

387
.pdf
|
|
Q* |
|
|
|
B* |
B |
|
ОУ |
|
Q |
УА |
|
|
|||
Y* |
|
|
|
|
|
Х |
P |
|
|
|
U |
Z* |
Z |
W* |
|
W |
Y |
|
|
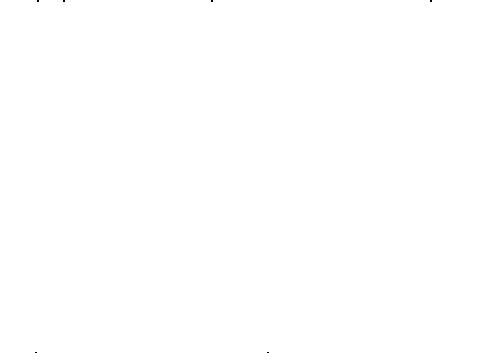
Рис. 2. Структурная схема системы логического управления
Часть управляющего автомата, формирующая непосредственно выходные сигналы Р, может быть получены из описания СЛУ операцией разделенияОТСсистемыX.Y*:Y повыходам, посколькуY= P Q:
X.Y*:Y = {X.Y*:P , X.Y*:Q}. |
(1) |
Данная часть УА задается ОТС X.Y*:Р, но поскольку Y = Q Р,
то
X.Y*:P = X.Q*.P*:P. |
(2) |
Моделирующая часть УА получается при разделении по выходам OTCоу, имеющей вид В.Y*oy:Yoy. Поскольку Yoy=W Q, то В.Y*oy: Yoy путем разделения повыходам можно представить ввиде
B. Y*oy: Yoy = {B. Y*oy:W , B. Y*oy:Q}. |
(3) |
Поэтому часть УА, моделирующая ненаблюдаемые выходы УА, полностью описывается ОТС вида B.Y*oy :W , откуда с учетом, что Уоу= Q W и Z = W , получаем
B. Y*oy:W = B.Q*.W*:W = B.Q*.Z*:Z. |
(4) |
Здесь принимается W = Z, т.к. рассматриваемая часть А моделирует функционирование ненаблюдаемой частиОУ, имеющей выходыW.
Собственно управляющая часть УА может быть получена композицией части СЛУ, оставшейся после выделения подавтомата, формирующего выходы Р, т.е. подавтомата X.Y*:Q , и автомата, обратносопряженного по входам В по отношению к подавтомату, оставшемуся
141
после выделения из ОУ части, формирующей ненаблюдаемые выходы W, т.е. по отношению к подавтомату B.Y*oy:Q. Тогда (В.Y*oy:Q) оB=Y*oyQ:B, приэтом
(В. Y*oy:Q оB →(X.Y*:Q) = (Y*oy.Q:В) →(X.Y*: Q) =
= (W*.Q*.Q:B) → (X.Q".P*:Q) =
= W*.Q*.X.P*:В = X.W*.Q*.P*:В. |
(5) |
Таким образом, полное описание управляющего автомата составляется из (2), (4), (5):
{ X.Q*.P*:P , B.Q*.W*:W , X.W*.Q*.P:B }. |
(6) |
Поскольку для получения управляющей части УА использовалось обратносопряженное описание, которое в общем случае задает некоторое множество автоматов, то и описание (6) также задает в общем случае множество автоматов, удовлетворяющих исходным условиям.
Для получения единственного описания управляющего автомата необходимо произвести выбор по заданным критериям оптимальности из определяемого с помощью (6) множества автоматов.
Из анализа процесса получения описания управляющего автомата следует утверждение о том, что для возможности синтеза управляющего автомата по описаниям системы и объекта управления достаточно, чтобы в описании объекта управления тем или иным способом были заданы все выходные наборы (слова) Q.Y, использующиеся в описании функционирования всей СЛУ.
