

1505
.pdf10.4. Определить реакции RA иRB вподшипниках вала от сил инерции грузов, массы которых равны m1 = 1,0 кг, m2 = = 0,5 кг, m3 = 0,25 кг; центры масс всех грузов расположены в плоскости, содержащей ось вращения вала АВ. Координаты центров
масс S1, S2, и S3 грузов: ρ1 = 100 мм, ρ2 = 100 мм, ρ3 = 200 мм; расстояния грузов от под-
шипника А: lA1 = 100 мм, lA2 = 300 мм, lA3 = = 400 мм; расстояние между опорами А и В
L = 500 мм, угловаяскоростьвалаω= 20 с–1.
10.5. Определить массы противовесов mпI и mпII, которые надо установить в плоскостях исправления I и II для уравновешивания сил инерции грузов m1 и m2, лежащих в плоскости, содержащей ось вращения вала, если координаты центров масс SпI и SпII противовесов равны ρпI = ρпII = 100 мм. Массы грузов: m1 = 20 г, m2 = 10 г, координаты центров масс S1 и S2 грузов от плоскости исправления I: lA1 = 200 мм, lA2 = 400 мм, расстояние между плоскостями исправления
L = 600 мм; ρ1 = ρ2 = 100 мм.
10.6. Определить массы противовесов mп1 и mп2, которые необходимо установить на кривошипе АВ и шатуне ВС для полного уравновешивания главного вектора сил инерции всех звеньев кривошипно-ползун- ного механизма, если координаты центров масс S1 и S2 этих противовесов lAS'1 =
=500 мм, lBS'2 = 200 мм, lAB = 100 мм, lBC =
=300 мм; координаты центров масс S1, S2
и S3 звеньев lAS1 = 75 мм, lBS2 = 200 мм, lCS3 = 100 мм; массы звеньев равны m1 =
= 0,1 кг, m2 = 0,7 кг, m3 = 0,8 кг.
361

10.7. Предполагая, что все силы инерции звеньев приведены к общему центру масс S, определить точку приложения, модуль и направление главного вектора сил инерции подвижных звеньев кривошипно-ползун- ного механизма при φ1=45°, если lAB = = 50 мм, lBC = 150 мм; координаты центров масс S1, S2 и S3 звеньев равны
lAS1 = 20 мм, lBS2 = 75 мм, lCS3 = 0, мас-
сы звеньев m1 = 2,5 кг, m2 = 1 кг, m3 = = 1,5 кг. Угловая скорость кривошипа АВ постоянна и равна ω1 = 100 с–1.
Указание. Предусматривается графическое решение, поэтому предварительно надо построить схему механизма, одна точка которого копирует движение общего центра масс подвижных звеньев.
10.8. Определить модуль и направление главного вектора сил инерции подвижных звеньев криво- шипно-ползунного механизма при
φ1 = 45°, если lAB = 50 мм, lBC =150 мм;
координаты центров масс S1, S2 и S3 звеньев равны lAS1 = 10 мм, lBS2 =
=75 мм, lCS3 = 0, массы звеньев m1 =
=2,5 кг, m2 = 1 кг, m3 = 1,5 кг. Угло-
вая скорость кривошипа АВ постоян-
на и равна ω1 = 100 с–1.
10.9. Масса ползуна 3 кривошип- но-ползунного механизма m3 = 0,4 кг. Подобрать массы m1 и m2 шатуна ВС и кривошипа АВ таким образом, чтобы главный вектор сил инерции всех звеньев механизма был уравновешен. Координаты центров масс S1 и S2 звеньев АВ и ВС равны lAS1 = 100 мм,
lBS2 = 100 мм, если lAB = 100 мм, lBC = 400 мм.
