

Строительная механика стержневых систем. Часть 1
.pdfМинистерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Пермский национальный исследовательский политехнический университет»
С.Г. Кузнецова
СТРОИТЕЛЬНАЯ МЕХАНИКА СТЕРЖНЕВЫХ СИСТЕМ
В двух частях Часть 1
Утверждено Редакционно-издательским советом университета
в качестве учебного пособия
Издательство Пермского национального исследовательского
политехнического университета
2015
1
УДК 624.04 + 624.07 (075.8) ББК 38.112 я73
К89
Рецензенты: профессор, доктор технических наук
Г.Г. Кашеварова
(Пермский национальный исследовательский политехнический университет); профессор, доктор технических наук
П.П. Гайджуров
(Ростовский государственный строительный университет)
Кузнецова, С.Г.
К89 Строительная механика стержневых систем : учеб. пособие : в 2 ч. / С.Г. Кузнецова. – Пермь : Изд-во Перм. нац. исслед. политехн.
ун-та, 2015.
ISBN 978-5-398-01346-7 Ч. 1. 2015. – 143 с. ISBN 978-5-398-01347-4
Изложены основы расчета статически определимых стержневых систем на неподвижную и подвижную нагрузки и метод сил расчета статически неопределимых рам. Представлены примеры и задачи с ответами для самоконтроля.
Предназначено для студентов-бакалавров, обучающихся по направлению «Строительство».
УДК 624.04 + 624.07 (075.8) ББК 38.112 я73
ISBN 978-5-398-01347-4 (ч. 1) |
|
ISBN 978-5-398-01346-7 |
ПНИПУ, 2015 |
2
ОГЛАВЛЕНИЕ |
|
Введение............................................................................ |
6 |
Глава 1. Кинематический анализ сооружений......... |
7 |
1.1. Степень свободы балочных и шарнирно- |
|
стержневых систем................................................................... |
7 |
1.2. Правила соединения дисков в геометрически |
|
неизменяемую систему............................................................ |
9 |
1.3. Мгновенно изменяемые системы ............................ |
9 |
1.4. Примеры. Проверка системы |
|
на геометрическую неизменяемость..................................... |
11 |
1.5. Задачи для самоконтроля........................................ |
13 |
Глава 2. Статически определимые |
|
многопролетные балки........................................................ |
16 |
2.1. Основные понятия................................................... |
16 |
2.2. Поэтажная схема ..................................................... |
18 |
2.3. Расчет составных балок |
|
на неподвижную нагрузку..................................................... |
19 |
Глава 3. Линии влияния усилий |
|
и реакций опор...................................................................... |
22 |
3.1. Основные понятия................................................... |
22 |
3.2. Линии влияния опорных реакций.......................... |
22 |
3.3. Линии влияния поперечных сил............................ |
24 |
3.4. Линии влияния изгибающих моментов................. |
28 |
3.5. Определение усилий по линиям влияния.............. |
31 |
3.6. Частные случаи определения усилий |
|
по линиям влияния................................................................. |
34 |
3.7. Примеры определения усилий |
|
по линиям влияния................................................................. |
36 |
3.8. Линии влияния реакций опор и усилий |
|
составной статически определимой балки........................... |
38 |
3.9. Задачи для самоконтроля........................................ |
42 |
Глава 4. Расчет статически определимых |
|
плоских ферм......................................................................... |
43 |
4.1. Понятие фермы. Классификация ферм................. |
43 |
4.2. Проверка геометрической неизменяемости |
|
фермы ...................................................................................... |
44 |
3 |
|
4.3. Определение усилий в стержнях простейших |
|
ферм от неподвижной нагрузки............................................ |
45 |
4.3.1. Определение усилий в стержнях ферм |
|
способом моментной точки (способ Риттера) ..................... |
46 |
4.3.2. Определение усилий в стержнях фермы |
|
способом проекций................................................................. |
48 |
4.3.3. Частные случаи равновесия узлов.................... |
50 |
4.4. Примеры нахождения усилий |
|
в стержнях фермы................................................................... |
53 |
4.5. Линии влияния усилий в стержнях |
|
простейших ферм ................................................................... |
56 |
4.5.1. Построение линий влияния усилий |
|
в стержнях фермы способом моментной точки................... |
56 |
4.5.2. Построение линий влияния усилий |
|
в стержнях фермы способом проекций................................ |
61 |
4.6. Примеры построения линий влияния усилий |
|
