

3535
.pdfРис. 2.13. Зависимости точности остановки кабины от
скорости и ускорения:
1–аm a x =1 м/ с2 ; 2 –аm a x =2 м/с2 ; 3– аm a x =3
м/с2 ;
Неточная остановка влечет за собой в пассажирских подъемниках увеличения времени входа и выхода пассажиров, то есть недостаточная точность остановки ухудшает эксплуатационные качества подъемных машин, снижает безопасность пользования ими и их производительность.
Низкая рабочая скорость тихоходных лифтов (до 0.5 м/с) позволяет обеспечить необходимую
точность остановки простейшим способом: отключением двигателя от сети и наложением механического тормоза. Эти установки эксплуатируются в условиях малой высоты подъема и небольшой
интенсивности работы. Отмеченные особенности допускают применение простейшего и надежного вида привода с асинхронным двигателем с короткозамкнутым ротором. Для привода тихоходных грузовых лифтов, отличающихся большей грузоподъемностью, а также тихоходных лифтов с большой частотой включений в час применяются асинхронные двигатели с фазным ротором. Реостатный способ пуска таких двигателей позволяет значительно снизить пусковые токи и облегчить работу питающей сети.
Для быстроходных лифтов (скорость движения кабины до 1.5 м/с) точность остановки уже не обеспечивается простым отключением двигателя от сети и наложением тормоза. Для таких лифтов требуется регулируемый электропривод, позволяющий получить пониженную скорость перед остановкой. В электроприводе быстроходных пассажирских лифтов получили распространение системы, в которых используются специализированные лифтовые двухскоростные асинхронные электродвигатели с короткозамкнутым ротором, обладающие повышенным скольжением и повышенной кратностью пускового момента (Мп/Мном=2.2÷2.8). В качестве примера ниже приведены таблица с
техническими характеристиками и графики с механическими и электромеханическими характеристиками лифтовых двухскоростных асинхронных электродвигателей.
Указанные двигатели имеют на статоре две независимые обмотки. Рабочая скорость движения кабины лифта обеспечивается обмоткой большой скорости с малым числом полюсов. При подходе кабины к этажу остановки эта обмотка отключается от сети, и подключается обмотка малой скорости с большим числом пар полюсов. Двигатель переходит на пониженную скорость дотягивания до уровня точной остановки, при достижении которого по сигналу датчика точной остановки отключается от сети и накладывается механический тормоз.
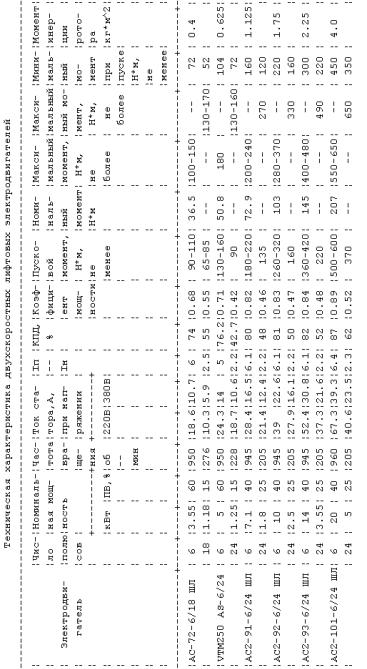
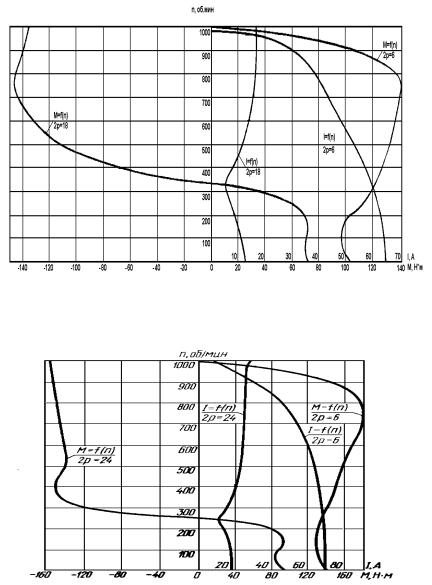
Рис.2.14. Механические характеристики двигателя АС2-72-6/18ШЛ, Р=3.55 кВт
Рис.2.15. Механические характеристики двигателя
VTM250 AS-6/24, Р=5.0 кВт
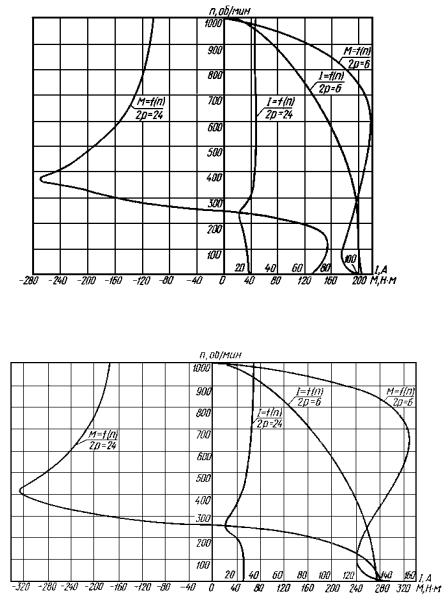
Рис.2.16. Механические характеристики двигателя
AC2-91-6/24 ШЛ, Р=7.0 кВт
Рис.2.17. Механические характеристики двигателя
AC2-92-6/24 ШЛ, Р=10 кВт

Рис.2.18. Механические характеристики двигателя
AC2-93-6/24 ШЛ; Р=14 кВт
Рис.2.19. Механические характеристики двигателя
AC2-101-6/24 ШЛ; Р=20 кВт
Кинематическая схема
Кинематика лифта, место расположения двигателя, необходимость использования противовеса и его взаимное расположение с кабиной определяется строительными особенностями зданий и специальными требованиями, предъявляемыми к лифтам.
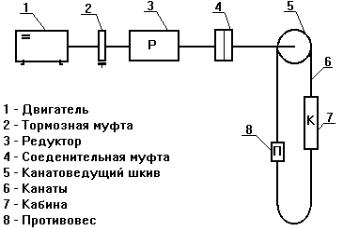
В лифтах преимущественно применяются только кинематические схемы с верхним расположением привода. При этом размещении уменьшается число перегибов канатов, что увеличивает их долговечность, повышает КПД установки, уменьшает нагрузки от лифта на опорные конструкции шахт и снижает стоимость лифта. Кинематическая схема приведена на рис. 2.20. Движение от двигателя 1 через тормозную муфту 2, редуктор 3, соединительную муфту 4 передается на канатоведущий шкив 5, который с помощью канатов 6 приводит в движение кабину 7 и противовес 8.
Рис. 2.20. Кинематическая схема лифта
Устройство лифтовой лебедки и входящих составляющих представлено на рис. 2.21.
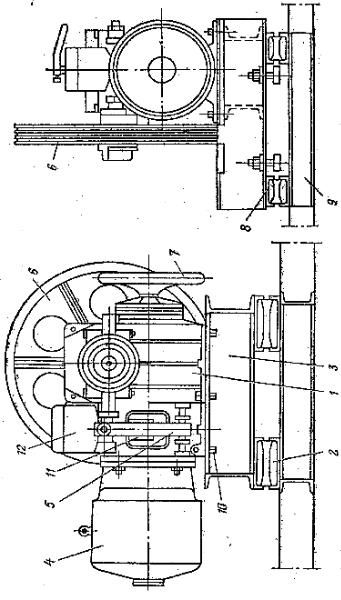
Рис. 2.21. Лифтовая лебедка с канатоведущим шкивом