

387
.pdfисследований. При использовании в модели 4-квадратичного полинома необходимо десять полимеров. При заданном температурном профиле корпуса экструдера для каждого полимера проводятся экспериментальные измерения выходных характеристик в установившемся режиме для трех различных скоростей вращения шнека N [Nmin ; Nmax ]. Таким образом, получается тридцать экспери-
ментальных значений каждого из выходных параметров P, T, Q . В алгоритме идентификации АИ (рис. 2) используется информация о зафиксированных в результате эксперимента входных (распределение температуры корпуса, скорость вращения шнека) и выходных параметрах, а также полученная заранее в результате лабораторных измерений информация о реологии полимера (µ0 ,n,β).
С целью уменьшения затрат параметрическую идентификацию разумно проводить с использованием сложной пространственной математической модели. При этом недостающие экспериментальные данные восполняются данными из численного эксперимента на данной модели. Экспериментальные данные получаются в режиме нормального функционирования экструдера при производстве продукции. При этом до
начала работы экструдера в результате лабораторных измерений определяется информация о реологии перерабатываемого полимера ( µ0 ,n,β). Методом наименьших квадратов производится уточнение
оператора модели (коэффициентов полинома (6)) с использованием данных как численных, так и натурных экспериментов. Процесс идентификации продолжается данным способом до тех пор, пока количество натурных экспериментальных данных не станет больше или равно числу факторов интерполяционного полинома.
181
Библиографический список
1.Ковригин Л.А. Автоматизированное управление процессом экструзии полимеров / Л.А. Ковригин, Н.М. Труфанова; УрО РАН. – Екатеринбург, 2002.
2.Исследование тепломассопереноса и фазовых превращений при переработке полиэтилена в экструдере со шнеком Бара и Майлифера / Н.М. Труфанова и [др.] // Тепломассообмен ММФ: сб. докл. IV Международного Форума. – Минск, 2000 – С. 219–226.
3.Elbirli B. Mathematical modeling of melting of polymers in bar- rier-Screw extruders / B. Elbirli, J.T. Lindt // Polim. Eng. Sci. 1983. Vol. 23.
№2. P. 86–94.
Получено 25.01.2007
182
УДК 651.456 651.463
А.А. Шишмаков, А.Ю. Чудинов
Пермский государственный технический университет
БЛОК УПРАВЛЕНИЯ ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА МГ-3
Рассматриваются основные принципы построения и работы систем, входящих в состав блока управления датчика угловых скоростей.
Создание нового типа модуляционного несимметричного динамически настраиваемого гироскопа и датчика угловых скоростей (ДУСа) на его основе представляет собой новое направление в прикладной теории гироскопических приборов и систем [1-4]. Кроме того, это новое направление развития гироскопической техники, использующее накопленный опыт из различных областей науки и техники. МГ служит для измерений малых углов и угловых скоростей поворота основания в инерциальном пространстве в режиме датчика угловых скоростей. Используется в качестве чувствительного элемента инерциальной навигационной системы.
Разработка нового образца блока управления или сервисной электроники датчика угловых скоростей вызвана недостатками первых образцов гироскопических комплектов (ДУС + блок управления), а именно:
−низкой точностью измерения угловых скоростей, связанной
снеудовлетворительной стабильностью вращения ротора гироскопа;
−очень низкими парируемыми угловыми скоростями;
−большой площадью, занимаемой сервисной электроникой. Блок управления включает в себя две системы:
−систему управления разгоном гироскопа;
−систему стабилизации угла чувствительного элемента.
В ходе разработки нового образца блока управления ДУСа необходимо решить следующие задачи:
183
−обеспечить форсированный разгон гироскопа и стабилизацию вращения на рабочих оборотах;
−уменьшить «дребезг» сигналов генератора опорных импульсов (ГОИ);
−уменьшитьзависимостьточностныхпараметровоттемпературы;
−смонтировать систему стабилизации угла чувствительного элемента во вращающейся системе координат;
−обеспечитьвыдачуинформационногосигналаДУСавцифровом виде, чтоупростит последующуюобработку выходнойинформации;
−уменьшить площадь, занимаемую сервисной электроникой. Весь блок управления строится на базе микроконтроллера,
предназначенного для формирования управляющих сигналов в обмотках двигателя гироскопа, а также учёта полезной информации, снимаемой с ДУСа, и внесения коррекции по температуре.
