

Проектирование электропривода промышленных механизмов. Фролов Ю.М
.pdftп = 0,667/0,3 = 2,222 с;
Sп = 0,3  2,2222 /2= 0,741 м.
2,2222 /2= 0,741 м.
tперем тел = (S2- Sп)/V2 – 2 tп ;
tперем тел = (26- 0,741/0,667) – 2 2,222 = 20,443 с.
4)Примем время на подцепление и съем груза по 30 с.
5)Продолжительность рабочего цикла составит
tц = (4 t1 + 2 t2 + 2 t3 ) + 2 30;
tц = 4 46,875 + 2 20,443 + 2 41,222+60 =370,83 с.
В табл. 2.3 приведены продолжительности операций технологического цикла мостового крана.
|
|
Таблица 2.3 |
|
Вид операции |
Продолжительность, |
Позиции на оси |
|
с |
времени |
||
|
|||
Опускание |
46,875 |
0-1 |
|
груза2 |
|||
|
|
||
Замена груза2 на |
30 |
1-2 |
|
груз1 |
|||
|
|
||
Подъем груза1 |
46,875 |
2-3 |
|
Перемещение |
41,222 |
3-4 |
|
тележки |
|
|
|
Перемещение |
20,443 |
4-5 |
|
крана |
|
|
|
Опускание |
46,875 |
5-6 |
|
груза1 |
|
|
|
Замена груза1 на |
30 |
6-7 |
|
груз2 |
|
|
|
Подъем груза2 |
46,875 |
7-8 |
|
Перемещение |
41,222 |
8-9 |
|
тележки |
|
|
|
Перемещение |
20,443 |
9-10 |
|
крана |
|
|
|
Всего |
370,83 |
0-10 |
По данным табл. 2.3 определяем продолжительность включения
ПВ = (tp/ tц) 100%; |
(2.27) |
где tp – время работы привода, tц – время рабочего цикла.
tp = 4 t1 tp = 4 46,875= 187,5 с;
t1 tp = 4 46,875= 187,5 с;
ПВ = (187,5/ 370,83) 100; ПВ = 50,6%.
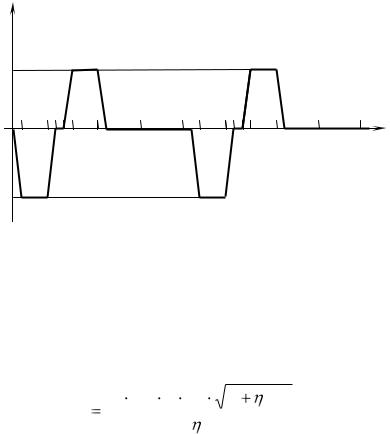
По результатам проведенных расчетов на рис. 2.10 построена тахограмма механизма подъѐма.
V, м/c
0,667
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
t, c |
|
|
|
|
|
|
|
|
|
-0,667
Рис. 2.10. Тахограмма механизма подъема
Нагрузочная диаграмма механизма подъѐма
При подъеме, спуске и посадке груза на привод будет действовать активный статический момент, обусловленный грузом.
б) для привода подъема, полагая, что время подъема и спуска примерно одинаково, расчетную мощность определяют по формуле
|
k |
з |
m |
g V |
(1 4 п ) |
|
|
Pрасч.гр.П |
|
гр |
гр |
|
; |
|
|
|
|
|
|
|
(2.28) |
п
где Kз=1.1 - коэффициент запаса; mгр - масса груза, кг; Vгр - скорость перемещения груза, м/с;
g = 9.8 м/с2 – ускорение свободного падения; ηп– КПД передачи редуктора;
По формуле (2.28) определим расчетную мощность привода при подъеме груза mгр1 (прямой ход моста) и подъѐме груза mгр2 (обратный ход моста).
