

387
.pdfСИСТЕМЫ ТЕЛЕКОММУНИКАЦИЙ, ПРОМЫШЛЕННЫЕ АСУТП, АСНИ, САИ
УДК 681.3
С.В. Белковский
Пермский государственный технический университет
СИНТЕЗ СТРУКТУРЫ РАСПРЕДЕЛЕННОЙ АСУТП НА ОСНОВЕ МОДЕЛЕЙ АКТИВНЫХ СИСТЕМ
Предлагается модель синтеза структуры распределенных микроконтроллерных АСУТП с точки зрения теории активных систем. Интеллектуальный микропроцессорный узел рассматривается как активный элемент. Система АСУТП представляется как активная иерархическая система. Предлагается проводить синтез систем АСУТП как решение теоретико-игровой задачи распределения ресурса.
Успешная работа предприятий во многом зависит от качества выпускаемой продукции и высокой рентабельности производства. Одним из главных условий этого является комплексная автоматизация технологических процессов производства и, как следствие, сокращение доли ручного труда и увеличение качества продукции. Поэтому вопросы синтеза структуры систем автоматизации технологических процессов (АСУТП) являются актуальными.
Типовой процесс проектирования систем АСУТП состоит из следующих этапов [1, 7]:
1.Построение модели системы и ее формализация. Выделяются все функций АСУТП и алгоритмы, реализующие эти функции. Формируется модель системы управления, состоящая из набора взаимосвязанных функциональных задач в виде функциональной блоксхемы задач АСУТП.
2.Алгоритмизация модели системы и ее машинная реализация. Описывается обработка информационных потоков по всем входным
ивыходным каналам системы управления с помощью функциональных операторов.
3.Получение результатов моделирования и проверка на реальном технологическом процессе разработанной модели.
Врамках теории активных систем (АС) описание АС состоит из
следующих этапов [4, 5]:
192
1.Анализ допустимых множеств системы и функций полезности активных элементов системы (АЭ).
2.Задание процедуры устранения неопределенности.
3.Определение эффективности механизма стимулирования и формулировказадачисинтеза оптимальногомеханизма стимулирования.
4.Анализ ситуаций равновесия и стабильности равновесий.
5.Синтез структурыАС(втомчисле управляющих воздействий). Здесь под активным элементом понимаются объекты, которые
обладают свойством активности, свободой выбора своего состояния, а также собственными интересами и предпочтениями. АЭ выбирают свои состояния, которые являются наилучшими с точки зрения их предпочтений при заданных управляющих воздействиях, а управляю-
щие воздействия, в свою очередь, зависят от состояний управляемых |
|||
|
ui |
АЭ [5]. Активный элемент имеет цели, |
|
|
способен искажать информацию, а так- |
||
|
|
|
|
xi |
|
yi |
же работать с разной эффективностью, |
АЭi |
в соответствии со своими целями. |
||
|
|
Интеллектуальный микропроцес- |
|
|
|
|
|
|
|
|
сорный узел (ИУ) распределенной сис- |
Рис. 1. Структура ИУ как про- |
|||
стого активного элемента |
темы управления можно представить |
||
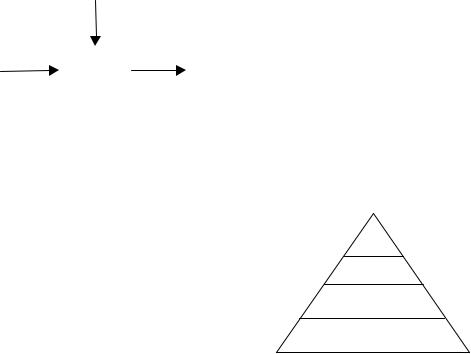
в виде активного элемента (рис. 1). Каждый ИУ имеет определенный объем постоянной и оперативной памяти и способен отрабатывать определенный алгоритм, характеризующий его поведение [3, 6].
