

387
.pdf−ячейка № 11 – измерительный трансформатор напряжения НТМИ-6;
−ячейка № 13 – РУ–6 кВ УПСВ, суммарная нагрузка КТП мощностью 2173 кВА;
К секции шин 6 кВ № 2 подключены:
−ячейка № 17 – суммарная нагрузка КТП мощностью 400 кВА;
−ячейка №18 – РУ–6 кВ ГКС суммарная нагрузка мощностью
2040 кВА;
−ячейка № 19 – суммарная нагрузка КТП мощностью 1350 кВА;
−ячейка № 20 – измерительный трансформатор напряжения НТМИ–6;
−ячейка № 23 – КНС-1101: Электродвигатель № 2.1 СТД-800 800 кВт;
−ячейка № 24 – суммарная нагрузка КТП мощностью 1570 кВА;
−ячейка № 25 – КНС–1101: Электродвигатель № 2.2 СТД-800 800 кВт;
−ячейка № 26 – суммарная нагрузка КТП мощностью 814 кВА;
−ячейка № 27 – суммарная нагрузка КТП мощностью 5150 кВА; От секций шин 6 кВ № 1 ПС «Уньва», через ячейки № 7 и № 13,
осуществляется питание распределительного устройства (РУ) 6кВ УПСВ «Уньва».
К секциям шин № 1 РУ–6 кВ подключены:
−ячейка №1 – Электродвигатель №1 ВАО-450М-4У2 250 кВт;
−ячейка №2 – Электродвигатель №2 ВАО-450М-4У2 250 кВт; К секциям шин № 2 РУ-6 кВ подключены:
−ячейка №10 – Электродвигатель №1 ВАО-450М-4У2 250 кВт. Основной причиной нарушения нормального режима работы
системы электроснабжения (СЭС) является возникновение КЗ в сети или элементах электрооборудования вследствие повреждения изоляции или неправильных действий обслуживающего персонала. Для снижения ущерба, обусловленного выходом из строя электрооборудования при протекании токов КЗ, а также для быстрого восстановления нормального режима работы СЭС, необходимо правильно определять токи КЗ и по ним выбирать электрооборудование, защитную аппаратуру и средства ограничения токов КЗ.
Для проверки уставок существующих релейных защит и противоаварийной автоматики оборудования и воздушных линий 35–6 кВ
171
ПС «Уньва» произведен расчёт токов короткого замыкания согласно ГОСТ 27514–87 «Короткие замыкания в электроустановках. Методы расчёта в электроустановках переменного тока напряжением свыше 1 кВ» и РД 153–34.0–20.527–98 «Руководящие указания по расчёту токов короткого замыкания и выбору электрооборудования».
Места расположения точек КЗ выбирают таким образом, чтобы при КЗ проверяемое электрооборудование, проводники находились, в наиболее неблагоприятных условиях. Например, расположение точек КЗ при расчётах релейной защиты определяют по ее назначению – в начале иликонце защищаемого участка.
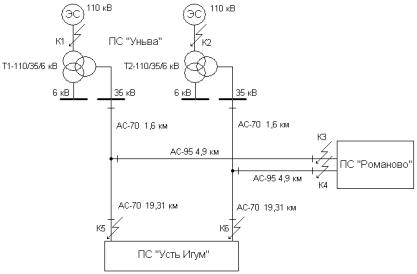
Приведем пример расчета токов короткого замыкания в конце участка воздушных линий 35 кВ на шинах 35 кВ ПС 35/6 «Усть-Игум» и ПС 35/6 «Романово» в точках К3, К4, К5, К6 согласно схеме и исходным данным, изображенным на рисунке.
Рис. Схема воздушных линий 35кВ ПС «Уньва»
При проведении расчетов для наглядности и удобства строится схема замещения, в которой все участки системы электроснабжения заменяются эквивалентными сопротивлениями.
1.Ток трёхфазного короткого замыкания на шинах 110 кВ ПС «Уньва» точки К1 и К2 взят из расчётов отдела РЗиА Березниковских электрических сетей Imax = 3700 А.
2.При расчёте токов КЗ в эксплуатационной практике общепринятым является расчёт в относительных (базисных) единицах. При
172
использовании этого способа большинство расчётных выражений имеет простую структуру, поэтому можно быстро определить вычисляемые величины. Для удобства расчетов выбираем базисное напряжение Uб = 6300 В.