Затем определим расчетную мощность привода по формуле (2.29) при спуске груза mгр на прямом и обратном ходе крана
Pрасч.гр.С |
k |
з |
m |
гр |
g V |
гр |
(1 4 |
п ) |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
п . |
(2.29) |
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
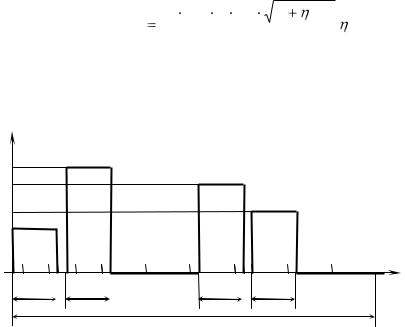
Данные табл. 2.3 и величины мощностей объединим в нагрузочной диаграмме, представленной на рис. 2.11.
Р, кВт
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
|
|
5 |
6 |
7 |
|
8 |
9 |
|
t, |
|||
to2 |
|
|
tп1 |
|
|
|
|
to1 |
|
|
tп2 |
|
|
t, |
c |
|
|
|
|
|
tц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 2.11. Нагрузочная диаграмма механизма подъѐма |
|
|
|||||||||||||
Расчет |
предварительной |
|
мощности |
электропривода |
|
|
|||||||||
подъѐма осуществляется подобно расчету предварительной мощности электропривода тележки мостового крана.
Основные критерии при предварительном выборе двигателя – это расчетная мощность и длительный момент, определяемый активным статическим моментом при подъеме.
3. РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОПРИВОДОВ КУЗНЕЧНО-ПРЕССОВЫХ УСТАНОВОК
Технологические процессы обработки давлением отличаются большими удельными усилиями сопротивления
деформированных материалов (усилиями полезного сопротивления), значительными затратами энергии, которые имеют кратковременный, так называемый пиковый характер. В связи с этим большинство кузнечноштамповочных машин (КШМ) по существу являются усилителями мощности, и в их конструкциях предусмотрены аккумуляторы, обеспечивающие возможность пикового расхода энергии, накопленной в них ранее. Различные сочетания конструкции аккумуляторов и механизмов, передающих эту энергию для преодоления полезного сопротивления, определяют многообразие КШМ.
Общеизвестен прогрессивный характер технологии кузнечно-штамповочного производства, основанный на получении заданной формы деталей или заготовок в результате рационального перераспределения металла, а не за счет удаления части его в стружку, как это происходит при его обработке резанием, кроме того, обработка металлов давлением позволяет получать изделия с повышенными механическими свойствами.
3.1. Общая классификация КШМ
Воснову классификации наряду с характером изменения скорости рабочего звена на участке рабочего хода положены принцип его работы и характер воздействия на заготовку. На этом основании выделено пять основных классов КШМ /23/.
Прессы - КШМ квазистатического воздействия на поковку, в которых преодоление полезного сопротивления осуществляется при перемещении рабочего звена - ползуна,
аусилие деформирования воспринимается замкнутой силовой несущей системой, включающей исполнительный механизм, станину и другие элементы.
Взависимости от конструкции главного исполнительного механизма и кинематики рабочего звена выделены три группы прессов: кривошипные и кулачковые
(с кинематически заданным характером изменения скорости), гидравлические и винтовые (с произвольным характером изменения скорости).
Главным параметром прессов является номинальное усилие. В качестве аккумуляторов в кривошипных и винтовых прессах применяют маховики, в гидропрессах - гидроаккумуляторы, и в гидровинтовых прессах - и маховики, и гидроаккумуляторы. Следует отметить, что по характеру изменения скорости рабочего хода винтовые прессы относятся к классу молотов, а их главным параметром наряду с номинальным усилием является эффективная кинетическая энергия, запасаемая в конце хода подвижными частями (маховиком).
Молоты - кузнечно-штамповочные машины ударного и квазиударного воздействия на поковку, в которых сопротивление деформированию преодолевается путем использования кинетической энергии, накопленной подвижными частями. Главным параметром молота является эффективная кинетическая энергия, то есть энергия, запасенная ударной массой (подвижными частями) к концу их хода. Ударная масса является аккумулятором механической энергии в молоте. Основываясь на вышеуказанных свойствах кривошипно-шатунные прессы можно отнести к классу молотов.
