

3535
.pdfпереходных процессов составляет небольшую долю общего времени цикла. При этом условия регулирования момента и соответствующий характер переходных процессов на производительность крана существенного влияния не оказывают, а точного воспроизведения законов движения обычно не требуется.
Требования к электроприводам
1. Обеспечение возможности пуска, реверсирования и останова механизма с заданным классом точности. Соответствующие этим классам погрешности и относительные жесткости механической характеристики, приведены в табл.2.1.
|
|
|
|
Таблица 2.1 |
|
Класс |
1 |
2 |
3 |
4 |
|
точности |
|||||
|
|
|
|
||
Погрешность, |
2…3 |
5…10 |
25…50 |
100… |
|
мм |
200 |
||||
|
|
|
|||
Относитель- |
|
|
|
|
|
ная жесткость |
выше 20 |
10…20 |
7…10 |
4…7 |
|
МХ |
|
|
|
|
|
|
|
|
|
|
Под относительной жесткостью механической характеристики понимают отношение приращения момента к соответствующему приращению скорости, когда эти величины выражены в относительных единицах. В частном случае это может быть 1/Sн.
2.Развиваемый момент двигателя должен быть таков, чтобы имелась полная возможность обеспечения работы механизма с требуемой интенсивностью движения.
3.При заданных скоростях и числе включений в час
Nвк не должно быть перегрева обмоток, из-за которого возможен длительный останов.
4.Двигатель должен быть выбран в соответствии с условиями эксплуатации.
5.Приводной двигатель должен обладать
наименьшими маховыми массами, оказывающими
существенное влияние на протекание переходных процессов.
6.Приводной двигатель по мощности должен соответствовать мощности механизма мостового крана, обладать необходимой перегрузочной способностью.
7.Номинальное напряжение на обмотке статора двигателя должно соответствовать напряжению питания сети.
8.Конструктивно двигатели должны быть выполнены с учетом безопасности и удобства обслуживания.
2.2. Электропривод тележки мостового крана
Общие сведения
Тележка мостового крана является самостоятельным эле-ментом подъемно-транспортного устройства и предназначена для перемещения грузов в пределах пролета мостового крана с технологически заданной скоростью движения и требуемой точностью позиционирования груза.
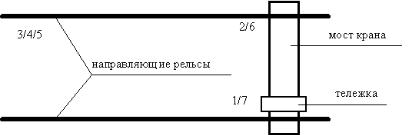
Привод тележки является одним из основных узлов оборудования мостового крана. Тележка перемещается по колее мостового крана. Сам же мост перемещается в направлении, перпендикулярном направлению движения тележки. На тележке установлен подъемный механизм (ПМ), который оборудован крюком (или электромагнитом), с помощью которого можно перемещать груз.
Движение тележки является составной частью технологического цикла мостового крана (рис. 2.2).
Рис. 2.2. Схема выполнения операций мостовым краном в рабочем цикле
Этот цикл состоит из следующих операций (на рис. 2.2 номера операций показаны цифрами):
1)подъем груза;
2)перемещение тележки в заданное положение;
3)перемещение крана в заданное положение;
4)опускание груза;
5)подъем крюка;
6)перемещение крана в исходное положение;
7)перемещение тележки в исходное положение;
8)опускание крюка;
Как видно из технологического цикла мостового крана, двигатель привода тележки включается во второй и седьмой операциях.
При подходе тележки к заданному положению в пролете мостового крана осуществляется электрическое торможение электродвигателя привода тележки для обеспечения необходимой точности остановки. После чего двигатель отключается и накладывается механический тормоз. Далее включается электропривод передвижения моста, и груз перемещается вдоль цеха согласно технологическому заданию. Достигнув указанного места, кран останавливается, опускается груз, и далее выполняются операции согласно технологическому циклу.
Кинематическая схема
Кинематическая схема механизма передвижения тележки мостового крана представлена на рис. 2.3.
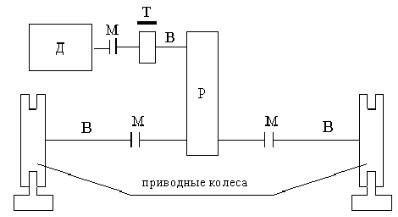
Рис. 2.3. Кинематическая схема механизма передвижения тележки
Механизм передвижения тележки выполнен по схеме с редуктором посредине между приводными колесами. Движение от электродвигателя Д, через тормозной шкив Т, редуктор Р, соединительные муфты М и валы В передается на ходовые колеса. Для удержания тележки в неподвижном состоянии используется тормозной шкив. Тележка имеет четыре ходовых колеса. Число приводных колес равно двум. Ходовые колеса крановых тележек нормально изготавливаются двухреберными. Механизм передвижения тележки выполнен по схеме с редуктором посредине между приводными колесами. Движение от электродвигателя Д, через тормозной шкив Т, редуктор Р, соединительные муфты М и валы В передается на ходовые колеса. Для удержания тележки в неподвижном состоянии используется тормозной шкив. Тележка имеет четыре ходовых колеса. Число приводных колес равно двум. Ходовые колеса крановых тележек изготавливаются двухреберными.