Действительно, если в описании УА заданы все выходные наборы qi = yk ... qj = уi(Q Y), имеющиеся в описании СЛУ, то точно определено, какими входными воздействиями управляющего автомата они могут быть сформированы на выходах ОУ, поскольку OTCоу устанавливает зависимость Q и W от Q*, W*, B. Этой информации достаточно для синтеза УА, способного заставить сформировать на выходах СЛУ требуемые выходные наборы.
Следствием этого утверждения является вывод о возможности синтеза управляющего автомата по недоопределенным описаниям СЛУ и объекта управления при соблюдении условия, определенного в утверждении.
142
Покажем работоспособность метода на следующем примере: используя в качестве объекта управления элемент 2ИЛИ-НЕ, синтезируем RS-триггер.
Обобщенные таблицы состояния RS-триггера и элемента 2ИЛИНЕ приведены в табл. 1 и 2 соответственно.
|
|
|
|
Таблица 1 |
|
Таблица 2 |
|
|
Таблица 3 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Входы |
|
Выход |
Входы |
Выход |
Вход |
Выходы |
|||||||
R |
S |
Y |
Y |
|
B1 |
B2 |
Y |
|
Y |
B1 |
B2 |
|
||
0 |
|
0 |
|
0 |
0 |
|
0 |
0 |
1 |
|
1 |
0 |
0 |
|
0 |
|
0 |
|
1 |
1 |
|
- |
1 |
0 |
|
0 |
- |
1 |
|
0 |
|
1 |
|
- |
1 |
|
1 |
- |
0 |
|
0 |
1 |
- |
|
1 |
|
0 |
|
- |
0 |
|
|
|
|
|
|
|
|
|
Поскольку множества выходов системы и объекта управления совпадают, то для дальнейших преобразований используются исходные ОТС (табл. 1 и 2). Обратносопряженная по входам В ОТСoy приведена в табл. 3. Результат композиции полученной обратносопряженной ОТСoy (табл. 3) и ОТС системы (табл. 1) приведен в табл. 4.
Таблица 4 |
Таблица 5 |
|
Входы |
|
Выход |
|||
|
|
|
|
|
|
|
R |
|
S |
|
Y |
B1 |
B2 |
0 |
|
0 |
|
0 |
- |
1 |
0 |
|
0 |
|
0 |
1 |
- |
0 |
|
0 |
|
1 |
0 |
0 |
0 |
|
1 |
|
- |
0 |
0 |
1 |
|
0 |
|
- |
- |
1 |
1 |
|
0 |
|
- |
1 |
- |
|
|
|
|
|
|
|
|
Выходы по вариантам |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Входы |
|
|
1 |
|
|
2 |
|
3 |
|
|
4 |
||||||
R |
S |
Y |
B1 |
|
B2 |
|
B1 |
|
B2 |
B1 |
|
B2 |
|
B1 |
|
B2 |
||
0 |
|
0 |
|
0 |
- |
|
1 |
|
1 |
|
- |
- |
|
1 |
|
1 |
|
- |
0 |
|
0 |
|
1 |
0 |
|
0 |
|
0 |
|
0 |
0 |
|
0 |
|
0 |
|
0 |
0 |
|
1 |
|
- |
0 |
|
0 |
|
0 |
|
0 |
0 |
|
0 |
|
0 |
|
0 |
1 |
|
0 |
|
- |
- |
|
1 |
|
- |
|
1 |
1 |
|
- |
|
1 |
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
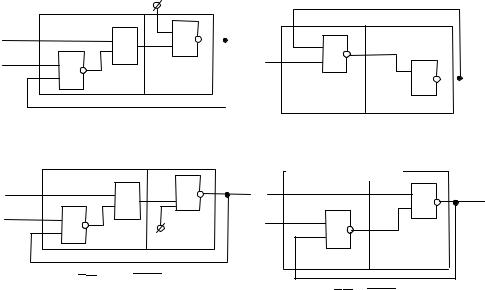
ОТС, приведенная в табл. 4, определяет множество из четырех управляющих автоматов, каждый из которых соответствует условиям примера, отличаясь от других лишь сложностью реализации. Все четыре возможные управляющие автоматы приведены в табл. 5, а их аппаратная реализация совместно с объектом управления показана на рис. 3.