Система разгона гироскопа включает в себя схему разгона гироскопа и стабилизации вращения на рабочих оборотах, а также схему обратной связи ротора гироскопа с контроллером при помощи сигнала генератора опорных импульсов (рис. 1).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Канал 1 |
|
Эллиптиче- |
|
|
|
Смеще- |
|
|
|
|
|
|
||||
|
|
ФНЧ |
|
|
|
Обмотка 1 |
||||||||||
|
|
|
ский ФНЧ |
|
|
|
ние |
|
|
|
|
|
|
|||
Контрол- |
|
8-го порядка |
|
|
|
|
|
|
ЦАП |
|
Усили- |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
тель |
|
|
||
лер |
|
|
|
|
|
|
|
|
|
|
|
|
мощно- |
|
|
|
|
Эллиптиче- |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
Смеще- |
|
|
|
сти |
|
|
||||
|
|
|
ский ФНЧ |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
ФНЧ |
|
|
|
|
|
|
Обмотка 2 |
|||||
Канал 2 |
|
8-го порядка |
|
|
ние |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1. Функциональная схема системы разгона гироскопа
Для разгона 2-фазного синхронного двигателя, который имеет девять пар полюсов, необходимо на его обмотки подать синусоидальное напряжение. Причём синусоида на одной обмотке должна быть сдвинута на 90° относительно другой. Другими словами, на одну обмотку необходимо подавать «синус», а на другую «косинус». Так как двигатель синхронный, то его характерной особенностью является постоянство частоты вращения при неизменной частоте питающего напряжения иколебаниях момента нагрузкинавалу, поскольку
np = 60 f / p ,
184
где np – частота вращения ротора синхронного p-полюсного двигателя (об/мин); р – число пар полюсов; f – частота питающего напряжения (Гц).
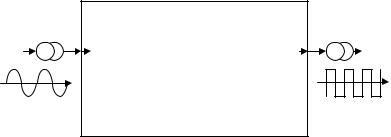
Функциональная схема (см. рис. 1) отображает основную идею управления разгоном гироскопа при помощи контроллера. Основная задача аналоговой части схемы – сформировать на обмотках синхронного двигателя синусоидальное напряжение. Управляющие цифровые сигналы контроллера имеют форму меандра. Эллиптические фильтры служат для преобразования меандра в синусоиду в каждом из каналов.
Сигнал на выходе данного фильтра несёт высокочастотную составляющую, которая вызвана тактовой частотой, с помощью которой устанавливается частота среза. Для того чтобы отфильтровать данную частоту, применяется фильтр низких частот.
Управляющий сигнал на выходе фильтра низких частот имеет постоянную составляющую. Для того чтобы получить симметричный сигнал относительно ноля, применяется смещение, управляемое контроллером.
Для управления амплитудой сигналов применяется цифроаналоговый преобразователь. Изменение амплитуды управляющего сигнала необходимо для оптимизации времени разгона гироскопа, обеспечения надёжного пуска и стабилизации вращения гироскопа в рабочем режиме.
Усилитель мощности необходим для усиления сигнала с ЦАП и обеспечения определённого тока в обмотках двигателя в момент разгона гироскопа, а также в рабочем режиме.
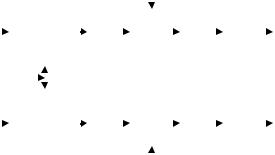
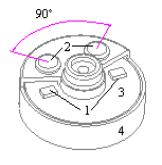
Обратная связь гироскопа с контроллером реализована при помощи генератора опорных импульсов. ГОИ представляет собой два индукционных датчика. Катушки этих датчиков смонтированы на корпусе гироскопа, а постоянные магниты находятся на вращающемся роторе. С каждого датчика снимаются сигналы, сдвинутые по фа-
зе на 90°. Данный сдвиг обеспечивается расположением катушек на корпусе; они располагаются по двум ортогональным осям X и Y. Магниты расположены по периметру ротора под углом в 180° (рис. 2).
185

Кроме того, магниты ориентированны к плоскости катушек разными полюсами. В зависимости от того, какой магнит проходит около катушки, в ней будет формироваться положительный или отрицательный импульс напряжения. В результате каждый из индукционных датчиков за один оборот ротора будет выдавать два импульса – положительный и отрицательный.
Функциональная схема обратной связи ротора гироскопа с контроллером представлена на рис. 3. Для исключения «дребезга» сигналов ГОИ применяются фильтры нижних частот. Для учёта положительных и отрицательных импульсов сигнал подаётся на два аналоговых компаратора, каждый из которых преобразует импульсы одной полярности в сигнал, удобный для обработки последующими цифровыми микросхемами.
Канал X |
|
ФНЧ |
|
|
|
Компаратор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Генератор |
|
|
|
|
|
Компаратор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
опорных им- |
|
|
|
|
|
|
|
|
Сумма |
|
|
Контроллер |
|
пульсов |
|
|
|
|
|
Компаратор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Канал Y |
|
ФНЧ |
|
|
|
Компаратор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 3. Функциональная схема обратной связи
После преобразования производится суммирование всех четырёх сигналов, и данный сигнал подаётся на контроллер. В результате за один оборот гироскопа на контроллер подаётся четыре импульса, что позволяет оценить угол поворота ротора гироскопа.
