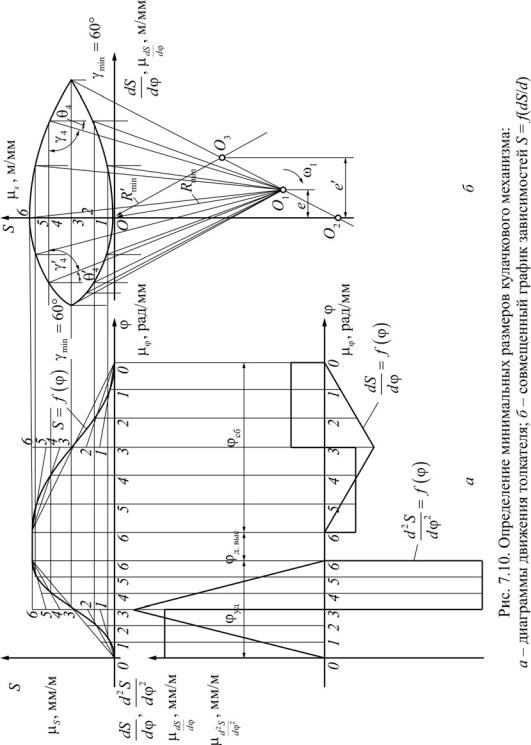
Соединив точку О1 с началом координат О совмещенного графика (см. рис. 7.10, б), получим отрезок О1О, изображающий минимальный радиус кулачка Rmin в масштабе перемещения µS. Расстояние от выбранного центра вращения кулачка до оси перемещения называется эксцентриситетом е (смещением).
Кулачковый механизм со смещением имеет меньший Rmin, чем центральный механизм. В этом нетрудно убедиться, если сравнить отрезки
О1О и О2О, изображающие Rmin в том и другом случае (см. рис. 7.10, б): О1О < О2О (отрезок О2О изображает Rmin для центрального кулачкового
механизма). Следовательно, габариты в целом кулачкового механизма со смещением в данном случае будут меньше.
Если кулачок одностороннего вращения, то движение толкателя на фазе сближения совершается под действием пружины или собственного веса. Для этого периода работы угол передачи не имеет решающего значения, как при подъеме, поэтому может быть допущен угол, значительно
меньший γmin.
В этом случае область, где можно расположить центр вращения кулачка, определяем следующим образом. Проводим касательную только к кривой S = f (dS dφ) на фазе сближения. Затем проводим луч под уг-
dφ) на фазе сближения. Затем проводим луч под уг-
лом γmin из начала координат на фазе удаления. Точка О3 пересечения касательной и луча определяет центр вращения кулачка одностороннего действия. На рис. 7.10, б расстояние ОО3 является R΄min. Следовательно, центр вращения кулачка можно выбрать в точке О3, что позволит уменьшить минимальный радиус, а следовательно, и габариты кулачкового механизма.
При этом необходимо выбирать точку О3 так, чтобы угол передачи был не менее γmin в пределах фазы удаления.
Некоторое уменьшение углов γ на фазе сближения при одностороннем вращении кулачка никак не отразится на работе кулачкового механизма.
Смещение e΄ толкателя в этом случае увеличилось. Следовательно, за счет соответствующего выбора смещения можно уменьшить размеры кулачковой шайбы.
7.5. ПОСТРОЕНИЕ ПРОФИЛЯ КУЛАЧКА
При построении профиля кулачка масштаб выбирают, принимая во внимание лишь свободное поле чертежа. Из произвольной точки О1 (рис. 7.11) проводят окружность радиусом е. К полученной окружности проводят касательную τ–τ, которая будет осью толкателя. Затем из точ-
219




 φ
φ

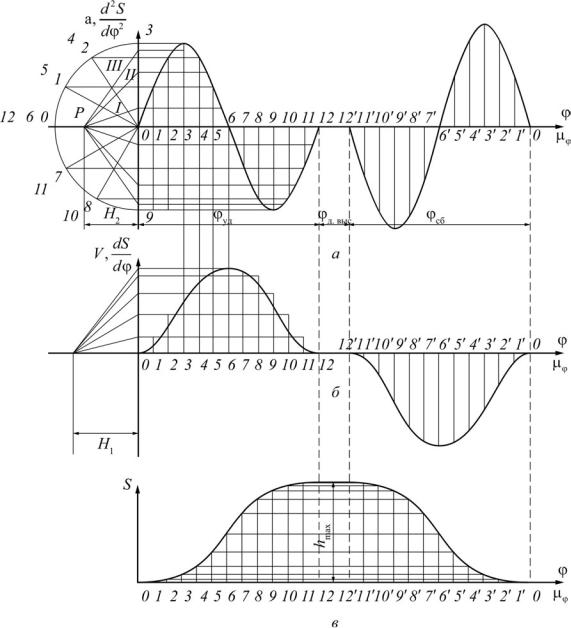
 dφ2 = f (φ) на фазе сбли-
dφ2 = f (φ) на фазе сбли- dφ2 = f (φ) на фазе сближения
dφ2 = f (φ) на фазе сближения