.39) |
|
||||
P |
Д |
ПВСТ |
|
|
|
|
|
||
Далее выбирается лифтовый двигатель со стандартной продолжительностью включения
ПВСТ при соблюдении условия Рн Рр , который проверяют по нагреву.
Проверка двигателя по нагреву
Примем допущение, что при подъеме и спуске скорость вращения вала двигателя мало отличается. Это можно объяснить тем, что при подъеме и спуске статические моменты, хотя и отличаются друг от друга, но на рабочем участке механической характеристики двигателя скорость изменяется в небольших пределах.
Статическая мощность (Вт) механизма при прямом направлении энергии (подъем кабины) рассчитывается по формуле
P 1 ay  GГ DШ n , (2.39)
GГ DШ n , (2.39)
C.П. |
2 iP |
|
где ay 0.4 0.6 - коэффициент уравновешивания, GГ –вес груза, Н;
DШ –диаметр канатоведущего шкива, м; wn –номинальная скорость двигателя, с-1;
- КПД механизма;
ip – передаточное число редуктора. Статическая мощность механизма при
обратном направлении энергии (спуск кабины) рассчитывается по формуле
PC.C. |
1 ay Gg DШ |
n |
. |
(2.40) |
2 iP |
|
|||
|
|
|
|
Время движения кабины на каждом этаже кругового рейса можно рассчитать по формуле
|
|
|
|
|
|
t tP tT ty , |
(2.41) |
|
где tP |
|
V |
|
– время разгона, с; |
|
|||
|
|
|
|
|||||
|
|
|
|
|||||
|
|
aMAX |
|
|
|
|||
tT |
tT 1 tT 2 |
|
tT 3 - время торможения, с; |
|
||||
где |
tT1 |
|
V |
|
VПОС |
|
– время перехода с номинальной |
|
|
|
aMAX |
|
|||||
|
|
|
|
|
|
|
||
скорости на посадочную, посадочную скорость VПОС определяют по рис. 2.13 в зависимости от заданной точности остановки лифта;
tT 2 – время подхода к этажу на посадочной скорости,
|
tT 3 |
|
|
VПОС |
|
|
– время торможения от Vпос |
до |
||||||
|
|
|
aMAX |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
полной остановки, |
|
|
|
|
|
|
||||||||
|
t y |
|
n2 n1 |
|
|
ЭТ |
|
SPT |
– |
время движения |
на |
|||
|
|
|
|
|
|
V |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
установившейся скорости, с, |
|
|
||||||||||||
где n1, n2 – порядковые номера этажей; |
|
|||||||||||||
|
ЭТ – межэтажное расстояние, м; |
|
||||||||||||
|
SPT |
|
SP |
ST 1 |
ST 2 |
|
ST 3 |
- путь, проходимый |
||||||
кабиной при разгоне и торможении, м; |
|
|||||||||||||
где |
S |
P |
0.5 |
a |
MAX |
t |
2 |
- путь разгона, м; |
|
|||||
|
|
|
|
|
|
|
P |
|
|
|
|
|||
|
S |
|
|
0.5 a |
MAX |
t |
2 |
- путь торможения от V до |
||||||
|
T1 |
|
|
|
|
|
T1 |
|
|
|
|
|||
Vпос, м;
ST 2 VПОС  tT 2 2 - путь подхода к этажу на посадочной скорости, м;
tT 2 2 - путь подхода к этажу на посадочной скорости, м;
ST 3 0.5  aMAX
aMAX  tT 32 - путь торможения от Vпос до остановки, м.
tT 32 - путь торможения от Vпос до остановки, м.
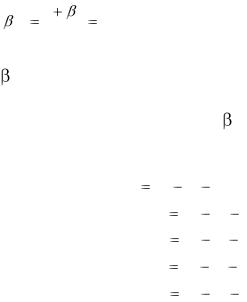
Рассчитаем время движения для отдельных этапов цикла работы лифта. По выполненным ранее расчетам при посадочном этаже n= 7, числе вероятных остановок на спуске NCB и на подъеме NПВ круговой рейс лифта (условно) будет состоять из спуска с седьмого этажа на четвертый (t74), далее
счетвертого на первый (t41), подъема с первого на пятый (t15), затем с пятого на девятый (t59) и спуска
сдевятого на седьмой (t97). Нагрузочная диаграмма лифта приведена на рис. 2.27.
Рассчитаем эквивалентную мощность
PЭ |
|
P 2 |
t |
t |
|
P 2 |
t |
|
t |
|
t |
|
, |
|
СП |
15 |
|
59 |
CC |
|
74 |
|
41 |
|
97 |
||
|
|
|
|
|
|
|
|||||||
|
4 tP |
УТ |
4 tT |
|
УТ |
t15 y |
t59 y |
t74 y |
|
t41y t97 y |
|
||
(2.42)
Рис. 2.27. График нагрузочной диаграммы лифта
В формуле (2.42) введены обозначения:
|
1 |
0 |
- коэффициент ухудшения |
|
|
|
|
||
|
|
|
|
|
УТ |
|
|
2 |
|
|
|
|
|
|
теплоотдачи при пуске и торможении; 0 - коэффициент ухудшения теплоотдачи при
неподвижном роторе, для двигателя закрытого исполнения с самовентиляцией 0=0,45…0,55;
t97y, t74y, t41y, t15y, t59y – время установившегося движения, с;
t97 y |
t97 |
tP |
tT ; |
|
|
t74 y |
t74 |
tP |
tT ; |
|
t41y |
t41 |
tP |
tT ; |
|
t15 y |
t15 |
tP |
tT ; |
|
t59 y |
t59 |
tP |
tT . |
Подставим полученные значения времени и коэффициент ухудшения теплоотдачи в формулу и рассчитаем РЭ .