Нагрузочная диаграмма и тахограмма механизма передвижения тележки
Для расчета тахограммы v=f(t) определим продолжительность операций на основании технологического цикла.
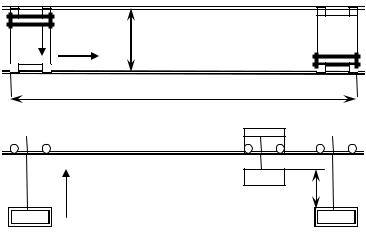
Схематичное изображение мостового крана приведено на рис. 2.4.
Длительности отдельных операций технологического цикла
Время подъема груза t1,с
t1=s1/v1, |
(2.1) |
где s1- высота подъема, м; v1- скорость подъема, м/с. Время перемещения тележки в заданное положение t2
будет определяться с учетом времени разгона и торможения тележки с требуемым ускорением 'a'. Исходя из условий технологического процесса, тахограмма при перемещении тележки должна иметь вид, показанный на рис. 2.5. Необходимо обеспечить плавный пуск механизма тележки до заданной скорости с требуемым ускорением.
|
|
|
|
|
|
|
V2 |
|
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V3 |
|
|
|
S3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V1 |
|
S1 |
|
Рис. 2.4. Схематичное изображение мостового крана
Для обеспечения требуемой точности позиционирования необходимо плавное замедление электропривода с переходом на пониженную скорость v2п, затем производить остановку тележки (рис.2.5).
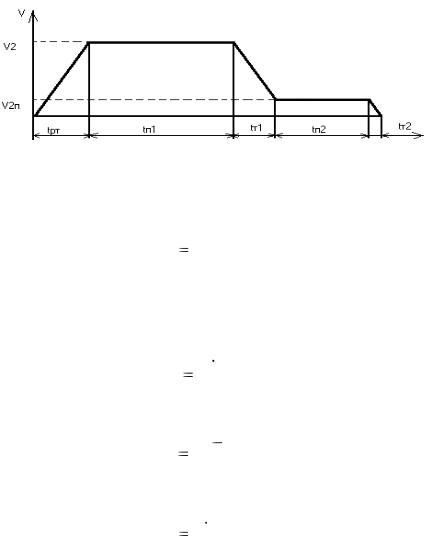
Рис. 2.5. Тахограмма механизма передвижения тележки
Время разгона тележки до скорости v2
tрт |
v2 |
, |
(2.1) |
|
a |
||||
|
|
|
где v2-заданная скорость передвижения тележки, м/с; a-допустимое ускорение, м/с2.
Расстояние, пройденное за время разгона тележки
|
|
|
|
2 |
|
|
|
|
sрт |
|
a |
t рт |
. |
(2.2) |
|||
|
|
2 |
|
|||||
|
|
|
|
|
|
|
|
|
Время торможения тележки до скорости v2п |
|
|||||||
tт1 |
v2 |
v2п |
. |
(2.3) |
||||
|
|
|
|
|||||
|
|
|
|
a |
|
|
|
|
Расстояние, пройденное за время tm1 |
|
|||||||
s |
|
a |
tт12 |
. |
|
|
(2.4) |
|
|
|
|
|
|
|
|||
т1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Время перемещения тележки со скоростью vп2 зависит от уровня квалификации машиниста крана и в среднем принимается tп2=2 … 3 с.
За это время тележка пройдет расстояние

|
sп2 |
|
tп2 vп2 . |
|
(2.5) |
|||||||||
Время до полной остановки тележки |
|
|
||||||||||||
|
tт2 |
|
|
v2п |
. |
|
|
|
|
|
|
(2.6) |
||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
a |
|
|
|
|
|
|||||
Расстояние, пройденное тележкой со скоростью v2 |
||||||||||||||
sп1 |
s2 sрт |
sт1 |
|
sт2 |
sп2 , |
|
||||||||
где s2 - пролет крана, м; |
sт2 - расстояние, |
пройденное за |
||||||||||||
время tт2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||
|
sт2 |
|
a |
tт2 |
. |
|
|
(2.7) |
||||||
|
|
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Время перемещения тележки со скоростью v2 |
|
|||||||||||||
|
|
|
|
tп1 |
|
sп1 |
. |
|
(2.8) |
|||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
Время перемещения тележки мостового крана |
|
|||||||||||||
t2 |
tрт |
tп1 |
|
tп2 |
|
tт1 tт2 . |
(2.9) |
|||||||
Время перемещения крана в заданное |
положение |
|||||||||||||
|
|
t3 |
|
s3 |
. |
|
(2.10) |
|||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
v3 |
|
|
|
|
|
|||
где s3-длина перемещения крана, м; v3-скорость перемещения крана, м/с. Время опускания груза t4=t1.