Ротационные машины - КШМ, в которых преодоление сопротивления деформированию происходит при вращении рабочего органа с инструментом или заготовки при непрерывном перемещении зоны контакта заготовки с инструментом. Характер воздействия инструмента на поковку - квазистатический. Главным параметром этих машин может быть номинальное усилие или номинальный крутящий момент. Поскольку технологический цикл достаточно продолжителен (как правило, включает несколько оборотов рабочего инструмента), большинство машин аккумуляторов не имеет. В машинах же с пиковым характером работы (например,
ковочных вальцах) в качестве аккумуляторов применяют маховики.
Импульсные машины и статы - это машины, в
которых преодоление сопротивления деформированию осуществляется непосредственно средой, передающей энергию. В импульсных машинах в качестве аккумулятора энергии используются непосредственно энергоносители (взрывчатое вещество, горючий газ и другие), а передающей средой служит воздух, газ, жидкость, твердое тело, непосредственно воздействующие на деформируемый материал в очень короткие промежутки времени. Главным параметром этих машин является энергия импульса. В статах воздействие осуществляется длительное время и с малыми (ползучими) скоростями, а средой, передающей энергию, является жидкость, газ и т.п. Главные параметры - давление среды, воздействующей на деформируемое тело, и площадь рабочей камеры. Аккумуляторы в этих машинах, как правило, не применяются.
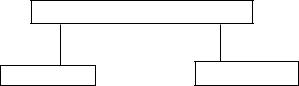
3.2. Классификация кривошипно-шатунных прессов общего назначения
На рис. 3.1 приведена классификация кривошипных прессов общего назначения или, как их еще называют, универсальных прессов. В зависимости от конструктивного оформления станины различают закрытые и открытые прессы.
Воткрытых прессах станина имеет С-образную форму, штамповое пространство имеет доступ с трех сторон
ипоэтому удобно для обслуживания. Однако несимметричное нагружение станины вызывает ее значительные деформации и возникновение перекосов штампа.
Взакрытых прессах применяют станину в виде симметричной рамы, что обеспечивает снижение
деформаций и при центральной нагрузке исключает перекосы.
К р и в о ш и п н ы е п р е с с ы о б щ е г о н а з н а ч е н и я
О т к р ы т ы е
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О д н о с т о е ч н н ы е |
|
|
Д в у х с т о е ч н ы е |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С н е п о - |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
д в и ж н ы м |
|
|
|
|
Н а к л о - |
|
|
|||||||
с т о л о м |
|
|
|
|
н я е м ы е |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
С п е р е - |
|
|
|
|
|
Н е н а к л о - |
||||
|
|
|
|
д в и ж н ы м |
|
|
|
|
|
|
н я е м ы е |
|||
|
|
|
|
с т о л о м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
З а к р ы т ы е
|
|
|
|
|
О д н о к р и - |
|
Д в у х к р и - |
||
в о ш и п н ы е |
|
в о ш и п н ы е |
||
|
|
|
|
|
|
|
|
|
|
Р а с п о л о ж е н и е |
|
Р а с п о л о ж е н и е |
||
в а л о в - п а р а л - |
|
в а л о в - п е р п е н - |
||
л е л ь н о е ф р о н т у |
|
д и к у л я р н о е к |
||
п р е с с а |
|
ф р о н т у п р е с с а |
||
|
|
|
|
|
Рис. 3.1. Классификация кривошипно-шатунных прессов общего назначения
В основе работы двух- и четырехкривошипных прессов лежат те же процессы, что и в однокривошипных прессах. Увеличение же числа кривошипных механизмов приводит к увеличению габаритных размеров штампового пространства и пресса в целом.
3.3. Области применения и устройство кривошипных прессов
На кривошипных прессах общего назначения выполняют операции вырубки и пробивки, неглубокой вытяжки, гибки и обрезки и другие технологические процессы холодной и горячей штамповки, не требующие применения специализированного оборудования. Они также

предназначены для использования в составе робототехнических комплексов.
Однокривошипные прессы предназначены для выполнения различных операций холодной штамповки: вырубки, гибки, неглубокой вытяжки, пробивки и других операций холодной штамповки, а также для обрезки облоя после горячей штамповки.