Для того чтобы определить, по какой из осей происходит парирование угловой скорости, необходимо задаться точкой отсчёта, т.е. начальным импульсом, с которого начинается отсчёт. Для этого на контроллер подаётся сигнал с одного из компараторов.
На микроконтроллере, который лежит в основе сервисной электроники, реализованы следующие функции:
1)генерирование управляющих сигналовдля двигателя гироскопа.
2)цифровой частотно-фазовый детектор.
Блок-схема алгоритма микроконтроллера для управления двигателем гироскопа представлена на рис. 4, а. Частота управляющих сигналов задаётся с помощью таймера. ГОИ генерирует четыре импульса за один оборот ротора, т.е. один импульс приходит через каж-
186
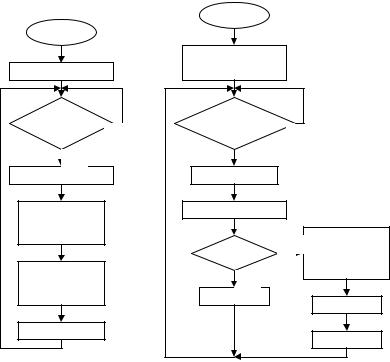
дые 90º. Аналогично таймер генерирует прерывание четыре раза за оборот. Надо определить угол отставания ротора двигателя от вращающегося магнитного поля статора. Для этого подсчитывается количество тактов таймера между прерываниями от таймера и от ГОИ. Зная эту величину, можно оценить угол поворота ротора.
Если пришёл импульс с ГОИ, вычисляется угол
θ = k Nт ,
гдеk – коэффициент пропорциональности, Nт – число тактовтаймера. Между θзад и θ вычисляется разница – отклонение ∆θ
∆θ = θзад −θ.
Начало
Инициализация МК
Пришёл импульс? нет
да Вычисление угла θ
Вычисление отклонения ∆θ от заданного
Вычисление
управляющего
сигнала
Загрузка в ЦАП
Начало |
|
|
Инициализация МК |
|
|
X=0, Y=0 |
|
|
Прерывание |
|
|
от таймера |
нет |
|
да |
|
|
Отсчёт m |
|
|
Вычисление: X, Y |
|
|
|
нет |
Вычисление вы- |
n<N |
ходных сигналов |
|
|
Ux, Uy. |
|
|
|
|
да |
|
|
n = n+1 |
|
X = 0, Y = 0 |
|
|
|
|
|
n = 0 |
а б
Рис. 4. Блок-схемы: а – алгоритм управления двигателем; б – алгоритм частотно-фазового детектора
Зная отклонение реального угла θ от θзад , можно вычислить
управляющий сигнал
U (z) =W (z) ∆θ(z) ,
который необходим для компенсации рассогласования между θ и θзад , гдеW(z) – передаточная функция регулятора.
187
Далее цифровой код загружается в цифроаналоговый преобразователь, который устанавливает амплитуду управляющего сигнала.
Блок-схема алгоритма цифрового частотно-фазового детектора представлена на рис. 4, б. В момент инициализации микроконтроллера происходит сброс счётчиков по оси X и Y. Прерывания от таймера приходят 18 раз за оборот ротора, т.е. при повороте ротора на каждые 20º.
Между прерываниями или за время, за которое ротор совершает поворот на 20º, происходит отчёт импульсов информационного сигнала – m.
Далее вычисляются величины X и Y:
|
|
|
|
n |
||
Xn = Xn−1 |
+ m sin |
2π |
|
|
, |
|
|
|
|||||
|
|
|
|
N |
||
|
|
|
|
n |
||
Yn = Yn−1 + m cos 2π |
|
|
, |
|||
|
|
|||||
|
|
|
N |
|||
где n – число тактовых импульсов таймера, пропорциональных реальному углу поворота ротора; N – число тактовых импульсов, пропорциональных одному обороту ротора.
Величины X и Y являются суммой всех замеров, сделанных за один оборот ротора.
Если n = N, т.е. ротор сделал один оборот, то вычисляются выходные сигналы:
U X = |
X , |
UY = |
Y , |
||
N |
|
N |
|
||
по которым можно судить об угловой скорости, парируемой ДУСом по оси X или Y.