Здесь xi = {xij, j = 1..n} – вектор состояний на входе, yi = {yij,j = 1..n} – вектор состояний на выходе, ui ={uij,j=1..n}
– векторуправления.
Структура современной интегрированной системы управления предприятием приведена на рис. 2 [2].
Устройства уровня Fieldbus или промышленных сетей осуществляют сбор информации с датчиков и управ-
ление исполнительными механизмами. Уровень MMI (Man Machine Interface, человекомашинный интерфейс) предоставляет услуги визуализации технологических процессов, а также осуществляет передачу
193
управляющих воздействий от оператора устройствам промышленной сети. Уровни Fieldbus и MMI образуют уровень автоматизации технологических процессов АСУТП. Системы АСУТП находятся, как правило, непосредственно на производстве.
Далее информация передается на верхний уровень, который об-
разуют системы MES (Manufacturing Execution System, Система управ-
ления производством), располагаемые в отделах технологов.
Затем информация поступает в системы ERP (Enterprise Resource Planning, Планирование ресурсов предприятия), находящиеся в финансовых отделах предприятия.
Соответственно, при движении информации сверху вниз MES-сис- темыполучаютданныеизERP-системы, например, отребуемыхобъемах и сроках производства и задают параметры работы операторов через MMI-системы. Системы MMI, в свою очередь, выдают уставки для работы технологического процесса на промышленные контроллеры, находящиеся наFieldbus-уровне.
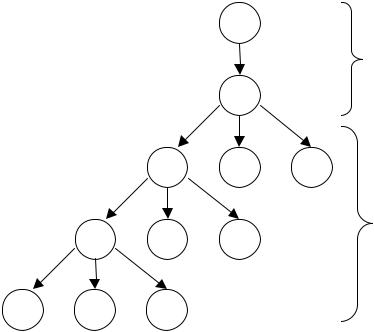
Исходя из этого, можно определить структуру современной системы управления предприятием в виде иерархической системы (рис. 3).
ERP
АСУП
MES
MMI1 |
… |
MMIn |
АСУТП
PLC1 |
… |
PLCm |
M1 |
… |
Mk |
Рис. 3. Структура ИАСУ в виде иерархической системы
194

Здесь PLC – программируемые контроллеры, M – модули удаленного сбора информации и управления.
Любая АС задается перечислением следующих параметров [4]: состав активной системы, структура АС, число периодов функционирования, целевые функции, допустимые множества состояний АЭ-системы, порядокфункционированияиинформированностьучастников.
Зададим модель активной системы как кортеж:
M = C, S, N, F, D, P, I ,
где соответственно С – состав активной системы, S – структура АС, N – число периодов функционирования, F – целевые функции, D – допустимые множества состояний АЭ-системы, P – порядок функционирования иI – информированность участников.
Для определения модели системы АСУТП как активной требуется определить указанные множества. Рассмотрим полевой уровень, состоящий из контроллеров и систем визуализации технологических процессов. Тогда состав системы С будет полностью определяться перечнем микропроцессорных узлов сети и компьютера с системой визуализации (SCADA).
Структура S будет определяться физическими связями между датчиками и контроллерами, контроллерами и исполнительными механизмами, связями контроллеров между собой и компьютером.
Примем число периодов функционирования N конечным, составляющим время работы технологического процесса.
Вкачестве целевых функций F возьмем время отработки задания. Это время будет зависеть от конфигурации сети.
Допустимые множества D определяются возможными комбинациями соединения узлов с датчиками и исполнительными механизмами, а также между собой и компьютером.
Примем, что порядок функционирования P – последовательный, а информированность участников I – полная.
Врамках теории активных систем задача управления рассматривается следующим образом [5]. Состояние системы описывается
переменной y A, принадлежащей допустимому множеству A. Состояние системы зависит в некоторый момент от управляющих воздействий u U:y = F(u). Эффективность функционирования системы определяет функционал Ф(u, y), заданный на множестве U×A. Величина K(u) = Ф(u,F(u)) называется эффективностью управления u U.