362
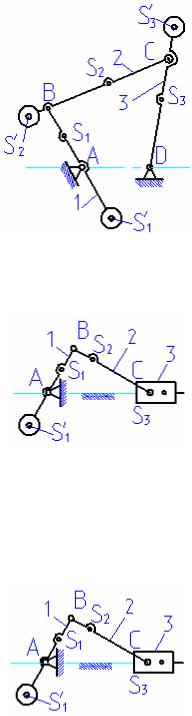
10.10. Определить массы противовесов mп1, mп2, mп3, необходимых для полного уравновешивания главного вектора сил инерции механизма шарнирного четырехзвенника, если lAB = = 120 м, lBC = 400 мм, lCD = 280 мм, координаты
центров масс S1, S2 и S3 |
звеньев равны lAS1 = |
= 75 мм, lBS2 = 200 мм, |
lCS3 = 130 мм, массы |
звеньев m1 = 0,1 кг, m2 = 0,8 кг, m3 = 0,4 кг, ко-
ординаты центров масс S'1, S'2, S'3 противовесов
lAS'1 = 100 мм, lBS'2 = 200 мм, lCS'3 = 130 мм. Зада-
чу решить, полагая, что общий центр масс подвижных звеньев механизма должен быть неподвижен и лежать в точке А.
10.11. Определить массу противовеса mп, который необходимо установить на кривошипе АВ кривошипно-ползунного механизма для полного уравновешивания вертикальной составляющей главного вектора сил инерции всех звеньев механизма, если координата центров масс S'1 этого противовеса lAS'1 = 600 мм; размеры звеньев lAB = 100 мм, lBC = 500 мм; координа-
ты центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 = 150 мм, lCS3 = 100 мм; массы звеньев рав-
ны m1 = 0,3 кг, m2 = 1,5 кг, m3 =2,0 кг.
10.12. Определить массу mп противовеса, который необходимо установить на кривошипе АВ кривошипно-ползунного механизма для уравновешивания сил инерции массы кривошипа и той части массы шатуна ВС, которая может быть отнесена к точке В после разноса (статического) его массы на две, сосредоточенные в точках В и С, если координата центра масс S'1 противовеса lAS'1 = 600 мм. Размеры звеньев lAB = 100 мм, lBC = 500 мм; координаты
центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 =150 мм, lCS3 = 100 мм; массы звеньев рав-
ны m1 = 0,3 кг, m2 = m3 = 1,5 кг.
363
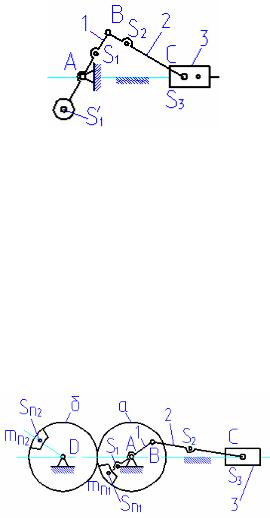
10.13. Определить массу mп противовеса, который необходимо установить на кривошипе АВ кривошипно-ползун- ного механизма для уравновешивания главного вектора сил инерции звеньев механизма, если координата центра масс
S'1 противовеса lAS'1 = 600 мм. Размеры звеньев lAB = 100 мм, lBC = 500 мм; координаты центров масс S1, S2 и S3 звеньев
lAS1 = 75 мм, lBS2 = 200 мм, lCS3 = 100 мм;
массы звеньев равны m1 = 0,3 кг, m2 = = 1,5 кг, m3 = 3,0 кг.
Указание. Предварительно развести статически массу шатуна на две точки, совпадающие с точками В и С. У ползуна уравновешивать только силу инерции первого порядка.
10.14. Определить массы mп1 и mп2 противовесов, которые надо установить на колесах а и б для полного уравновешивания сил инерции первого порядка звеньев кривошипно-ползун- ного механизма, если координаты центров масс SпI и SпII противовесов lASп1 =
= lDSп1 = 50 мм, а радиусы колес одинаковы. Размеры звеньев: lAB = 100 мм,
lBC = 400 мм; координаты центров масс
S1, S2 и S3 звеньев lAS1 = 30 мм, lBS2 = = 100 мм, lCS3 = 0; массы звеньев равны
m1 = 2,5 кг, m2 = 1,0 кг, m3 = 3,0 кг.
Указание. Решить задачу в следующей последовательности:
а) уравновесить силы инерции звеньев механизма в вертикальном направлении;
б) уравновесить силы инерции звеньев в горизонтальном направлении. Принимать во внимание только силы инерции первогопорядка.
