Не изменяя |
дисбаланса |
пробной массы, развернём её |
на 180° |
и произведём второй пробный пуск. Амплитуда A3 пропорциональна дис- |
балансу D3 (см. рис. 11.8): |
|
|
|
|
A3 = kω 1D3 , |
(11.38) |
где |
|
D3 = D1 + Dn . |
(11.39) |
Из полученных двух параллелограммов (см. рис. 11.8) левый нало- |
жим на правый (положение дисбаланса D3 изображено штриховой лини- |
ей). Используя свойства параллелограмма, установим |
|
|
D22 + D32 = 2 (Dn2 + D12 ) , |
(11.40) |
откуда |
Dn = |
(D22 + D32 − 2D12 ) 2 . |
(11.41) |
Умножим обе части этого уравнения на kω1 и на основании пропорциональности амплитуд и дисбалансов найдём значение масштабного коэффициента дисбалансов:
kω = |
A2 |
+ A2 |
− 2 A2 |
|
2 |
3 |
1 |
. |
(11.42) |
|
|
|
1 |
mn en |
2 |
|
|
|
|
|
Далее определим модуль искомого дисбаланса D1:
Для балансировки ротора в контролируемой плоскости коррекции следует в этой области поставить дисбаланс DK1 = −D1 . Задаваясь корректирующей массой mK1, определяем её эксцентриситет:
eK1 = DK1 . mK1
Значение угла α1 между эквивалентным дисбалансом и дисбалансом пробной массы Dn находим по теореме косинусов (см. рис. 11.8):
D2 |
= D2 |
+ D2 |
− 2D D cos α |
1 |
, |
3 |
n |
|
1 |
|
n |
1 |
|
|
откуда |
cos α |
1= |
D2 |
− D2 − D2 |
|
(11.44) |
|
3 |
n |
1 |
|
|
|
|
|
|
|
|
|
2Dn D1
или через амплитуды |
cos α = |
A32 − An2 − A12 |
. |
|
(11.45) |
|
|
|
1 |
|
2 An A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Амплитуда от дисбаланса пробной массы найдется из выражения |
|
|
An = kω 1Dn . |
|
|
|
(11.46) |
С помощью обратной тригонометрической функции вычисляем зна- |
чение угла: |
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
|
|
α |
1− arccos − |
A3 |
− An − |
A1 |
. |
(11.47) |
|
2 An A1 |
|
|
|
|
|
|
|
|
|
|
Величина косинуса определяет два значения угла α1. Дисбаланс |
D1 |
может составить угол + α1 с осью x или – α1 (положение дисбаланса D1 |
на |
рис. 11.8 показано штриховой линией). Поэтому корректирующую массу надо поставить под углом ϕ k1 = α 1+ 180° либо под углом ϕ k1 = −α 1− 180° .
Кроме того, первоначально мы предположили, что дисбаланс D1 находится в первой четверти круга. Может случиться и так, что дисбалансы
D , |
D |
и D′ , D′ |
взаимно поменяются местами. Тогда в первом случае |
1 |
K1 |
1 |
K1 |
|
угол коррекции ϕ |
k1 = α 1 , а во втором случае ϕ k1 = −α 1 . Правильным будет |
то значение угла, при котором замеренная остаточная амплитуда минимальна.
Для балансировки ротора во второй плоскости коррекции необходимо переложить его в собственных подшипниках, т.е. поменять местами контролируемую и исключаемую плоскости, повторить процедуру.
Существуют и другие методы балансировки, излагаемые в специальной литературе.
11.6. Пример уравновешивания роторов
На валу ОО (рис. 11.9) закреплены грузы с массами m1, m2, m3 и m4. Надо найти массы противовесов mпI, и mпII, установленных в плоскостях исправления I – I и II–II на расстояниях, равных ρпII = 40 мм, от их центров масс до оси вращения вала, если массы грузов и координаты их центров масс соответственно равны m1 = 2 кг, ρ1 = 10 мм, m2 = 3 кг, ρ2 = 15 мм, m3 = 2 кг, ρ3 = 12 мм, m4 = 4 кг, ρ4 = 20 мм; расстояния между грузами l12 = l23 = l34 = 100 мм.