143
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В1 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УА1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОУ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В1 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
Y |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОУ |
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УА2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
B |
|
= |
|
|
R = |
|
R, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
2 |
S |
Y |
S Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= S Y = S Y, |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B1 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= R. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
УА3 |
1 |
В1 |
1 |
Y |
R |
УА4 |
В1 |
1 |
Y |
|
|
|
|
|
|
|
S |
1 |
S |
|
1 |
|
|
|
В2 0 |
ОУ |
|
В2 ОУ |
|
|
|
|
|
|
|
|
|
|
|
|
B1 = SY R = S Y R, |
|
|
= SY = S Y, |
||
B |
|
= 0. |
|
||
2 |
B2 |
||||
|
|
|
|
= R. |
|
|
|
|
B |
||
|
|
|
|
1 |
|
Рис. 3. ВариантысхемСЛУ
Как видно из рис. 3, все четыре схемы являются RS-триггерами, причем две из них имеют более простую схему, которая является широко известной схемой RS-триггера на двух элементах 2ИЛИ-НЕ.
Библиографический список
1.Горбатов В.А. Логическое управление технологическими процессами / В.А. Горбатов, В.Е. Кафаров, П.Г. Павлов. – М.: Энер-
гия, 1978. – 272 с.
2.Мелихов А.Н. Ориентированные графы и конечные автоматы
/А.Н. Мелихов. – М.: Наука, 1971. – 416 с.
3.Бибило П.Н. Синтез комбинационных схем методами функциональной декомпозии / П.Н. Бибило, С.В. Енин; под ред. А.Д. Закревского. – Минск.: Наука и техника, 1987. – 189 с.
4.Новорусский Е.Е. Конечно-автоматные системы управления (принципы построения и анализ поведения) / Е.Е. Новорусский. – Новосибирск: Наука, 1982.
5.Миллер Р. Теория переключательных схем. Т. 1 / Р. Миллер
– М.: Наука, 1970. – 416 с.
144
6.Гаврилов М.А. Избранные труды. Теория релейных устройств
иконечных автоматов / М.А. Гаврилов. – М.: Наука, 1983. – 272 с .
7.Викентьев Л.Ф. Групповая интерпретация дискретных автоматов, заданных табличными способами / Л.Ф. Викентьев, A.M. Дерябин; Перм. политехн. ин-т; деп. в ВИНИТИ № 4949-В86. –Пермь, 1986.
8.Закревский А.Л. Алгоритмы синтеза дискретных автоматов / А.Л. Закревский. – М.: Наука, 1971.
9.Рот Дж. П. Алгебротопологические методы синтеза переключательных схем / Дж. П. Рот // Вопросы теории математических машин. – М.: Машиностроение, 1964.
Получено 25.01.2007
145
УДК 62-52.001.63
В.Г. Коломыцев
Пермский государственный технический университет
Л.И. Кибрик
Пермский государственный институт искусства и культуры
МЕТОД ПРЕДЕЛЬНЫХ ПЕРЕХОДОВ КАК ОСНОВА РАСЧЁТА УСТАНОВИВШИХСЯ РЕЖИМОВ РАБОТЫ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ АСТАТИЧЕСКИХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Приведена методика расчёта параметров регулятора и цепи обратной связи астатических автоматических систем.
Совершенствование методов проектирования систем управления путем разработки прямых методов расчета показателей качества, повышения общности постановки задач, методической точности расчета параметров, простоты и наглядности проектных решений – основа повышения качества проектирования систем управления.