364

11.УРАВНОВЕШИВАНИЕ РОТОРОВ
Вмашиностроении и приборостроении любое вращающееся тело называют ротором (шкивы, зубчатые колеса, звездочки цепных передач, соединительные муфты, маховики, диски сцепления, шлифовальные круги, колеса автомобиля, диски турбин и т.п.). Роторы многих приборов вращаются с частотой 75 тыс. об/мин; роторы центрифуг, предназначенных
для получения биологических эмульсий, имеют частоту вращения 500 тыс. об/мин. При конструировании таких роторов необходимо решить задачи динамического синтеза, связанные с распределением масс по условиям уменьшения динамических реакций в опорах ротора.
11.1. Статическая неуравновешенность ротора
Рассмотрим двухопорный ротор, вращающийся относительно оси OZ (рис. 11.1) с угловой скоростью ωG и угловым ускорением ε .
Рис. 11.1. Схема двухопорного ротора
В точках O1, O2 расположены опоры ротора. Выберем систему координат O1XYZ, вращающуюся вместе с ротором. Положение элементарной массы dm в теле ротора определим радиус-вектором r , проведенным из начала координат.
Положение этой массы можно характеризовать и вектором eG, который является кратчайшим расстоянием до оси вращения. Вектор eG называется эксцентриситетом неуравновешенной массы. Произведение массы на ее эксцентриситет называется элементарным дисбалансом: dD = eG dm .
Элементарныйдисбаланснаправленпоэксцентриситету. Через Fo1 x , Fo1 y , Fo2 x , Fo2 y обозначеныпроекциидинамическихреакцийвопорахротора.
Измеханикиизвестновыражениедлясилыинерцииэлементарноймассы:
G |
= − εG rG+ ωGω( G |
rG) |
dm . |
(11.1) |
dF |
||||
|
|
|
|
|
365

Распишем проекции векторов, входящих в выражение (11.1):
|
εG: (0;0;ε ); r : ( x; y; z );ω G : (0;0;ω ) . |
(11.2) |
|
Для проекций вектора dF получим |
|
|
|
G |
= (ε y+ ω 2 x )dm;−(ε +x ω |
2 y )dm; 0 . |
(11.3) |
dF |
|||
|
|
|
|
Интегрируя по всему объему, определим проекции силы инерции:
Fx = ∫ dFx = ε ∫ ydm+ ω |
2 ∫ xdm= |
mε( |
y+s ω |
2 xs ) , |
(11.4) |
|
m |
m |
m |
|
|
|
|
Fy = ∫ dFy = −ε ∫ xdm+ ω |
2 ∫ ydm= |
mε( |
x+s ω |
2 xs ), |
(11.5) |
|
m |
m |
m |
|
|
|
|
|
Fz = 0, |
|
|
|
(11.6) |
|
гдеxs, ys – координаты центра масс ротора; m – масса ротора. Далее получаем модуль вектора:
F = F 2 x + F 2 y = m (xs2 + ys2 ) ω 4+ ε 2= mecm ω +4ε 2 . (11.7)
Произведение массы ротораG на эксцентриситетG его центра масс называется дисбалансом ротора D = meGcm . Вектор F называется главным век-
тором сил инерции ротора, он приложен в его центре масс S.
Таким образом, статическая неуравновешенность ротора характеризуется наличием дисбаланса его массы или смещением центра масс с оси вращения. Возникающий при этом вектор F вG общем случае не совпадает по направлению с вектором дисбаланса D . При постоянной частоте вращения направления этих векторов совпадают.
11.2. Моментная неуравновешенность ротора
Момент силы инерции элементарной массы относительно начала координат находим из выражения
|
|
|
G |
G |
G |
|
|
(11.8) |
|
|
|
|
dM = r dF . |
|
|
||||
С учётом (11.2), (11.3) получаем его проекции: |
|
|
|
||||||
G |
( |
ε z x dm− ω 2 |
y z dm |
) |
( |
2 x z dm |
) |
, |
|
dM : [ |
|
,ε y z dm− ω |
|
||||||
− ε (x2 + y2 )dm].