Рис. 11.9. Уравновешивание вращающихся масс двумя противовесами
Решение
Центры масс грузов лежат в одной плоскости, содержащей ось вращения вала ОО; поэтому векторы K1 , K2 , K3 и K4 , представляющие со-
бой дисбалансы m1ρ1, m2ρ2, m3ρ3, m4ρ4, лежат в той же плоскости. Расположим противовесы с массами mпI и mпII так, как это указано на
чертеже (см. рис. 11.9). Поскольку силы инерции грузов вместе с силами инерции противовесов должны находиться в равновесии, то величины масс противовесов mпI и mпII найдем из уравнений моментов дисбалансов относительно точек О1 и О2 (точек пересечения плоскостей исправления с осью вала ОО).
Уравнение моментов дисбалансов относительно точки О1:
m4ρ4 (l12+l23 + l34) – m3ρ3 (l12+l23) – m2ρ2 l12 – mпII ρпII (l12+l23 + l34) = 0,
откуда масса противовеса mпII (кг) будет равна
|
= |
m |
ρ |
4 |
(l + |
l |
+ |
l |
)− mρ |
(l + |
l |
23 |
−) |
mρ |
l |
= |
m |
4 |
|
12 |
|
23 |
34 |
3 3 |
12 |
|
|
2 |
2 12 |
пII |
|
|
|
|
|
|
ρ пII (l12+ l23+ l34 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 4 20 300 − 2 12 200 − 3 15 100 =
1, 225.
40 300
Уравнение моментов дисбалансов относительно точки O2:
m3ρ3 l34 + m2ρ2 (l23 + l34) – m1ρ1 (l12+l23 + l34) – mпIρпI (l12+l23 + l34) = 0,
откуда масса противовеса mпI (кг) будет равна
383
|
= |
m |
ρ |
l |
+ |
mρ |
2 |
(l + |
l −) |
mρ |
(l+ |
l+ |
l |
) |
= |
m |
3 |
3 34 |
2 |
23 |
34 |
1 1 |
12 |
23 |
34 |
|
пI |
|
|
|
|
|
|
|
ρ пI (l12+ l23+ l34 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
2 |
12 |
100 + 3 15 200 − 2 10 300 |
= 0, 36. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 300 |
|
|
|
|
|
|
Если ответ получим со знаком минус, то искомый противовес следует расположить на том же перпендикуляре к оси ОО с противоположной стороныотнее.

12. КОЭФФИЦИЕНТЫ ПОЛЕЗНОГО ДЕЙСТВИЯ МЕХАНИЗМОВ
Не вся энергия, подведенная к механизму, передается рабочим органам машины. Часть ее тратится на преодоление вредных сопротивлений, основные из которых – силы трения.
Совершенство машины (механизма) оценивается долей мощности Nпс=FV, использованной для выполнения полезной работы, т.е. для преодоления полезных сопротивлений. Количественной оценкой служит коэффициент полезного действия (КПД)
η = Nпс .
N
Если обозначить коэффициент потерь ψ = Nвс как отношение мощ-
N
ности, затраченной на преодоление вредных сопротивлений, ко всей мощности, то коэффициент полезного действия η = 1 − ψ .
12.1. Коэффициенты полезного действия рычажных механизмов
Основными потерями мощности в таких механизмах являются потери на преодоление сил трения в низших кинематических парах. Эти силы и их мощность определяют за цикл по нескольким положениям звеньев, затем находят среднюю мощность в цикле.
Для ее вычисления нужно знать кинематическую схему, коэффициенты трения в кинематических парах, реакции в кинематических парах, относительные скорости звеньев в кинематических парах.