Одним из этапов проектирования автоматических систем является расчет стационарного (установившегося) режима работы. Для выполнения этого этапа расчета разработаны следующие методы: метод расчета по заданным коэффициентам рассогласования, позволяющий достичь необходимой точности при условии наличия априорных данных о форме сигнала рассогласования, метод эквивалентного синусоидального воздействия, предложенный Я.Е. Гукайло (предполагает, что входное воздействие синусоидальное и амплитуды скорости и ускорения равны максимальным заданным значениям), метод расчета установившегося режима работы системы с неединичной обратной связью, который позволяет определить положение низкочастотной асимптоты требуемой спектральной характеристики разомкнутой системы, метод предельных переходов для статических систем и др. [1–5]. Однако существующие методы не позволяют достаточно просто, наглядно и точно определить передаточные коэффициенты прямого канала и обратной связи астатических автоматических систем.
146
Для устранения этого пробела разработан метод расчета установившегося режима работы линейной непрерывной астатической автоматической системы, называемый методом предельных переходов. В основу метода положено следующее утверждение.
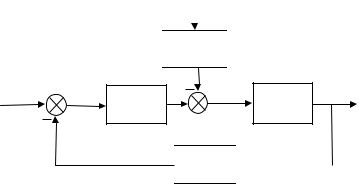
Пусть задана обобщенная структурная схема астатической САУ (рисунок).

 f
f

 W f ( p)
W f ( p) 

u |
Wp ( p) |
Wo ( p) |
y |
|

 Woc ( p)
Woc ( p) 

Рис. Обобщенная структурная схема астатической системы
Здесь |
W ( p) = |
kp Np ( p) |
, |
W ( p) = |
k |
N |
( p) |
, |
W ( p) = |
k |
oc |
N |
oc |
( p) |
, |
||||
|
|
o |
o |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
p |
|
pMp ( p) |
|
o |
Mo ( p) |
|
oc |
|
Moc ( p) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
Wf (p) = |
k f N f (p) |
|
, ko |
– передаточный коэффициент объекта по каналу |
|||||||||||||||
koM f (p) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
управления, k f – передаточный коэффициент объекта по каналу возмущения, kp – передаточный коэффициент регулятора, koc – переда-
точныйкоэффициент обратнойсвязи.
Полиномы числителей и знаменателей не содержат множителя p (свободные члены их равны единице). Приняты следующие допущения: в первом приближении равны статические и динамические передаточные коэффициенты звеньев; номинальному входному воздействию Uном соответствует номинальная величина выходной
функции Yном по каналу управления; возмущающее воздействие линейно возрастает, величина скорости нарастания равна v; допустимая установившаяся ошибка по каналу возмущения δfст задана в процентах от номинального значения выходной функции Yном .
147

Тогда передаточные коэффициенты регулятора и обратной связи определяются по формулам
kp = |
100k f |
v |
, |
(1) |
|
kоδf стUном |
|||||
|
|
|
|||
kос = Uном . |
|
(2) |
|||
|
Yном |
|
|
|
|
Докажем это утверждение. Статический передаточный коэффициент замкнутой системы по каналу управления ku определяется ус-
тановившимся значением переходной функции, которое можно получить, применив предельный переход для передаточной функции замкнутой системы по каналу управления:
k |
u |
= lim |
|
|
Wp ( p)W0 ( p) |
= |
1 |
. |
(3) |
|||
1 |
+W |
( p)W |
( p)W ( p) |
k |
|
|||||||
|
p→0 |
|
oc |
|
|
|||||||
|
|
|
|
|
p |
0 |
oc |
|
|
|
|
|
Из определения коэффициента передачи замкнутой системы сле-
дует, что ku = Yном . Учитывая (3), доказываем, что равенство (2) ут-
Uном
верждения справедливо.
