

Курсовое проектирование по теории механизмов и механике систем машин
..pdfФункция положения в матричной форме имеет такой вид:
ρ(0)D = ρ(0)D (φ10 , z21, φ32 ),
ρ(0)D =T10 , T21, T32 , ρ(3)D ,
где
|
x(0) |
|
|
|
|
cos φ |
|
|
–sin φ |
|
|
|
0 |
|
0 |
|
|
|
1 |
0 |
0 |
0 |
|
|
|||||||
|
D |
|
|
|
|
|
|
10 |
|
|
|
|
10 |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
||||
ρ(0) |
y(0) |
|
; |
T |
= |
sin φ |
|
|
cos φ |
|
|
|
0 |
|
; T |
|
= |
1 |
0 |
0 |
|
; |
|||||||||
= D |
|
|
|
10 |
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
z21 |
|
|||||||||
D |
zD(0) |
|
|
10 |
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
1 |
|
0 |
21 |
|
0 |
0 |
1 |
|
|
||||
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 0 1 |
|
|
||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 1 |
|
|
|
0 |
|
|
|||||||||
|
|
|
|
|
1 |
|
0 |
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|||
|
|
T |
= |
0 |
|
cos φ |
|
|
–sin φ |
|
|
|
l |
|
|
ρ(3) = |
l |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
32 |
|
|
|
|
32 |
|
|
BC ; |
|
CD . |
|
|
|
|
|||||||||||
|
|
|
32 |
|
0 |
|
sin φ32 |
cos φ32 |
|
|
0 |
|
D |
|
|
|
0 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Последовательным умножением матрицы приводят к равенству |
|
||||||||||||||||||||||||||||||
|
|
|
|
x(0) |
|
–l |
BC |
sin φ |
|
−l |
|
sin φ cos |
φ |
32 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
D |
|
l |
|
|
10 |
|
|
CD |
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
y(0) |
BC |
cos φ |
|
+l |
|
cos φ cos |
ϕ |
|
|
, |
|
|
|
|
|
||||||||||||
|
|
|
|
|
D |
|
= |
|
10 |
|
|
CD |
|
|
|
10 |
|
32 |
|
|
|
|
|
|
|||||||
|
|
|
|
z(0) |
|
|
|
|
|
z |
21 |
+l |
|
sin φ |
32 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
следовательно, искомые координаты точки D в неподвижной системе Ох(0) y(0) z(0) будут следующими:
xD(0) = –lBCsin ϕ10 −lCDsin ϕ10cos ϕ32 , yD(0) = lBCcos ϕ10 +lCDcos ϕ10cos ϕ32 ,
zD(0) = z21 +lCDsin ϕ32.
С помощью зависимостей, имея заданный диапазон изменения координат точки D, можно подобрать нужные значения длин звеньев lВС, lCD и диапазоны изменения обобщенных координат ϕ10, z21 и ϕ32.
Скорость движения схвата и отдельных звеньев манипулятора определяется не только характером рабочего процесса, но и условиями безопасности для обслуживающего персонала. Если зависимости обобщенных координат от времени известны, то скорости можно найти дифференциро-
81
Стр. 81 |
ЭБ ПНИПУ (elib.pstu.ru) |

ванием по времени функции положения. Например, для рассмотренного манипулятора с тремя степенями свободы при заданных зависимостях
ϕ10(t), z21(t) и ϕ32(t) проекции вектора скорости точки D схвата на оси координат получим, дифференцируя выражения:
VDõ = xD(0) = –ω1cos φ10 (lBC +lCDcos φ32 ) + ω32lCDsin φ10 sin φ32 , VDy = yD(0) = –ω1sin φ10 (lBC +lCDcos φ32 ) −ω32lCDcos φ10sin φ32 ,
VDz = zD(0) =V21 + ω32lCDcos φ32.
Величину и направление вектора скорости точки D найдем по формулам:
V = |
V 2 |
+V 2 |
+V 2 |
, cos α = VDx , |
|||
D |
Dx |
|
Dy |
|
Dz |
|
VD |
|
|
|
|
|
|
|
|
|
|
|
VDy |
|
, cos γ = |
V |
|
|
cos β = |
|
|
Dz . |
|||
|
V |
|
|||||
|
|
|
|
|
|
V |
|
|
|
|
D |
|
|
|
D |
где α, β, γ – направляющие углы вектора скорости.
4.8. ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД КИНЕМАТИЧЕСКОГО
ИССЛЕДОВАНИЯ РЫЧАЖНЫХ МЕХАНИЗМОВ
Графоаналитический метод, или метод планов, основан на элементах векторной алгебры. При кинематическом исследовании составляются векторные уравнения для скоростей или ускорений механизма в данном положении. Полученные уравнения решаются графически в порядке присоединения структурных групп к ведущему звену и к стойке. Метод планов применяют тогда, когда имеется схема механизма в данном положении. Рассмотрим примеры применения графоаналитического метода.
4.8.1. Определение предельных положений механизма (графический метод)
Решение задачи начинают с определения предельных положений механизма, когда рабочий орган механизма занимает крайнее положение. Рассмотрим способы, пользуясь которыми можно в зависимости от типа механизма найти предельные положения.
82
Стр. 82 |
ЭБ ПНИПУ (elib.pstu.ru) |