3. Производим расчет полного сопротивления Z участка до места короткого замыкания.
ZК3,К4 = ZЭС+ZТР+ZВЛ К3,К4 = 0,049+0,269+0,101 = 0,419 Ом, ZК5,К6 = ZЭС + ZТР + ZВЛ К5,К6 = 0,049+0,269+0,364 = 0,682 Ом, ZЭС – полное сопротивление внешней энергосистемы,
ZЭС = xc = |
UБ2 |
63002 |
|
3 |
= |
= 0,049 Ом, |
|
|
IК |
3 3700 115000 |
|
ZТР − полноесопротивление силового трансформатора 110–35 кВ,
ZТР = XВН+XСН = 0,264+0,05 = 0,269 Ом,
ZВЛ − полное сопротивление участка воздушной линий 35 кВ до места короткого замыкания.
ZВЛ К3,К4 = z1,6+ z4,9=0,028+0,073 = 0,101Ом, ZВЛ К5,К6 = z1,6+z19,3=0,028+0,336 = 0,364 Ом,
ВЛ 1,6 км АС-70: x |
|
= x |
|
l UБ2 |
|
= 0,42 1,6 |
|
63002 |
|
= 0,019 Ом; |
|||||||||||||||||
|
|
|
|
|
1,6 |
|
|
|
|
|
0 |
|
|
Uср2 |
|
|
|
|
|
|
375002 |
|
|||||
|
|
|
|
r |
= r l |
|
UБ2 |
|
|
= 0,451,6 |
|
63002 |
|
|
= 0,020 Ом; |
||||||||||||
|
|
|
|
Uср2 |
|
|
|
|
|||||||||||||||||||
|
|
|
|
1,6 |
0 |
|
|
|
|
|
|
|
|
375002 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
z |
1,6 |
= |
|
x 2 + r 2 |
|
= 0,028 |
|
|
Ом. |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1,6 |
|
1,6 |
|
|
|
|
|
|
|
|
|||||
ВЛ 4,9 км АС-95: x |
|
= x |
|
l UБ2 |
|
= 0,41 4,9 |
|
63002 |
|
= 0,057 Ом; |
|||||||||||||||||
|
|
|
|
|
4,9 |
|
|
|
|
|
0 |
|
|
Uср2 |
|
|
|
|
|
|
375002 |
|
|||||
r |
= r |
l |
UБ2 |
= 0,33 4,9 |
|
63002 |
|
= 0,046 Ом; |
|
|
|||||||||||||||||
4,9 |
0 |
|
Uср2 |
|
|
|
|
|
|
|
|
375002 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
z |
4,9 |
|
= |
x2 |
+ r2 |
= 0,073 Ом. |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4,9 |
|
4,9 |
|
|
|
|
|
|
|
|
|||
ВЛ 19,31 км АС-70: |
x |
|
|
|
|
|
= x l |
|
UБ2 |
= 0,42 19,31 |
63002 = 0,229 Ом; |
||||||||||||||||
|
|
|
|
|
|
|
19,31 |
|
|
|
|
0 |
|
Uср2 |
|
|
|
|
375002 |
||||||||
|
|
|
r |
|
= r l |
|
UБ2 |
|
|
= 0,45 19,31 63002 = 0,245 Ом; |
|||||||||||||||||
|
|
|
19,31 |
0 |
|
|
|
Uср2 |
|
|
|
|
|
|
|
|
375002 |
|
|
||||||||
|
|
|
|
|
|
z |
|
|
|
|
|
= |
|
x2 |
|
+ r2 |
|
|
= 0,336 Ом. |
|
|
||||||
|
|
|
|
|
|
|
19,31 |
|
|
|
|
19,31 |
19,31 |
|
|
|
|
|
|
||||||||
173
Ток трехфазного короткого замыкания для точек К3 и К4
Iкз(3),К3,К4 |
= |
UБ |
× UБ = |
6300 |
× |
6300 |
=1458 А. |
|
3 |
ZК3,К4 |
Uср |
1,732 0,419 |
|
37500 |
|
где UБ – коэффициент приведения к ступени напряжения 35 кВ.