Для доказательства равенства (1) определим установившуюся ошибку системы по каналу возмущения y f (∞) при линейно возрас-
тающей функции f (t) = vt:
y f (∞) = lim pYf ( p) =
|
|
|
|
|
|
p→0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
f |
( p)W ( p) |
|
v |
|
k |
f |
v . |
(4) |
||||
= lim p |
− |
|
|
o |
|
= − |
|
|
|
|
|
|
||||
|
|
|
|
p2 |
k |
k |
k |
|
|
|
||||||
p→0 |
|
|
1+W ( p)W ( p)W ( p) |
|
oc |
|
||||||||||
|
|
|
p |
|
o |
oc |
|
|
|
p |
|
o |
|
|
||
Учитывая заданную допустимую величину статической ошибки
− |
k f v |
= − |
|
δfст |
Y , |
|
100 |
||||
|
kpkokoc |
ном |
|||
найдем передаточный коэффициент регулятора k 100k f v .
p = koδfстUном
148
Равенство (1) доказано.
К числу преимуществ этого метода следует отнести применимость метода для расчета систем с отрицательной неединичной обратной связью при минимуме информации о возмущении и небольшой объем необходимых вычислений.
Использование компьютерных информационных сред снижает вероятность ошибок и избавляет разработчика от необходимости строить графики сложных функций и проводить алгебраические расчеты вручную, при этом математическая модель системы остается гибкой и по необходимости может быть легко модифицирована и перенастроена в соответствии с изменившимися требованиями.
Библиографический список
1.Бесекерский В.А. Теория систем автоматического управления
/В.А. Бесекерский, Е.П. Попов. – СПб.: Профессия, 2003.
2.Диркс Г.Г. Метод предельных переходов как основа расчета статики линейных непрерывных САУ / Г.Г. Диркс, В.Г. Коломыцев, Н.А. Азовский // Информационные управляющие системы; Перм. гос. техн. ун-т. – Пермь, 1998.
3.Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп. – М.: Лаборатория базовых знаний, 2004.
4.Лукас В.А. Теория управления техническими системами: учеб. пособие для вузов/ В.А. Лукас. – Екатеринбург: Изд-воУГГУ, 2005.
5.Г.Г. Диркс. Проектирование микропроцессорных систем автоматического управления. Ч.1. Синтез системы автоматического управления: учеб. пособие / Г.Г. Диркс, В.Г. Коломыцев; Перм. гос. техн. ун-т. – Пермь, 1997.
Получено 25.01.2007
149
УДК 621.3
В.П. Куприн, А.Б. Петроченков, А.В. Ромодин
Пермский государственный технический университет
НЕКОТОРЫЕ МЕТОДЫ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ ЭНЕРГОСИСТЕМ
Описываются некоторые методы моделирования систем, формулируются критерии моделирования элементов электроэнергетических систем, рассматриваются некоторые возможности оптимизации алгоритма моделирования.
Существующие методики имитационного моделирования делятся на два класса: статические и динамические [1-5]. При статическом моделировании используются статические модели элементов, а в результате расчета получаются показатели установившегося режима работы. Статическое моделирование, несмотря на свою ограниченность, имеет широкий класс применений, наиболее важным из которых является анализ статической устойчивости. Кроме того, статическое моделирование иногда используют как подготовительный этап перед динамическим моделированием. При этом становится возможным анализировать переходные процессы, возникающие при переходе системы из одного устойчивого состояния в другое.
Динамическое моделирование – универсальный метод имитационного моделирования. Единственным недостатком, препятствующим его применению, является повышенная сложность его реализации. Применение ЭВМ в целях динамического имитационного моделирования непрерывных процессов позволяет получить, как правило, лишь некоторое дискретное приближение. В этом случае говорят о квазидинамическом моделировании. При данном подходе используют динамические модели структурных элементов моделируемой системы, представленные аппроксимированными на каждом шаге расчета дифференциальными уравнениями. В зависимости от точности выбора модели можно говорить о точности полученных результатов при рассмотрении конкретного переходного процесса.
150