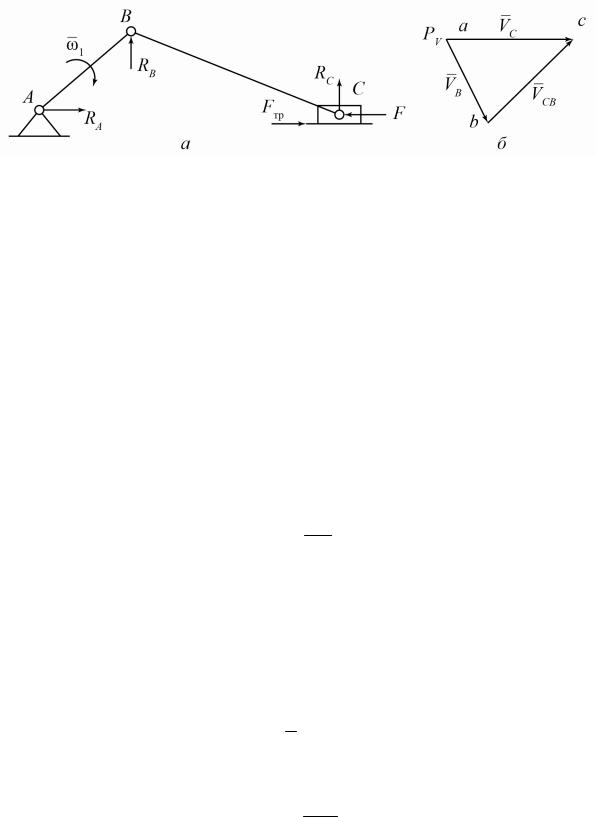
Рассмотрим, например, порядок определения КПД кривошипноползунного механизма (рис. 12.1, a). Силы трения в кинематических парах:
FA = f A RA ; FВ = fВRВ ; FС = fСRС .
Для определения относительных скоростей звеньев в кинематических парах строится план скоростей (рис. 12.1, б).
В поступательной паре С мощность силы трения
NC = fC RC vC ,
во вращательных парах
N A = f A RArAω 1 ; N B = fB RB rB ω 2 ,
где rА, rB – радиусы цапф; ω1 – известная угловая скорость кривошипа;
ω2 – |
|
относительная угловая скорость кинематической пары В; |
ω = ω |
|
+ |
|
ω |
|
BC |
|
|
|
|
|
2 |
|
1 |
|
|
|
|
Рис. 12.1. Определение КПД кривошипно-ползунного механизма:
а– схема механизма; б – план скоростей
Впоступательной паре С мощность силы трения
NC = fC RCVC ,
во вращательных парах
N A = f A RArAω 1 ; N B = fB RB rB ω 2 ,
где rА, rB – радиусы цапф; ω1 – известная угловая скорость кривошипа;
ω2 – |
|
относительная угловая скорость кинематической пары В; |
ω = ω |
|
+ |
|
ω |
|
BC |
|
. |
|
|
|
|
2 |
|
1 |
|
|
|
|
|
Угловую скорость шатуна определим по относительной скорости, которую найдем из плана скоростей:
VCB = V cb ,
ω CB= VCB ,
lBC
где l – длина шатуна.
Для каждого из k положений механизма находится мощность сил трения
Nk = NAK + NВk +NСk.
Средняя мощность за цикл работы
NC = n1 ∑ NK .
Коэффициент полезного действия механизма
η = 1− NCT ,
NСП
где NСТ – средняя мощность трения, NСП – средняя полезная мощность за цикл работы.
386

12.2. Коэффициент полезного действия зубчатого механизма. Потери на трение
Потери на трение в механизме, состоящем из двух зубчатых колес, складываются из потерь в подшипниках, в зацеплении зубьев, на разбрызгивание и размешивание масла, которые составляют главную часть потерь мощности.
Коэффициент полезного действия механизма определяют как отношение мощности, затраченной на преодоление полезных сопротивлений NПС, ко всей подведенной мощности N:
η = Nпс .
N
Коэффициент потерь мощности – отношение мощности, затраченной на преодоление вредных сопротивлений NВС, ко всей мощности,
ψ = Nвс ,
N
КПД механизма равен
η = (1− ψ ) .
Коэффициент потерь мощности в простом зубчатом механизме, состоящем из шестерни и колеса, можно представить в виде суммы коэффициентов потерь в зацеплении ψ1 на разбрызгивание и размешивание масла ψ2, на трение в подшипниках ψ3:
ψ = ψ 1 + ψ 2 + ψ 3 .
Коэффициент потерь в зацеплении цилиндрических колес
ψ 1= 2,3 f3 |
1± |
1 |
= |
2,3 f3 |
u ±1 |
. |
z2 |
|
z1 |
|
|
u |
Коэффициент потерь мощности на разбрызгивание и перемешивание дляодногоколеса, погруженноговмасломенеечемнадвойнуювысотузуба:
|
0, 75V b V |
200 |
|
|
|
|
|
|
|
l |
zc |
|
|
ψ 2= |
|
|
, |
105 F |
|
|
|
|
|
|
здесь V – окружная скорость, м/с;
b – ширина зубчатого венца, мм;
zс –кинематическая вязкость масла, сСт; zс = z1 + z2;

Для подшипников качения и подшипников скольжения при жидкостном трении ψ3 = 0,005.