366

Проинтегрировав в проекциях, найдём:
M x |
= ∫ dM x |
= ε ∫ x z dm− ω |
2 ∫ y z dm . |
(11.9) |
|
m |
m |
m |
|
M y |
= ∫ dM y |
= ε ∫ y z dm+ ω |
2 ∫ x z dm . |
(11.10) |
|
m |
m |
m |
|
|
M z = ∫ dM z = −ε ∫ (x2 + y2 )dm . |
(11.11) |
||
|
m |
m |
|
|
Интегралы в последних выражениях представляют собой центробежные Jxz, Jyz и осевой Jz моменты инерции. Получаем:
M x |
= J xz ε − J yz ω |
2 . |
(11.12) |
M y |
= J yz ε − J xz ω |
2 . |
(11.13) |
|
M z = J z ε . |
|
(11.14) |
Модуль главного момента M сил инерции ротора находится из выражения:
M = M x2 + M y2 = J xz2 + J yz2 ω 4+ ε 2= M D ω +4ε |
2 , |
(11.15) |
где M D – модуль главного момента дисбалансов ротора; M D |
= |
J xz2 + J yz2 . |
Таким образом, моментная неуравновешенность ротора характеризуется наличием главного момента дисбалансов, направленного перпендикулярно оси вращения.
Величина и направление главного вектора сил инерции F не зависят от центра приведения элементарных сил, а величина и направление главного момента сил инерции M зависят (на рис. 11.1 он приложен в точке O1).
Для выделения проекций массово-геометрических характеристик из проекций силовых (11.4), (11.5) и моментных характеристик (11.12), (11.13) достаточно принять ω = 1 (аналог скорости, безразмерная величина) и ε = 0 (аналог ускорения). При этих условиях получим
Dx = m xs ; |
Dy = m ys . |
(11.16) |
MDx = −J yz ; |
MDy = J xz . |
(11.17) |
Если равны нулю массогеометрические характеристики |
( Dx = 0 ; |
|
Dy = 0 ; MDx = 0 ; MDy = 0 ), то нулю равны главный вектор сил инерции, и главный момент сил инерции ротора.
367

Следовательно, условия, при которых проекции динамических реакций в опорах ротора будут равны нулю, запишутся в виде
xs = 0; |
ys = 0; |
J xz = 0; J yz = 0. |
(11.18) |
Это означает, что ось вращения ротора должна быть главной цен- |
|||
тральной осью. Момент M z |
= −J z ε |
непосредственно на динамические |
|
реакции не влияет, и его можно не принимать во внимание.
Виды неуравновешенности ротора можно различать по его массогеометрическим характеристикам:
– при статической неуравновешенности ротора
xs |
≠ |
0; |
ys≠ |
0; |
J xz= |
0; |
J yz= |
0; |
(11.19) |
– при моментной неуравновешенности |
|
|
|
||||||
xs |
= 0; |
ys |
= 0; |
J xz ≠ |
0; |
J yz≠ |
0; |
(11.20) |
|
– при динамической неуравновешенности |
|
|
|||||||
xs |
≠ |
0; |
ys≠ |
0; |
J xz≠ |
0; |
J≠yz |
0. |
(11.21) |
Итак, неуравновешенность – это состояние ротора, отличающееся таким распределением масс, которое во время вращения вызывает переменные нагрузки в опорах ротора. Мерой статической неуравновешенности является дисбаланс ротора D, мерой моментной неуравновешенности – главный вектор дисбаланса MD.
11.3.Приведение неуравновешенности ротора
кдвум плоскостям коррекции
Всякий ротор имеет множество дисбалансов, расположенных в различных плоскостях вращения. Выполняя уравновешивание ротора, можно было бы каждый из этих дисбалансов уменьшить до определённого значения. Для этого надо создавать в теле ротора дополнительные дисбалансы, направленные противоположно исходным дисбалансам, что обеспечивается постановкой дополнительных масс, которые называются корректирующими. Такой путь приводит к значительному увеличению массы ротора, поэтому применим другой метод.
Выберем в роторе три плоскости П, П1, П2 (рис. 11.2), перпендикулярные оси вращения. Подвижную систему координат OXYZ поместим в плоскость П.