Система стабилизации угла чувствительного элемента и преобразования сигнала датчика угла в частоту смонтирована во вращающейся системе координат. Функциональная схема устройства представлена на рис. 5. В соответствии с этим питание и съём информационного сигнала осуществляются через токоподвод и токосъём соответственно. Токоподвод и токосъём представляют собой трансформатор с воздушным зазором, ротор которого вращается относительно статора. Феррит с первичной обмоткой (статор трансформатора) смонтирован на неподвижном корпусе, а феррит с вторичной обмоткой (ротор трансформатора) на вращающейся ампуле. Между ферритами находится воздушный зазор 0.1 мм, который обеспечивает минимальные потери магнитной индукции.
188
Токоподвод |
Источник би- |
ДУ |
|
Токосъём |
|
|
|
||||
|
|
|
|
|
|
|
|
полярного |
Усилитель |
ПНЧ |
|
|
|
питания |
|
|
|
|
|
|
|
|
|
|
|
|
ДМ |
|
|
Uпит |
20 В, |
Вращающаяся система координат |
(100±50) кГц |
||
20 кГц |
|
||||
|
|
|
|
||
Рис. 5. Функциональная схема системы стабилизации угла |
|||||
|
|
чувствительного элемента |
|
||
Всвязи с применением трансформатора в цепи питания схемы используется переменное напряжение питания 20В, 20кГц. Частота питания была выбрана в соответствии с частотными свойствами трансформатора. Опытным путём была определена зависимость напряжения от частоты. По этим экспериментальным данным определена полоса пропускания трансформатора – от 5 кГц до 500 кГц. В соответствии
сэтим частота напряжения питания выбрана 20 кГц, а частота выходного информационного сигнала не должна превышать 200 кГц.
Для преобразования переменного напряжения в постоянное биполярное ±15В на вращающемся роторе реализован источник питания, который обеспечивает выпрямление и стабилизацию питающего напряжения.
Вмомент действия угловой скорости на ДУС сигнал с датчика угла (ДУ) усиливается в тысячу с лишним раз и подаётся на датчик момента (ДМ), который прикладывает к чувствительному элементу компенсирующий момент. Часть сигнала снимается с датчика момента и подаётся на преобразователь напряжения в частоту (ПНЧ), формирующий выходной информационный сигнал, частота которого пропорциональна действующей угловой скорости на гироскоп.
Входе испытаний гироскопического комплекта максимальная парируемая угловая скорость составила порядка 5÷6°/с. Увеличилась точность показаний прибора, а также благодаря применению элементов электронной техники в миниатюрных корпусах для поверхностного монтажа удалось существенно минимизировать площадь, занимаемую сервисной электроникой.
Инерциальная навигационная система (ИНС), построенная на базе МГ, имеет следующие преимущества перед аналогами:
− точность МГ в составе ИНС аналогична точности в автономном режиме, так как нет влияния магнитных и электромагнитных
189
полей. Также нет влияния «корпусного» дрейфа, так как съем информации идет во вращающейся системе координат;
−отсутствует взаимовлияние двух приборов и их влияние на маятниковые акселерометры вследствие уровня вибрации на два порядка меньшего, чем в аналогах.
Предлагаемую конструкцию модуляционного гироскопа целесообразно использовать в качестве чувствительного элемента двух-, трёх или четырёхосного индикаторного гиростабилизатора, решающего следующие задачи:
−создание на базе модуляционного гироскопа судового компаса с точностью 0,05°/ч с ресурсом 100 тыс. часов без тарировок и калибровок на весь срок эксплуатации;
−создание инерциальной системы ориентации, навигации для задач наземных объектов;
−создание инерциально-навигационного комплекса для морских объектов с погрешностью 1,8 мили за 24 часа работы;
−создание датчика угловой скорости для космических объектов с точностью 0,003°/ч без тарировок и калибровок с ресурсом работы 100 тыс. часов;
−создание на базе модуляционного гироскопа скважинного инер- циально-навигационногокомплексадлягоризонтальнойнефтегазодобычи;
−создание комплекса командных приборов летательных аппаратов с точностями 0,05°/ч, перегрузочной способностью 40 g, ресурсом работы 100 тыс. часов, без тарировок и калибровок на весь срок эксплуатации.
Библиографический список
1.Брозгуль Л.И. Динамически настраиваемые гироскопы: модели погрешностей для систем навигации / Л.И. Брозгуль. – М.: Машиностроение, 1989.
2.Волович Г.И. Схемотехника аналоговых и аналогоцифровых электронных устройств / Г.И. Волович. – М.: И Д «Додэка-XXI», 2005. – 528 с.
3.Вольдек А.И. Электрические машины: учебник для студентов высш. техн. учебн. заведений / А.И. Вольдек. – 3-е изд., перераб. – Л.: Энергия, 1978.
4.Воронов А.А. Основы теории автоматического регулирования и управления: учеб. пособие для вузов / А.А. Воронов [и др.]. – М.: Высшая школа, 1977.
190