195
Вкачестве действий центра примем назначение узлам задач, для выполнения которых требуется определенная конфигурация сети.
Тогда задачу синтеза структуры АСУТП можно свести к теоре- тико-игровой задаче распределения ресурса. В качестве ресурса будет выступать глобальная задача управления. Агенту – интеллектуальному узлу выгодно использовать наиболее удачную для себя конфигурацию сети для доступа к датчикам и исполнительным устройствам.
Втеории активных систем выделяется несколько процедур распределения ресурса [5]: механизм пропорционального распределения ресурса и механизм последовательного распределения ресурса. Первый способ является самым распространенным и предполагает распределение ресурса пропорционально заявкам, второй – является прямым механизмом, когда каждого агента опрашивают о величине требуемого ресурса для решения задачи. Для нашего случая более удобным является вторая процедура распределения ресурса. Данный механизм имеет простой вид и для него просто посчитать равновесие.
Для решения задачи синтеза структуры АСУТП следует определить множества модели активной системы и выделить в глобальной задаче автоматизации ряд подзадач. Разбиение задачи на ряд подзадач может быть осуществлено методами классического распараллеливания алгоритмов.
196
Таким образом, применение теоретико-игрового подхода позволяет свести задачу синтеза АСУТП к решению соответствующей игры.
Библиографический список
Автоматизация проектирования систем управления / под ред. М. Джамшиди, Ч. Хергета Дж. – М.: Машиностроение, 1989.
Автоматика и автоматизация производственных процессов / под ред. Г.К. Нечаева. – Киев: Вища школа, 1985.
Белковский С.В. Информационная модель синтеза структуры распределенных АСУТП на основе промышленной сети / С.В. Белковский, Р.А. Файзрахманов // Информационные управляющие системы: сб. науч. тр.; Перм. гос. техн. у-т. – Пермь, 2005. – С. 240–244.
Бурков В.Н. Основы математической теории активных систем /
В.Н. Бурков. – М.: Наука, 1977. – 255 с.
Бурков В.Н. Теория активных систем: состояние и перспективы / В.Н. Бурков, Д.А. Новиков. – М.: СИНТЕГ, 1999. – 128 с.
Низамутдинов О.Б. Модель размещения распределенных управляющих устройств / О.Б. Низамутдинов, С.В. Белковский // Молодежная наука Прикамья: сб. науч. тр.; Перм. гос. техн. у-т. – Пермь, 2003. – Вып. 3. – С. 24–27.
Шенброт И.М. Проектирование вычислительных систем распределенных АСУТП / И.М. Шенброт, В.М. Алиев. – М.: Энергоатомиздат, 1989.
Принято 25.01.07
197
УДК 681.3
С.В. Белковский
Пермский государственный технический университет
МОДЕЛЬ РАСПРЕДЕЛЕННОЙ МИКРОКОНТРОЛЛЕРНОЙ СЕТИ
Рассматриваются распределенные микроконтроллерные системы АСУТП. Выделяются их преимущества по сравнению с централизованными системами управления. Предлагается расширение базовой модели распределенной АСУТП в плане технического обеспечения.
Рост объемов промышленного производства и увеличение сложности технологических процессов требуют все более эффективных систем управления.
На первом этапе автоматизации управление осуществлялось в ручном режиме. Системы были централизованными по территориальному признаку. Большая стоимость этих систем требовала максимальной их загрузки и реализации достаточно сложных алгоритмов управления. Как правило, подобные системы реализовывались для конкретных целей. Это не позволяло наиболее полно использовать оборудование и объединять несколько систем автоматизации в одну. Более того, создание нового типа оборудования приводило к необходимости полной замены старой или создания новой автоматизированной системы [1].
Существенное снижение стоимости микроконтроллеров в 80-х годах прошлого века показала экономическую несостоятельность традиционных систем АСУТП. Создаются системы распределенного контроля и управления на основе промышленных микроконтроллерных систем. Объединяя датчики и исполнительные механизмы, используя единый протокол связи по одной последовательной шине данных, такие системы используют интеллектуальные узлы-контроллеры для децентрализованнойобработкиданных.