Uср
Ток двухфазного короткого замыкания для точек К3 и К4
Iкз(2),К3,К4 = |
3 |
Iкз(3),К3,К4 = 0,87 1458 =1263 А. |
|
2 |
|
Ток трехфазного короткого замыкания для точек К5 и К6
Iкз(3),К5,К6 |
= |
UБ |
× UБ = |
6300 |
× |
6300 |
= 896 А. |
|
3 |
ZК5,К6 |
Uср |
1,732 0,682 |
|
37500 |
|
Ток двухфазного короткого замыкания для точек К5 и К6
Iкз(2),К5,К6 = |
3 |
Iкз(3),К5,К6 = 0,87 896 = 776 А. |
|
2 |
|
Аналогичным образом на схеме воздушных линии 6кВ расставлены точки короткого замыкания и проведен расчет токов в этих точках. На основании расчёта токов короткого замыкания далее выполняется отстройка уставок релейной защиты подстанции. Кратко опишем основные типы защит, существующие на подстанции и принципы их отстройки
1. Защита силовых трансформаторов 110/35/6 кВ:
−дифференциальная защита трансформаторов Т1,Т2 реализована на реле ДЗТ-11, ток срабатывания защиты рассчитывается из условия отстройки от броска тока намагничивания и от расчетного тока небаланса при внешнем КЗ;
−защита от перегрузки трансформаторов Т1, Т2, отстройка по превышению номинального тока трансформатора с выдержкой времени;
−максимально токовая защита для защит трансформаторов Т1,Т2, на вводах 6 кВ и 35 кВ отстраивается от суммарного рабочего тока двух секций шин № 1, № 2. Максимально токовая защита на СМВ 6 кВ и 35 кВ отстраивается от максимального суммарного рабочего тока одной из секции шин.
2. Защиты отходящих фидеров 6 кВ.
Защиты отходящих фидеров, максимально токовая защита и токовая отсечка на линиях выполнены на реле РТ-40 и РТ-85:
174
−максимально токовая защита для защиты линий на ячейках отстраивается от максимального рабочего тока нагрузки на соответствующей линии подстанции;
−токовая отсечка для защиты линий на ячейках отстраивается от тока КЗ в конце линии, соответствующей линии подстанции;
−защита от перегрузки двигателей отстраивается от рабочего тока двигателя;
−токовая отсечка для защиты двигателей отстраивается от максимального пускового тока двигателя;
−защита по минимальному напряжению двигателей отстраивается от рассчитанного остаточного напряжения на шинах 6кВ при запуске двигателя.
3.Защиты отходящих фидеров 35 кВ.
Защиты отходящих фидеров, двухступенчатая максимальная токовая защита и токовая отсечка выполнены на реле РТ-40:
−2-ступенчатая максимально токовая защита, для защиты линий
№1, № 2. 1-я ступень – токовая отсечка с выдержкой времени отстраивается от двухфазного тока КЗ на шинах 6 кВ ПС «Усть-Игум», 2-я ступень отстраивается от максимального рабочего тока линии;
−токовая отсечка, для защиты линий № 1, № 2 отстраивается от трехфазного тока КЗ в конце линии точки К5, К6 (см. рисунок)
Также в рамках исследовательской работы проводился расчет уставок противоаварийной автоматики АПВ и АВР, в данной статье мы его не рассматриваем.
Анализ схем электроснабжения подстанции, подстанционного оборудования и результатов расчёта токов короткого замыкания и уставок релейной защиты и автоматики выявил следующие недостатки системы электроснабжения ПС «Уньва».
1. Мощность потребителей подстанции в аварийном режиме работы при выходе из строя одного силового трансформатора превышает номинальную мощность трансформатора. При этом коэффициент загрузки трансформатора равняется 1,7.
2. К ячейкам № 10 и 13 на достаточно протяженных воздушных линиях подключена нагрузка, мощность которой не позволяет достичь требуемого по ПУЭ коэффициента чувствительности максимальной защиты.
В качестве рекомендаций по устранению выявленных недостатков были предложены следующие варианты.
175
1.Проблема перегрузки трансформаторов может быть решена путём снижения потребляемой мощности электроприёмников, подключённых к эксплуатируемым КТП 6/0,4 кВ. Однако, при возможном увеличении загрузки как существующих, так и вновь вводимых в эксплуатацию потребителей потребуется увеличение пропускной мощности ПС «Уньва» (трансформаторов, ЛЭП, коммутационного и шинного оборудования).
2.Проблема увеличения чувствительности максимальной токовой защиты линий на ячейках № 10 и 13 может быть решена секционированием линии электропередач.