Для шарнирного четырёхзвенника (рис. 4.11, а, б) предельные положения коромысла 3 будут тогда, когда кривошип 1 и шатун 2 располагаются на одной прямой. Из точки А в масштабе радиуса кривошипа, а из точки D радиусом коромысла проводим окружности. Затем из А проводим засечки длинами АВ+ВС и ВС–АВ до пересечения с траекторией коромысла в точках С1 и С2. Полученные точки С1 и С2 соединяем с точкой А отрезками, пересекающими окружность кривошипа в точках В1 и В2. Положение механизма, соответствующие схемам AB1C1D и AB2C2D – предельные (рис. 4.11, б).
Pис. 4.11. Шарнирный четырёхзвенник:
а– кинематическая схема шарнирного четырёхзвенника;
б– крайние положения шарнирного четырехзвенника
83
Стр. 83 |
ЭБ ПНИПУ (elib.pstu.ru) |
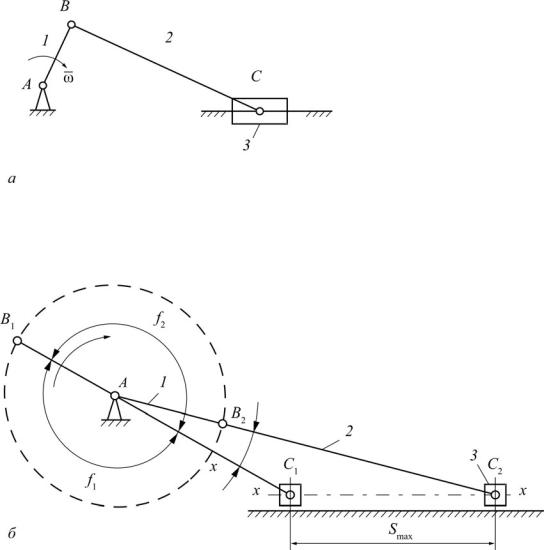
Методика определения крайних положений для кривошипно-пол- зунного механизма (рис. 4.12) аналогична той, которая рассмотрена выше.
Для механизма с качающейся кулисой определение предельных положений начинают с построения окружности кривошипа 1 с центром в точке А. Затем проводятся две касательные к этой окружности из точки D – центра качения кулисы 3. Эти прямые и характеризуют схемы AB1D и AB2D механизма, соответствующие двум крайним положениям
(рис. 4.13).
Рис. 4.12. Кривошипно-ползунный механизм:
а– кинематическая схема кривошипно-ползунного механизма;
б– крайние положения кривошипно-ползунного механизма
84
Стр. 84 |
ЭБ ПНИПУ (elib.pstu.ru) |

