

Строительная механика стержневых систем. Часть 1
.pdfПостроим л. в. RD (см. рис. 3.17, б). Груз P = 1 на консоли с опорой D. Линию влияния RD см. на рис. 3.9. Далее груз P = 1 на балке Ш2Ш3 , давление на консоль с опорой D передается через шарнир (опору) Ш3. Если груз P = 1 на опоре Ш3 , это равносильно тому, что груз P = 1 на конце консоли с опорой D. В этом случае RD = 1. Груз P = 1 на опоре Ш2 , тогда Rш3 = 0 , и следова-
тельно, RD = 0. Отложим нулевую ординату под грузом, т.е. на вертикали шарнира Ш2 . Соединяем точку с ординатой +1 и нулевую точку, соответствующую шарниру Ш2 . Когда груз P = 1 в пределах балок АШ1 и ВС, давление на консоль с опорой D не
передается.
Рассмотрим построение линий влияния поперечных сил и изгибающих моментов в сечениях K1 , K2 , K3 .
Построим л. в. QKправ1 (см. рис. 3.17, в). Сечение K1 считаем
отстоящим на бесконечно малую величину вправо от опоры B. Груз P = 1 перемещаем по балке BC и ее консолям, строим л. в.
QKправ1 в пределах этой балки (см. рис 3.5, б).
Груз на балке АШ1 и ее консоли. С этой балки давление на левую консоль балки BC передается. Если груз P = 1 на опоре Ш1, то это равносильно тому, что P = 1 на конце консоли балки
BC. В этом случае QKправ1 = cl . Если груз P = 1 на опоре А, реакция
RШ1 балки АШ1 равна 0. Тогда и QKправ1 = 0. Под грузом от оси откладываем ординату, равную 0. Соединяем две точки (с ординатой cl и 0) прямой и продолжаем ее на левую консоль балки
АШ1 .
Перемещаем груз P = 1 по балке Ш2Ш3. Давление с этой балки на правую консоль балки BC передается через шарнир
41

Ш |
|
. Если груз P = 1 на опоре Ш |
|
балки Ш |
Ш |
|
, то Qправ = – d |
, |
|||||
|
2 |
|
|
|
|
|
2 |
2 |
|
3 |
K1 |
l |
|
а если на опоре |
Ш |
, |
то Qправ |
= 0. Соединяем две точки (с орди- |
|||||||||
|
|
|
3 |
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
натами – dl и 0).
Груз P = 1 на консоли с опорой D. С этой балки давление на балку Ш2Ш3 не передается, следовательно, не передается и на бал-
куBC. Значит, л. в. Qправ впределахконсолисопоройD нулевая. |
|||||||||
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
Л. в. |
МK |
QK |
2 |
МK |
2 |
QK |
3 |
и МK |
(см. рис. 3.17) строятся |
|
1 |
|
|
|
|
3 |
|||
аналогично.
3.9. Задачи для самоконтроля
Задача 3.4. Проверить балку на геометрическую неизменяемость (размеры указаны в метрах):
Задача 3.5. Найти RА, QK , |
МK , |
QK |
, |
МK |
балки на ри- |
1 |
1 |
|
2 |
|
2 |
сунке задачи 3.4 по линиям влияния, предварительно построив поэтажную схему.
Ответы:
Задача 3.4: балка геометрически неизменяемая.
Задача |
3.5: |
RА = 3,083 кН, |
QK = 0,083 кН, |
||
|
|
|
|
1 |
|
Млев = 11,75 кН м, |
|
Мправ = – 0,25 кН м, |
Qлев = 2,83 кН, |
||
K |
|
|
K |
K |
2 |
1 |
|
|
1 |
|
|
Qправ = –2,17 кН, |
М |
K2 |
= 6,5 кН м. |
|
|
K2 |
|
|
|
|
|
|
|
|
42 |
|
|