Если выбранный двигатель имеет номинальную мощность РН большую по сравнению с эквивалентной мощностью РЭ, то двигатель проходит по нагреву.
2. ПОДЪЕМНО-ТРАНСПОРТНЫЕ УСТРОЙСТВА
Развитие отдельных отраслей народного хозяйства во многом зависит от уровня механизации тяжелых и трудоемких работ и степени автоматизации производственных процессов. Среди всех механизмов, участвующих в производственном процессе, большая роль отводится подъемным и транспортным машинам. С их помощью перемещаются грузы в вертикальном и горизонтальном направлениях. Эти машины
являются связующим звеном между отдельными производственными объектами, механизмами и технологическими процессами. Широкое внедрение комплексной механизации и автоматизации производственных процессов, неуклонное сокращение во всех отраслях численности работников, занятых ручным трудом, особенно на вспомогательных и подсобных работах, являются одной из важных задач народного хозяйства.
Подавляющее большинство грузоподъемных машин, изготовляемых отечественной промышленностью, имеет электрический привод механизмов, поэтому эффективность действия и производительность этих машин в значительной степени зависят от качественных показателей используемого кранового электрооборудования.
2.1. Электроприводы мостовых кранов
Общие сведения
В соответствии с классификацией подъемно- транспорт-ных машин мостовые краны относятся к устройствам комбинированного перемещения грузов.
Подъемный кран  это машина для захватывания, подъема и перемещения в горизонтальном направлении штучных и массовых грузов на сравнительно небольшие расстояния в пре-делах цеха или склада. Подъемные краны составляют особую группу грузоподъемных машин, характеризующуюся повторно-кратковременным режимом работы.
это машина для захватывания, подъема и перемещения в горизонтальном направлении штучных и массовых грузов на сравнительно небольшие расстояния в пре-делах цеха или склада. Подъемные краны составляют особую группу грузоподъемных машин, характеризующуюся повторно-кратковременным режимом работы.
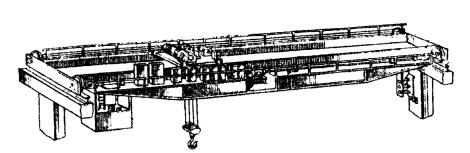
Мостовые подъемные краны (рис. 2.1) состоят из моста, перекрывающего весь пролет цеха, и грузовой тележки с механизмом подъема и передвижения. Мост передвигается по крановым рельсам, установленным на подкрановых балках цеховых зданий, а грузовая тележка – по рельсам моста крана.
Рис. 2.1. Внешний вид мостового крана
Стальная конструкция крана опирается на ходовые тележки и с помощью механизма передвижения может перемещаться по подкрановым путям. Вдоль моста проложены рельсы, по которым перемещается тележка с установленными на ней механизмом передвижения и подъемной лебедкой, осуществляющей подъем и спуск грузов. Таким образом, основными механизмами мостового крана являются механизм передвижения моста, механизм перемещения тележки и подъемная лебедка, которые снабжаются индивидуальным электроприводом (ЭП).
Краны этого типа обслуживают всю площадь цеха или склада и могут перемещать грузы в любом направлении соответственно технологическому процессу. Питание моста и тележки крана электроэнергией производится от токоподводящих троллеев. Управление осуществляется с помощью контроллеров и командоконтроллеров из кабины, размещенной на мосту или раме грузовой тележки /14/.
Массовость применения и весьма тяжелые условия работы электроприводов крановых механизмов определяют весьма жесткие требования в отношении простоты их эксплуатации и высокой надежности работы. Поэтому при проектировании крановых электроприводов стремятся к использованию максимально простых систем электропривода и их схем управления. Главным технологическим требованием, влияющим на выбор системы электропривода, является требование регулирования скорости. Требуемый диапазон регулирования скорости D определяется отношением рабочей скорости к минимальной, необходимой по условиям работы. Минимальная скорость для механизмов подъема ограничивается условиями точной установки груза в назначенное место без недопустимого толчка. Условия посадки грузов и необходимая точность их позиционирования определяются назначением крана. Для монтажных кранов, выполняющих точные операции, для кранов, транспортирующих хрупкие детали, и в других аналогичных случаях требуется при прочих равных условиях меньшее значение скорости, чем для кранов универсального назначения. Поэтому требуемый диапазон регулирования выше у специальных кранов и возрастает при увеличении рабочей скорости механизма.
Управление скоростью электропривода осуществляется при ограничениях, наложенных на ускорение, ток и момент. Рабочие скорости основных механизмов большинства кранов таковы, что при нормированных допустимых средних ускорениях суммарное время