Распределенные микроконтроллерные системы управления имеют много преимуществ перед централизованными системами. Стои-
198
мость проводников и расходы на их прокладку в распределенных системах значительно ниже, так как требуется проложить всего одну линию связи, а в отдельных случаях можно обойтись уже существующей. Кроме того, сокращается количество необходимого оборудования. Благодаря совместимости устройств изготовителей друг с другом увеличивается возможность выбора поставщиков оборудования, что позволяет выбрать приемлемый по цене вариант системы.
Распределенные системы обладают повышенной надежностью. Функции одного устройства может взять на себя другое. Централизованная же система прекращает работать, если не функционирует центральное устройство.
При проектировании централизованной системы разработчику необходимо ориентироваться на централизованное и комплексное применение алгоритмов. Децентрализованная система реализует во многих случаях простые алгоритмы и приемлемые по цене конфигурации системы. Тем более что в большинстве случаев фирмы-производители предлагают уже готовые решения для каждого конкретного типа узлов. Также снижается нагрузка на помещения контроля и управления. Количество оборудования, устанавливаемого в них, сокращается.
Возможность передачи в распределенных системах по одной линии в цифровом виде большого количества данных позволяет получать больше информации за определенный интервал времени и увеличивает помехозащищенность системы. Также преимущества полностью цифровой связи состоит в обеспечении поступления большего количества доступной информации не только о состоянии процесса управления, но и о состоянии самой системы (например, датчиков
вагрессивной среде).
Вотличие от централизованной системы, децентрализованная представляет собой параллельную систему, в которой основная обработка информации происходит на местах, а верхние уровни системы получают только данные о качественных состояниях процесса. Таким образом, достигается большая производительность.
Наконец, распределенные системы легки в установке, сопровождении и диагностике. Эти этапы занимают гораздо меньше времени ввиду большей гибкости системы и наличия развитых средств отладки и диагностики систем полевых шин. В децентрализованных распределенных системах стало возможным решение задач любой сложности, выделяя для ее решения необходимый набор аппаратных средств.
199
Формально, в литературе распределенная АСУТП рассматривается как кортеж [2, 3]
L = <Z, E, O, U, T, K, Q, П>,
где Z – множество задач, решаемых распределенной АСУТП; E – мно- жество технических средств; O – множество операционных сред; U – множество управляющих вычислительных комплексов; T – множество топологий сети; K – множество физических сред передачи данных; Q – множество технических сред передачи данных; П – множество сетевых программных обеспечений.
Уточним множества данной модели, касающиеся технической части микроконтроллерной системы. Множество управляющих вычислительных комплексов
E = <S, A, N>,
где S – множество датчиков, A – множество устройств управления, N – множество дополнительных технических средств.
Каждый узел характеризуется следующим набором параметров:
U = <M, P, C>,
где M – множество объемов памяти, P – множество быстродействия, С – множество портов ввода-вывода.
Соответственно, портыввода-выводамогутбытьпредставленыкак
С = <B, D, F>,
где B – множество вариантов портов ввода (аналоговые, цифровые и другие), D – множество вариантов портов вывода (аналоговые, цифровые и другие), F – множество коммуникационных портов.
Множество топологий сети запишется как
T = <V, H, I, J>,
где V – множество скоростей работы, H – множество видов арбитража, I – дальность одного сегмента сети, J – число узлов в одном сегменте сети.
Тогда задача выбора микроконтроллерных средств может быть представлена как задача согласования портов с датчиками и исполнительными механизмами, топологией сети, а также выбора памяти и быстродействия для решения конкретных задач.
Z × S × A × M × P × B × D × F × T → U.
Проектируемая АСУТП должна быть обозрима и ограничена в функциях, что будет говорить о наблюдаемости и управляемости
200