Таблица 3.1 Параметры однокривошипных прессов
Наименование |
|
Тип пресса |
|
|
параметра |
КБ2030 |
К2114 |
|
К2232 |
Номинальное усилие, тс |
100 |
2,5 |
|
160 |
Ход ползуна, мм |
25 - 130 |
4 - 30 |
|
160 |
Число ходов ползуна |
80 |
200 - 400 |
|
37 |
в минуту |
|
|
|
|
Электродвигатель: |
|
|
|
|
тип |
АС61 - 4 |
АОЛ22- 4 |
АС62 - 6 |
|
мощность, кВт |
10 |
0,4 |
|
10 |
число оборотов в минуту |
1350 |
1400 |
|
870 |
Вес пресса, т |
6,645 |
0,4 |
|
13,055 |
Примерно 90 % всего парка кривошипных машин составляют кривошипные прессы общего назначения, из них до 80 % составляют открытые прессы, как сравнительно простые и удобные в эксплуатации.
Устройство КШМ
Структура современного пресса достаточна сложна: машина насчитывает более десяти узлов и несколько сот деталей. Наряду с обычными для каждой машины узлами - двигателем, передаточными механизмами (приводом) и исполнительным механизмом в прессе имеются узлы для управления, наладки, контроля и обеспечения безопасности обслуживающего персонала, а также вспомогательные узлы,
расширяющие технологические возможности пресса или улучшающие условия работы деталей других ответственных узлов.
В кривошипных машинах (прессах) рабочий орган - ползун перемещает обрабатывающий инструмент - штамп. Ведомым звеном исполнительного механизма является ползун, а начальным, ведущим звеном - кривошип (в редких случаях кулачок).
Исполнительный механизм, преобразующий вращательное движение кривошипа в возвратно- поступательное движение ползуна, состоит из одного или нескольких звеньев, связанных вращательными или поступательными кинематическими парами.
Привод пресса - одноступенчатый от электродвигателя через клиноременную передачу, на маховик, находящийся на эксцентриковом валу. Муфта - фрикционная однодисковая с пневматическим включением, сблокированная с ленточным тормозом.
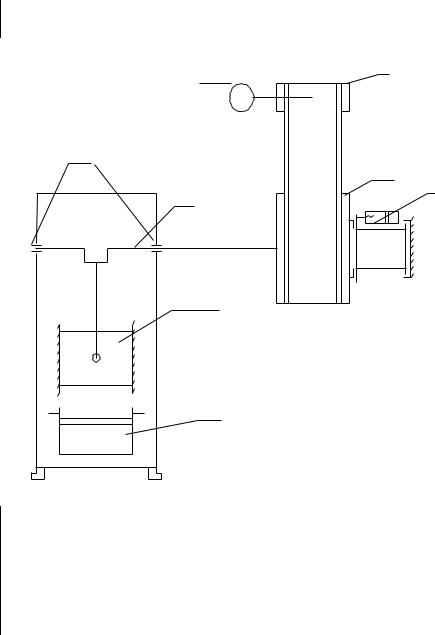
На рис. 3.2 показана упрощенная кинематическая схема однокривошипного пресса КБ2030.
Электрический двигатель 1 вращает шкив 2 клиноременной передачи. Далее вращение передается на маховик 3, посаженный на эксцентриковый вал 4. С эксцентриковым валом соединен ползун 5, посредством шатуна 8. Для уменьшения трения вал закреплен в подшипниках 7.
3.4. Технологический процесс и установки прессования
Прессование - это один из способов обработки металлов давлением, заключающийся в выдавливании металла из замкнутой области приемника (контейнера) через отверстие матрицы, соответствующее сечению выдавливаемого профиля.
Заготовка 2 (рис. 3.3а или 3.3б), в холодном или горячем состоянии, помещенная в контейнер 1,
выдавливается пуансоном 4 через отверстие матрицы 3, образуя изделие 5. Исходной
2
1 x
7
3
9
4
5
6
Рис. 3.2. Упрощенная кинематическая схема однокривошипного пресса КБ2030:
1 - электродвигатель; 2 - шкив; 3 - маховик; 4 - вал эксцентриковый; 5 - ползун; 6 - пневматическая подушка; 7 - подшипник; 8 - шатун; 9 - муфта.