Рис. 4.13. Кулисный механизм: а – кинематическая схема механизма; б – крайние положения механизма
Для более сложных стержневых механизмов крайние положения определяют исходя из конкретной схемы с учётом способов, изложенных выше.
4.8.2. Построение плана положений механизма
Построение плана положений механизма проводится в определённом масштабе µl. Масштаб схемы характеризует отношение длины (м) входного звена к отрезку плана положений (мм), соответствующего этому звену.
Например, µl = ℓОА / (ОА), м/мм.
Рекомендуется масштаб выбирать простым числом, чтобы с ним удобно было проводить вычисления. Выбрав масштаб, определяют длины отрезков схемы, соответствующие остальным звеньям. Например,
ВС = ℓВС /µl, мм, CD = ℓcd / µl, мм и т.д.
После выбора масштаба строятся крайние положения механизма, одно из которых принимается за начальное, соответствующее началу ра-
85
Стр. 85 |
ЭБ ПНИПУ (elib.pstu.ru) |
бочего хода. Таким образом, за нулевое положение (начало отсчёта) принимается положение кривошипа, соответствующее начальному.
Построение всех текущих положений механизма ведётся в порядке присоединения структурных групп методом засечек в соответствии с направлением движения ведущего звена. На рис. 4.14 изображена схема кулисного механизма в 12 положениях в масштабе µl.
Системой координат S–f строим систему координат V0 f c тем же расположением положений f1, f2 и т.д. На оси f левее O откладывается отрезок H1 произвольной величины. При этом следует учесть, что чем больше H1, тем больше величины ординат диаграммы Vf1 = ĩ (f1). Из точки O1 проводим лучи O1 – 1', O1 – 2', O1 – 3' и т.д., параллельные хордам 1 т.д. Проведённые лучи отсекают на оси ординат отрезки O – 1', O – 2', O – 3' и т.д., величины которых откладываются по вертикали из середин отрезков 0–1, 1–2, 2–3 и т.д. оси Of. Соединив полученные точки плавной кривой, получают график скорости точки (рис. 4.15, б). Масштаб скорости и его аналога
µV = (µS/H1 · µf) ω1 = µS/µt · H1;
µVf = µS / H1 · µf.
Имея график Vf = V (f), можно найти значение скорости в любом положении кривошипа. Например, для 5-го положения
VE5 = µV × (y5).
Аналогичным образом строится график ускорения точки (рис. 4.15, в). В случае прямолинейного движения точки – это полное ускорение, иначе – тангенциальное. Масштаб ускорения для диаграммы:
µa = µV /µt · H2 = (µV /µf · H2) ώ12, мс–2/мм.
На рис. 4.15 показана диаграмма движения точки Е выходного звена: а) перемещение и путь: S = f (f);
б) скорость точки Е: V = f (t); в) ускорение точки Е: a = f (t).
86
Стр. 86 |
ЭБ ПНИПУ (elib.pstu.ru) |

Рис. 4.14. Планы положений кривошипно-кулисного механизма
87
Стр. 87 |
ЭБ ПНИПУ (elib.pstu.ru) |

Рис. 4.15. Диаграммы движения выходного звена:
a – график изменения перемещений и пути звена; б – график изменения скорости звена; в – график изменения ускорений звена
88
Стр. 88 |
ЭБ ПНИПУ (elib.pstu.ru) |

4.9. ПРИМЕРЫ РАСЧЁТА РЫЧАЖНЫХ МЕХАНИЗМОВ
ГРАФОАНАЛИТИЧЕСКИМ МЕТОДОМ КИНЕМАТИЧЕСКОГО
ИССЛЕДОВАНИЯ
4.9.1. Механизм шарнирного четырехзвенника ABCD
Структурная формула 1→21.
Исходные данные: ℓAD = ℓ0; ℓAB = ℓ1; ℓBC = ℓ2; ℓCD = ℓ3.
Схема механизма в данном положении представлена на рис. 4.16. Угловая скорость кривошипа может быть найдена по формуле
ωAB = π30nAB = ω1 = const .
Скорость точки В: VB = ω1 AAB . Вектор скорости VB перпендикулярен
звену АВ схемы и направлен в сторону вращения кривошипа АВ.
На чертеже выбираем произвольно точку р – полюс. Vp = 0. Из т. р проводим вектор рb, изображающий скорость точки В (рис. 4.16, а). Длина отрезка рb выбирается произвольно, но такой, чтобы масштаб плана скоростей µV =VB /( pb) = ω1 A1 /( pb), мс-1/мм, выражался простым
числом.
Затем для структурной группы 21 записываем векторные уравнения
скоростей. Скорости концевых элементов группы VB иVD = 0 известны:
Vc =V B +V CB ,
V =V +V ,
(4.83)
c D CD
где V CB – вектор относительной скорости точки С в ее движении относительно точки В; VCD – вектор относительной скорости точки С вокруг D.
Величины этих векторов неизвестны. По направлению V CB CB, VCD CD . Исходя из этого, согласно первому уравнению
системы (4.83), из т. b проводим луч соответственно ┴ звену CB схемы, а согласно второму уравнению (4.83) из т. p – луч ┴ СD. Пересечение лучей дает точку С – конец вектора V C . Т. С соединяем с полюсом p
(рис. 4.16, а).
V C = ( pc) µV ; VCB = (cb) µV ; VCD = (cd) µV =V C .
89
Стр. 89 |
ЭБ ПНИПУ (elib.pstu.ru) |

Рис. 4.16. Кинематическое исследование механизма шарнирного четырёхзвенника: а – схема механизма; б – план ускорений; в – план скоростей
Положение точки S, соответствующей точке S схемы, определяем на
плане скоростей из пропорции BC = ABC = bc по свойству подобия. Со-
BS ABS bs
единив S с полюсом p, получим величину и направления скорости точки
S: VS = ( ps) µV .
90
Стр. 90 |
ЭБ ПНИПУ (elib.pstu.ru) |