368
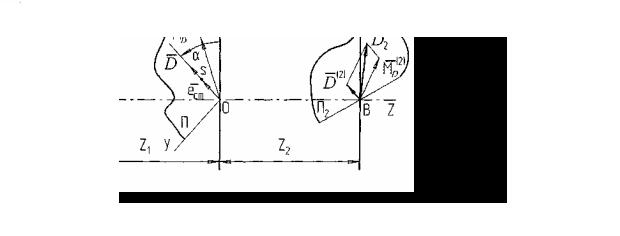
Рис. 11.2. Приведение неуравновешенности к двум плоскостям коррекции
В этой плоскости на линии главного вектора дисбалансов D находится центр масс ротораG , он составляет угол α с осью OX. Главный момент дисбалансов M D расположен в этой же плоскости П, он приложен в центре приведения, т.е. в начале координат, и составляет угол λ
сосью OX.
Сучётом (11.16), (11.17) находим тригонометрические функции углов α и λ :
|
|
|
cos α = |
|
mxs |
; |
sinα = |
|
mys |
; |
|
(11.22) |
||||
|
|
|
|
D |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
D |
|
|
||||
|
|
|
cos λ = |
J yz |
|
; |
sinλ = |
|
J |
xz |
. |
|
(11.23) |
|||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
M D |
|
|
|
|
|
M D |
|
|
|||
Плоскости П1, П2 выбираются |
из |
конструктивных |
соображений |
|||||||||||||
и называются плоскостями коррекции. |
Вектор дисбаланса D предста- |
|||||||||||||||
вим векторами |
D(1) |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, D( 2) , расположенными в плоскостях коррекции, со- |
||||||||||||||||
блюдая условия |
|
G |
G |
|
G |
|
G |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
D(1) |
+ D( 2) |
= D; |
|
D(1) Z1 + D( 2) Z2 |
= 0 |
(11.24) |
||||||||
где Z1, Z2 – аппликаты плоскостей коррекции с учётом их знаков.
В последнем выражении используютсяG G G модули дисбалансов, а не векторы, так как три дисбаланса D, D(1) , D( 2) параллельны.
С учётом (11.24), получаем
G |
(1) |
= −D |
|
Z2 |
; |
G |
(2) |
= −D |
Z1 |
. |
(11.25) |
D |
|
|
|
D |
|
|
|||||
|
Z1 |
− Z2 |
|
Z1 − Z2 |
|||||||
|
|
|
|
|
|
|
|
|
369

Знаменатель Z1 − Z2 представляет собой расстояние AB между плос-
костями коррекции. Пару дисбалансов M D(1) , M D( 2) также |
располагаем |
||||||||||||
в плоскостях коррекции, соблюдая условие |
|
||||||||||||
|
|
|
M D(1) |
|
= |
|
M D( 2) |
|
= |
M D |
. |
(11.26) |
|
|
|
|
|
|
|
||||||||
|
|
|
|||||||||||
Вектор |
G |
|
|
|
|
|
|
|
|
AB |
|
||
|
|
|
|
|
|
|
|
|
|||||
направлен перпендикулярно плоскости |
пары. Если |
||||||||||||
M D |
|||||||||||||
|
|
G |
|
||||||||||
смотреть с конца вектора M D , то момент пары должен быть положитель-
ным, т.е. направленным против часовой стрелки. Иначе говоря, вектор
M D(1) в одной из плоскостей составляет с осью угол λ + 90° , вектор |
||||
M D(2) в другой плоскости составляет с той же осью угол λ + 270° . |
||||
Складывая |
геометрически векторы |
G |
G |
получим эквивалент- |
D(1) |
, M D(1) , |
|||
|
G |
|
|
|
ный дисбаланс |
D1 в первой плоскости коррекции: |
|
||
|
G |
G |
|
(11.27) |
|
D = D(1) + M (1) |
|
||
|
1 |
D |
|
|
Аналогично для второй плоскости коррекции (рис. 11.2, 11.3):
Рис. 11.3. Эквивалентные дисбалансы и дисбалансы корректирующих масс
|
G |
|
G |
|
G |
(11.28) |
|
D |
= D(2) + M ( 2) . |
||||
G G |
2 |
|
|
|
D |
|
|
|
|
|
|
|
|
Дисбалансы D1 , D2 |
развивают такие силы инерции: |
|
||||
F = D ω 4+ ε |
2 ; |
F= |
D ω +4ε 2 . |
(11.29) |
||
1 |
1 |
|
|
2 |
2 |
|
370