ГЛАВА 4. РАСЧЕТ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ ПЛОСКИХ ФЕРМ
4.1. Понятие фермы. Классификация ферм
Фермой называется стержневая система, в расчетной схеме которой жесткие узлы заменены шарнирами. Ферма используется в качестве перекрытий, в мостовых конструкциях.
Элементы фермы, расположенные по контуру, образуют пояса. Различают верхний пояс и нижний пояс. Стержни фермы называют по обозначению узлов (рис. 4.1).
Рис. 4.1
Стержни верхнего пояса: 2–4, 4–6, 6–8, 8–10, 10–12, 12–14. Стержни нижнего пояса: 1–3, 3–5, 5–7, 7–9, 9–11, 11–13.
Стержни, соединяющие пояса, образуют решетку:
–вертикальные стержни – стойки: 1–2, 3–4, 5–6, 7–8, 9–10, 11–12, 13–14;
–наклонные стержни – раскосы: 2–3, 4–5, 6–7, 8–9, 10–11,
12–13.
Вферме нагрузка передается через узлы (в дальнейшем рассматриваем только узловую нагрузку) и все стержни работают только на продольные усилия (растяжение или сжатие). Рас-
тяжение принимаем со знаком «+», сжатие со знаком « ». Расстояние между соседними узлами по горизонтали
называют панелью и обозначают d (см. рис. 4.1). Фермы классифицируют:
43

1)по очертанию поясов (с параллельными поясами, трапециевидные, треугольные, с ломаным, круговым или параболическим поясами);
2)очертанию решетки (с треугольной решеткой, с ромбической решеткой, раскосные, полураскосные, многораскосные);
3)назначению (стропильные, мостовые, башенные);
4)опиранию (балочные, консольно-балочные, консоль-
ные).
4.2. Проверка геометрической неизменяемости фермы
Число степеней свободы плоской фермы определяем по формуле
W = 2y – (Cф + Cоп ),
где y – число узлов, в том числе опорных; Cф – число стержней фермы;
Cоп – число опорных стержней.
Проверка геометрической неизменяемости выполняется по правилам присоединения узлов или дисков к геометрически неизменяемому диску (первоначально – к шарнирному треугольнику). Рассмотрим, например, ферму на рис. 4.2.
Рис. 4.2
Определяем степень подвижности (число степеней свободы): W 2 14 – (25 3) 0 – это необходимое условие.
Используем правила геометрической неизменяемости. Шарнирный треугольник 5–7–8 геометрически неизменяемый.
44
К нему присоединяем узел 6 при помощи стержней 5–6 и 6–8, не лежащих на одной прямой. Следовательно, образовавшаяся система геометрически неизменяемая (см. гл. 1). Иначе к шарнирному треугольнику 5–7–8, который можно рассматривать как диск, присоединяем два диска (стержня) 5–6
и6–8. Три диска соединены тремя шарнирами 5, 6 и 8, не лежащими на одной прямой (правило 4, см. гл. 1). Принимаем теперь эту систему за один диск. К нему присоединяем узел 3 стержнями 3–8 и 3–5, не лежащими на одной прямой (можно использовать правило соединения трех дисков). Получаем геометрически неизменяемую систему, к которой присоединяем узел 4 стержнями 3–4 и 4–6. Затем присоединяем узел 1 стержнями 1–8 и 1–3, не лежащими на одной прямой. Дальше присоединяем узел 2 стержнями 2–1 и 2–4.
Рассуждая аналогично, присоединяем узлы 9, 10, 11, 12, 13
и14. Заданная ферма геометрически неизменяемая и прикреплена к массиву при помощи трех опорных стержней, не пересекающихся в одной точке и не параллельных друг другу. Значит, сооружение геометрически неизменяемое.
4.3. Определение усилий в стержнях простейших ферм от неподвижной нагрузки
Для определения усилий в стержнях простейших ферм от неподвижной нагрузки в первую очередь находят реакции опор фермы, так же как и в балках (простых, консольных).
Затем ферму рассекают сечением на две части и рассматривают равновесие одной из частей, приняв усилия в рассеченных стержнях растягивающими (положительными), т.е. направленными от узла. Усилия в стержнях верхнего пояса будем обозначать буквой О, например усилие в стержне 2–4 (см. рис. 4.1 и
4.2) – О2–4 . В остальных стержнях верхнего пояса – О4–6 , О6–8 ,
О8–10 , О10–12 , О12–14 . Усилия в стержнях нижнего пояса обозначаем как U. Тогда имеем усилия U1–3 , U3–5 , U5–7 , U7–9 , U9–11 ,
U11–13.
45