При косых зубьях в формулу коэффициента потерь мощности подставляется эквивалентное число зубьев zv.
Полная величина коэффициента потерь для механизма с цилиндрическими колесами 7-го и 8-го классов точности ψ = 0,015…0,020, с коническими колесами ψ = 0,02…0,03, соответственно с колесами 6-го класса точности ψ = 0,01 и ψ = 0,02.
Потери холостого хода остаются такими же.
В многоступенчатом механизме коэффициент полезного действия равен произведению КПД ступеней, так как они соединены последовательно.
Мощность сил трения в подшипниках
NT 1 + NT 2 = MT 1ω 1+ MTω2 2 .
Мощность, затраченная на трение скольжения зубьев,
NTЗ = FTCVCK ,
где FТС – сила трения скольжения, FTC = fR12 , a R12 – сила реакции зубьев. Скорость скольжения переменна по величине и знаку
VCK = ( ω 1+ ω 2 ) Pk ,
где ω1, ω2 – угловые скорости колес; Pk – расстояние от полюса зацепления до точки касания зубьев, определяется по чертежу.
12.3. Коэффициент полезного действия системы механизмов
При последовательном соединении (рис. 12.2) мощность, подведенная к каждому из механизмов, теряется на преодоление сил вредных сопротивлений в нем. К последующему k + 1 механизму подводится мощность.
Рис. 12.2. Схема последовательного соединения механизмов
Nk = Nk −1η k .
Коэффициент полезного действия всего механизма
η = Nвых .
N
Покажем, что он равен произведению КПД всех механизмов. На самом деле
η = |
N1 |
; η |
= |
N2 |
; …; η |
= |
Nвых |
, |
|
|
1 |
N |
|
2 |
|
N1 |
n |
Nn−1 |
|
|
|
|
|
|
|
|
|
|
|
умножив их, получим |
|
|
|
|
|
|
|
|
|
|
|
η 1 η 2η 3 …η = n |
|
N1 N2 N3 … Nвых |
|
Nвых |
|
|
N N1 N2 … Nn=−1 |
|
|
, |
|
|
N |
т.е. |
|
η = η η 1η 2 3η… n . |
|
|
|
|
Чем меньше КПД механизмов, входящих в систему, и чем больше механизмов в системе, тем ниже ее КПД.
При параллельном соединении механизмов подводимая мощность распределяется по всем механизмам (рис. 12.3) и может быть представлена суммой
N = ∑ NK .
На выходе каждого механизма мощность
Nk1 = Nk η k .
Общая мощность системы на выходе
N = N η + Nη + Nη + …+ Nη .
1 1 2 2 3 3 n n
Рис. 12.3. КПД параллельно соединенных механизмов
Коэффициент полезного действия
η= ∑ Nk η k .
∑Nk

При одинаковых КПД η 1= η |
=2 …= η n |
η = |
η k ∑ Nk |
|
= η k . |
∑ Nk |
|
|
|
|
Коэффициент полезного действия системы равен коэффициентам полезного действия одного механизма.
12.4. Коэффициент полезного действия планетарного редуктора
Общие потери мощности складываются из потерь в зацеплении, в подшипниках и на разбрызгивание масла. Последние при неправильно определенном уровне масла могут быть весьма значительными. Необходимый уровень масла определяется опытным путем.
Пусть ведущее звено – подвижное центральное колесо 1, ведомое – водило.
Найдем коэффициент полезного действия редуктора, учитывая только потери в зацеплениях (рис. 12.4). По определению КПД редуктора
|
(n ) |
Nв |
|
|
NT |
|
η |
1в = |
|
|
= 1− |
|
, |
N1 |
|
N1 |
|
|
|
|
|
где N1 – мощность, подводимая к первому колесу; NТ – мощность, потерянная на трение в зацеплениях.
Рис. 12.4. Схема планетарного редуктора
Мощность на валу водила NВ = N1 – NТ. Коэффициент потерь мощности ψ = NT / N1 .
В обращенном движении планетарный редуктор превращается в ступенчатый механизм с неподвижными осями. Очевидно, потери в зацеплении при обращении механизма не изменятся.