в стержнях фермы .................................................................. |
64 |
Глава 5. Трехшарнирные системы........................... |
68 |
5.1. Понятие трехшарнирных систем........................... |
68 |
5.2. Расчет трехшарнирной арки (рамы) |
|
на вертикальную нагрузку..................................................... |
70 |
5.3. Расчет трехшарнирной арки (рамы) с затяжкой |
|
на вертикальную нагрузку..................................................... |
75 |
5.4. Пример расчета трехшарнирной арки................... |
78 |
5.5. Расчет трехшарнирной арки |
|
на горизонтальную нагрузку................................................. |
84 |
Глава 6. Определение перемещений |
|
в статически определимых системах от нагрузки, |
|
воздействия температуры и осадки опор......................... |
89 |
6.1. Определение перемещений от нагрузки............... |
89 |
6.2. Определение перемещений от воздействия |
|
температуры............................................................................ |
93 |
6.3. Определение перемещений от осадки опор.......... |
95 |
4
Глава 7. Статически неопределимые системы |
|
и расчет рам методом сил................................................... |
97 |
7.1. Основные понятия и свойства статически |
|
неопределимых систем .......................................................... |
97 |
7.2. Степень статической неопределимости |
|
и основная система метода сил............................................. |
97 |
7.3. Примеры определения степени |
|
статистической неопределимости и основной системы..... |
99 |
7.4. Канонические уравнения метода сил.................. |
101 |
7.5. Проверка коэффициентов и свободных |
|
членов канонических уравнений......................................... |
103 |
7.6. Построение окончательной эпюры моментов, |
|
эпюры поперечных сил и эпюры продольных сил............ |
104 |
7.6.1. Построение окончательной эпюры |
|
изгибающих моментов......................................................... |
104 |
7.6.2. Построение эпюры поперечных сил............... |
105 |
7.6.3. Построение эпюры продольных сил .............. |
108 |
7.6.4. Построение эпюр Q и N для |
|
наклонного элемента.................................................... |
109 |
7.7. Проверка правильности окончательной |
|
эпюры моментов, эпюры поперечных |
|
и продольных сил................................................................. |
111 |
7.7.1. Проверка эпюры изгибающих моментов....... |
111 |
7.7.2. Статическая проверка эпюр............................ |
112 |
7.8. Пример расчета статически неопределимой |
|
рамы методом сил................................................................. |
112 |
7.9. Расчет симметричных рам методом сил |
|
на симметричную и кососимметричную нагрузку............ |
128 |
7.10. Группировка неизвестных в методе сил ........... |
136 |
5
ВВЕДЕНИЕ
Строительная механика разрабатывает и изучает принципы и методы расчета сооружений на действие постоянной и временной нагрузок.
Под сооружением понимается совокупность неподвижно соединенных между собой дисков (элементов). Основные требования к сооружениям:
–неподвижность относительно основания, сохранение геометрической формы в течение всего срока службы;
–экономичность, т.е. наименьшие затраты на материалы и возведение сооружения;
–надежность, т.е. невозможность разрушения несущих конструкций.
Сложность учета влияния всех факторов и взаимодействия отдельных частей сооружения приводит к тому, что рассматривается не само сооружение, а его упрощенная схема, которая называется расчетной схемой.
При этом оговариваются такие факторы, как:
–форма и размеры;
–вид и способ приложения нагрузок, их величины;
–способы закрепления стержней;
–материал стержней.
Сооружения классифицируют по геометрическим параметрам (массивные сооружения, пластинки и оболочки, стержневые) и по назначению (промышленные, гражданские, транспортные, гидротехнические, уникальные).
В настоящем пособии рассматриваются только плоские стержневые системы.
6

ГЛАВА 1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ СООРУЖЕНИЙ
1.1. Степень свободы балочных и шарнирностержневых систем
Сооружение должно быть геометрически неизменяемым и неподвижным относительно основания. Геометрически неизменяемой называется система, перемещение частей которой невозможно без деформации элементов. Простейшей геометрически неизменяемой системой является шарнирный треугольник (рис. 1.1).
Рис. 1.1
Геометрически изменяемой называется система, перемещение частей которой возможно без деформации элементов. Простейшей геометрически изменяемой системой является шарнирный четырехугольник (рис. 1.2). Например, в шарнирном прямоугольнике узлы 1 и 2 могут занять положение 1ʹ и 2ʹ, и при этом деформации элементов не происходит.