Взаключение хотелось бы отметить, что для повышения надёжности работы системы электроснабжения ПС «Уньва» в аварийных ситуациях рекомендуется замена аппаратных аналоговых электромеханических устройств релейной защиты на современные микропроцессорные средства, которые обладают высокой точностью измерений, множеством встроенных функций и возможностью интеграции с более высоким уровнем систем управления с использованием стандартизированных протоколов.
Получено 25.01.2007
176
УДК 621.315
А.Е. Терлыч, Н.М. Труфанова, А.Г. Щербинин
Пермский государственный технический университет
СПОСОБ ИДЕНТИФИКАЦИИ МОДЕЛИ В АДАПТИВНОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЕ УПРАВЛЕНИЯ ПРОЦЕССОМ ЭКСТРУЗИИ ПОЛИМЕРОВ
Рассматривается метод адаптации автоматизированной системы управления процессом экструзии с использованием упрощенной модели и способ структурной и параметрической идентификации данной модели.
В компьютерных математических моделях экструзионного процесса, работающих в режиме реального времени в автоматизированных системах управления, существует проблема получения информации о реологическом поведении и теплофизических характеристиках перерабатываемого полимера [1]. Это связано с тем, что указанные характеристики, в особенности реологические, могут существенно изменяться не только у материалов разных производителей, но и от партии к партии материалов одного производителя.
Таким образом, задача управления процессом экструзии сопряжена с недостатком информации о характеристиках объекта и возмущениях, действующих на объект. В связи с этим необходимо, чтобы система управления в процессе эксплуатации сама автоматически получала и использовала для выработки требуемых управляющих воздействий недостающую информацию.
В силу существенного влияния реологических характеристик перерабатываемого полимера на процесс в целом, для адекватного отображения процесса математическая модель нуждается в регулярной актуализации информации о реологии полимера. По сути дела, необходимо производить определение реологических характеристик полимера в режиме реального времени, что требует дорогостоящего специализированного лабораторного оборудования. Подавляющее большинство кабельных предприятий таким оборудованием не
177
располагает, ограничиваясь предварительным контролем перерабатываемого полимера только по показателю текучести расплава.
Определять реологическое поведение полимера в режиме реального времени оказывается возможным без использования специализированного лабораторного оборудования с использованием компьютерной математической модели, решая задачу по восстановлению реологических характеристик по выходным характеристикам объекта.
Наиболее часто на практике для описания реологического поведения полимера используется степенной закон
I2 |
|
n−1 |
|
|
|
2 |
|
|
|||
= 0 exp(− β(T −T0 )) |
|
|
|
, |
(1) |
2 |
|
||||
|
|
|
|
|
|
где µ – эффективная вязкость; µ0 – начальная вязкость; β – температурный коэффициент; I2 – второй инвариант тензора скоростей деформаций; n – показатель аномалии вязкости.
Таким образом, реологическое поведение полимера может описываться тремя константами: µ0 , β, n .
В итоге решение задачи по восстановлению реологических характеристик можно свести к решению системы нелинейных уравнений
Pи = Ф1 (µ0 , n,β, N ) |
|
|
|
|
|
|
|
Tи = Ф2 (µ0 , n,β, N ) |
, |
(2) |
|
|
|
||
Qи = Ф3 (µ0 |
, n,β, N ) |
|
|
Nи = N
где Pи – измеренное значение давления расплава полимера на выходе из экструдера; Tи – измеренное значение температуры расплава на выходе; Qи – измеренный массовый расход; Nи – измеренное значение скорости вращения шнека; Ф1 , Ф2 , Ф3 – операторыупрощенноймодели.
Необходимость упрощения модели связана с тем, что компьютерная математическая модель обладает значительной вычислительной емкостью, которая не позволяет производить численное решение
(2) в режиме реального времени.
Поскольку модель может быть адекватна процессу только в некотором смысле, а вместо точного значения откликов P, T, Q прихо-
дится иметь дело с некоторыми их приближениями Pи, Tи, Qи , то ре-
178

шения данной системы в классическом смысле может и не существовать, оно может быть не единственным и быть не непрерывным, т.е. не устойчивым к ошибкам.
Такая задача является некорректно поставленной задачей. Так как точное решение задачи невозможно, то ставится задача о нахождении приближенного в некотором смысле решения. Это не делает задачу корректной, однако аппарат решения некорректных задач на сегодняшний день хорошо развит.