Время подъема крюка с неполным грузом t5=t1.
Время перемещения крана в исходное положение t6=t3. Время перемещения тележки в исходное положение
t7=t2.

Время опускания крюка с неполным грузом t8=t1. Длительность всего цикла
tц  ti
ti
Расчетная продолжительность включения
ПВр= |
t |
р |
100 % . |
(2.11) |
|
|
|
||||
tц |
|||||
|
|
|
|||
где tр - время работы механизма передвижения тележки, с;
tц– время цикла, с. |
|
|
|
|
|
|
|
|
tр=t2+t7. |
|
|
||||
Число включений в час |
|
|
|
|
|
||
Nвк |
|
3600 |
2 . |
|
(2.12) |
||
tц |
|
||||||
|
|
|
|
|
|
|
|
Угловая скорость вращения колеса тележки |
крана на |
||||||
рабочей скорости передвижения |
|
|
|||||
|
|
|
|
v2 |
|
, |
(2.13) |
|
|
к |
|
Rк |
|||
|
|
|
|
|
|||
|
|
|
|
|
|
||
где Rк - радиус колеса, м.
Тоже, но на пониженной скорости передвижения
|
v2п |
. |
(2.14) |
кп |
Rк |
||
|
|
|
|
Тахограмма механизма |
передвижения |
тележки |
|
крана совместно с нагрузочной диаграммой, расчѐт которой приведѐн выше, представлена на рис. 2.6.
Произведем расчет нагрузочной диаграммы М=f(t) механизма передвижения тележки. Для этого необходимо предварительно определить коэффициент полезного действия (КПД) редуктора. Для закрытой цилиндрической передачи с жидкой смазкой КПД пары зубчатых колес на подшипниках качения составляет 0,97-0,99, аналогично для конической передачи КПД равен 0,96-0,98.
Статический момент для механизмов передвижения, работающих на горизонтальном пути в производственном помещении, создается силами трения скольжения в подшипниках и трения качения колес тележки, катящихся по рельсам мостового крана. Величину статического момента механизма определяют по формуле /15/
|
|
M с |
(Gгр |
Gт ) ( |
rу |
|
f ) к р |
, |
(2.11) |
|
|
|
|
|
|
|
|
|
|||
где |
Мс – статический момент, H м; |
|
|
|
|
|||||
|
Gгр – вес груза, Н; |
|
|
|
|
|
|
|
||
|
Gт |
– вес тележки, Н; |
|
|
|
|
|
|
||
|
– коэффициент трения скольжения, =0.1 ; |
|
||||||||
|
rу – радиус цапфы колеса; |
|
|
|
|
|
|
|||
|
f – коэффициент трения качения ходовых колес, |
|||||||||
значение |
коэффициента f |
выбираем |
по |
приложению 3 в |
||||||
зависимости от диаметра колеса и типа рельса; |
|
|
||||||||
|
Кр |
– коэффициент, |
учитывающий |
трение |
реборд |
|||||
колес |
о |
рельсы, |
возникающее |
вследствие |
перекоса |
|||||
конструкции. При |
индивидуальном |
приводе |
Кр |
=2.5 |
||||||
(приложение 3); |
|
|
|
|
|
|
|
|
||
– КПД передачи. Определим вес тележки
Gт mт g,
где mт – масса тележки, кг;
g=9.8 – ускорение свободного падения, м/с2. Статический момент механизма при прямом ходе
тележки определяется грузоподъѐмностью крана. Статический момент механизма при обратном ходе
тележки рассчитывается для неполного груза.
Нагрузочная диаграмма механизма перемещения тележки крана приведена на рис. 2.6.
Требования к электроприводу механизма передвижения
Движение тележки с ударами по металлоконструкции на стыках рельсов, интенсивные разгоны и торможения, собственные колебания металлоконструкций при нагружении машин вызывают весьма интенсивные механические воздействия на электрооборудование, располагаемое на тележке мостового крана. Исходя из этого, электропривод (ЭП) перемещения тележки согласно, должен удовлетворять следующим требованиям:
- обеспечение возможности пуска в ход механизма, реверсирование направления перемещения и останов механизма с требуемым ускорением a (м/с2)и надлежащей точностью позиционирования (мм);