Рис. 1.2
7

Для определения, является ли сооружение геометрически неизменяемым, используется кинематический анализ, который должен предшествовать расчету.
Геометрически неизменяемый элемент сооружения, называемый диском, имеет в плоскости три степени свободы, т.е. он может перемещаться поступательно по вертикали, по горизонтали и поворачиваться вокруг любой точки. Стержень является диском. Диски соединяют шарнирами и опорными стержнями. Шарниры и опорные стержни называют кинематическими связями. Шарнир – это цилиндрический валик, трением которого пренебрегают.
Закрепим плоский диск к неподвижному диску (рис. 1.3) шарниром (неподвижный диск заштрихован).
Рис. 1.3 |
Рис. 1.4 |
При этом свободный диск теряет две степени свободы, т.е. не может перемещаться по вертикали и горизонтали, но может поворачиваться. Значит, шарнир эквивалентен двум связям. Теперь закрепим свободный диск к неподвижному диску одним опорным стержнем, например, горизонтальным (рис. 1.4). Свободный диск не может перемещаться по направлению опорного стержня, но может перемещаться по вертикали (в данном случае) и может поворачиваться. Следовательно, опорный стержень (кинематическая связь) уменьшает степень свободы на единицу. Обозначим число степеней свободы как W.
Для балочных и шарнирно-стержневых систем
W 3Д 2Ш Соп,
где Д – число дисков; Ш – число простых шарниров;
Соп – число опорных стержней.
8
Для шарнирных систем
W = 2y – С,
где y – число узлов, в том числе опорных;
С– число стержней, в том числе опорных.
При W 0 система геометрически изменяемая, т.е. представляет собой механизм.
При W 0 система может быть геометрически неизменяемой.
При W 0 система может быть геометрически неизменяемой.
Чтобы разобраться в геометрической неизменяемости конструкции, недостаточно определить число степеней свободы (степень подвижности). При W 0 или W 0 необходимо проверить, правильнолирасставленысвязи иправильно лисоединены диски.
1.2. Правила соединения дисков в геометрически неизменяемую систему
Существуют следующие правила соединения дисков:
1.Два диска образуют геометрически неизменяемую систему, если соединены тремя стержнями (кинематическими связями), не пересекающимися в одной точке и не параллельными друг другу.
2.Две пересекающиеся связи заменим шарниром. Два диска образуют геометрически неизменяемую систему, если соединены шарниром и связью, не проходящей через этот шарнир.
3.Три диска образуют геометрически неизменяемую систему, если соединены шестью стержнями, попарно пересекающимися в точках, не лежащих на одной прямой.
4.Три диска образуют геометрически неизменяемую систему, если соединены тремя шарнирами, образующими шарнирный треугольник.
1.3. Мгновенно изменяемые системы
Мгновенно изменяемые системы (рис. 1.5) теоретически имеют бесконечно малую подвижность, но фактически их пере-
9
мещения и реакции опор, вызываемые нагрузкой, оказываются настолько резко увеличенными, что применение их в качестве строительных сооружений недопустимо.
Рис. 1.5
При действии произвольной нагрузки реакция стержня BC (левый рисунок) будет возрастать по мере приближения направления BC к направлению AC и обратится в бесконечность, когда эти два направления сольются, а система станет мгновенно изменяемой (правый рисунок).
Таким образом, при образовании геометрически неизменяемой системы следует присоединять узлы при помощи стержней, не лежащих на одной прямой.
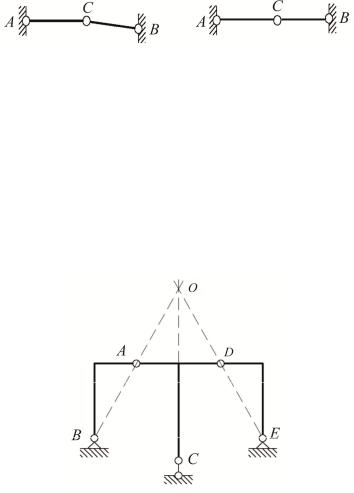
В системе на рис. 1.6 три опорных стержня пересекаются в точке О.
Рис. 1.6
Система при W = 3 3 2 2 5 = 0 обладает мгновенной подвижностью, поскольку допускает небольшой поворот относительно т. О, которая называется мгновенным центром. Наклонными опорными стержнями являются АВ и DE.
10