Решение задачи (2) оказывается возможным проводить в реальном времени в силу её невысокой вычислительной емкости и получать текущие значения реологических свойств перерабатываемого полимера. Это позволяет сделать модель более адекватной процессу и адаптировать систему управления к изменению случайных неконтролируемых воздействий, существенно влияющих на процесс.
Структурная идентификация модели (определение вида операторов Ф1 , Ф2 , Ф3 ) может быть проведена, при заданном критерии
адекватности, на основе данных, полученных в результате численных экспериментов с использованием сложной компьютерной математической модели, например [2, 3], либо на основе натурных экспериментов
вшироком диапазоне значений входных параметров.
Вкачестве критерия адекватности можно использовать
∆ = max |
|
y − yм |
|
, |
(3) |
|
|
||||
где y – экспериментальное значение выходного параметра; |
yм – зна- |
||||
чение модели, или дискретную норму среднеквадратического приближения
σ = |
1 |
n |
2 |
(4) |
|
∑(yi − yмi |
) . |
||
|
n i =1 |
|
|
|
Модель считается адекватной, если выполняется условие |
|
|||
∆ ≤ ε1 , или σ ≤ ε2 , |
(5) |
|||
где ε1 и ε2 – заданные положительные числа.
Степень аппроксимирующего полинома выбирается из условия минимума σ или ∆ . Уменьшение ошибки модели можно достичь путем увеличения степени полинома. Однако с некоторого момента при повышении степени среднеквадратическая ошибка вместо того чтобы
179
уменьшаться, может возрастать из-за искажения результатов измерения выхода неконтролируемыми помехами. Кроме того, увеличение степени полинома приводит к увеличению затрат на параметрическую идентификацию и для степеней выше 3 теряет практический смысл.
Так, при использовании 4-квадратичного полинома минимальное количество экспериментальных данных должно быть ≥15 .
ϕ = α +α |
µ+α |
n +α β+α |
N +α |
µ2 +α |
n2 +α β2 |
+α |
N 2 + |
|
||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
+ α10µn + α11µβ+ α12µN + α13nβ + α14nN + α15βN. |
(6) |
|||||||||
Значения коэффициентов полинома можно определить, используя метод наименьших квадратов. Для этого (6) представляется ввиде
ϕ = α1z1 + α2 z2 +... + αk zk , |
(7) |
где z j – фактор, представляющий собой функциональную зависи-
мость произвольного вида от независимых переменных, k – количество факторов в эмпирическом уравнении.
Таким |
образом, |
|
|
|
|
|
|
|
|
|
|||
z |
=1, |
z |
2 |
= µ, z |
3 |
= n , z |
4 |
= β, z |
5 |
= N , z |
6 |
= µ2 … z = βN. |
(8) |
1 |
|
|
|
|
|
|
15 |
|
|||||
Требуется подобрать α1 , α2 … αk так, чтобы сумма квадратов
отклонений, рассчитанных по (7), и экспериментальных значений функции была минимальной. После преобразований получается система линейных алгебраических уравнений:
|
m |
m |
|
|
∑ z12p |
∑ z2 p z1p ... |
|
|
p=1 |
p=1 |
|
|
m |
m |
... |
|
∑ z1p z2 p |
∑ z22p |
|
p=1 |
p=1 |
. |
|
|
. |
. |
|
|
m |
m |
|
|
∑ z1p zk p |
∑ z2 p zk p ... |
|
|
|
p=1 |
|
p=1 |
|
||
m
∑ zk p z1p p=1
m
∑ zk p z2 p p=1
.
m
∑ zk2 p p=1
|
|
|
|
m |
|
|
α1 |
|
|
∑ϕp z1p |
|
|
p=1 |
||||
|
α |
2 |
|
m |
|
|
|
|
= |
∑ϕp z2 p |
|
|
|
|
|
p=1 |
|
|
|
|
|
|
|
|
αk |
|
m |
||
|
|
|
|
∑ϕp zk p |
|
|
|
|
|
p =1 |
|
|
|
|
|
||
(9)
Так как размер системы невелик ( k = 15 ), для решения системы удобно использовать метод Гаусса.
Параметрическая идентификация модели проводится по схеме, приведенной на рис. 1.
Идентификация производится следующим образом. Подбирается ряд полимеров с различными реологическими характеристиками, значения которых заранее определяются при помощи лабораторных
180