Усилия в стойках обозначим как V, в раскосах – D. Соответственно усилия в этих стержнях: V1–2 , V3–4 , V5–6 , V7–8 , V9–10 ,
V11–12 , |
V13–14 (см. рис. |
4.1 и 4.2), D2–3 , D4–5 , D6–7 , D8–9 , D10–11 , |
D12–13 |
(см. рис. 4.1) и |
D1–8 , D3–8 , D5–8 , D8–9 , D8–11 , D8–13 (см. |
рис. 4.2). |
|
|
Статика фермы позволяет составить уравнение равновесия |
||
так, чтобы в него входило одно неизвестное интересующее нас усилие. Отсюда два способа определения усилий:
1)способ моментной точки,
2)способ проекций.
Способ проекций применяется в двух вариантах. Первый вариант способа проекций – когда все усилия, образовавшиеся сечением, кроме рассматриваемого, параллельны. Второй вариант способа проекций применяется, когда рассматривается равновесие узла.
4.3.1. Определение усилий в стержнях ферм способом моментной точки (способ Риттера)
Рассмотрим ферму на рис. 4.3.
Рис. 4.3
Нагрузка в пролете симметричная, следовательно, вертикальные реакции опор равны, т.е. RA = RB = 2P = 2P.
46
Найдем усилия в стержнях 4–6 и 3–6, т.е. О4–6 и D3–6 .
Проведем сечение I–I. Усилия в рассеченных стержнях принимаем растягивающими.
Рассмотрим равновесие левой части фермы, образованной сечением I–I. Для определения усилия О4–6 рационально взять
M относительно точки 3, так как два не интересующих нас
усилия, образовавшихся сечением I–I, пересекаются в т. 3 и, следовательно, относительно этой точки момента не образуют.
Точка 3 для усилия О4–6 называется моментной (точкой Риттера). Итак, M3левI–I = 0. Это краткая форма уравнения равнове-
сия. |
Тогда |
P |
развернутая |
форма |
уравнения |
будет |
||||
О r |
+ R |
|
d |
d = 0, |
где r – плечо усилия О |
относительно |
||||
A |
|
|||||||||
4–6 1 |
|
|
2 |
|
1 |
|
4–6 |
|
|
|
|
|
|
|
|
|
= 1,5d . Знак « – » указывает на |
||||
т. 3 (см. рис. 4.3). Отсюда О |
||||||||||
|
|
|
|
|
|
4–6 |
r1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
то, что стержень 4–6 работает на сжатие.
Определим усилие D3–6 . Два не интересующих нас усилия О4–6 и U3–5 пересекаются в точке O. Точка О – моментная для
усилия |
D3–6 . Рассмотрим равновесие |
левой |
части как |
||||||||
M левI–I = 0 , т.е. |
D |
r |
+ R |
a P(a + d) |
P |
a = 0. Отсюда |
|||||
|
|||||||||||
|
о |
|
3–6 2 |
A |
|
2 |
|
|
|||
|
|
Pd 0,5 Pa , |
|
|
|
|
|
|
|||
D |
= |
где |
r |
– плечо усилия |
D |
относительно |
|||||
3–6 |
|
r2 |
|
2 |
|
|
|
|
3–6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т. О (см. рис. 4.3). |
|
|
|
|
|
|
|
|
|
||
|
Если рассмотреть равновесие правой части, образованной |
||||||||||
сечением I–I, то получим MоправI–I = 0 , т.е. |
|
|
|
|
|
||||||
D r |
+ R (a + 4d) P(a + 2d) P(a + 3d) |
P |
(a + 4d) = 0. |
||||||||
|
|||||||||||
3–6 2 |
B |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда D3 6 = Pd 0,5 Pa . r2
Величины а, r1 и r2 находим с использованием геометрии фермы (см. рис. 4.3):
47

r1 |
= SO-3 |
sin = SO-3 |
|
S1 2 |
, |
|
S 2 |
+ a2 |
|||||
|
|
|
|
1 2 |
|
|
r2 = SO-3 sin = SO-3 |
|
h2 |
, |
h2 |
+ S 2 |
||
2 |
3 5 |
|
|
где S – длина отрезка.
Простейшая форма способа моментной точки – когда в сечение попадает не более трех стержней фермы.
Примечание: далее в узлах ферм шарниры не изображены, но они подразумеваются и в расчетах учтены.
4.3.2. Определение усилий в стержнях фермы способом проекций
Обратимся к 1-му варианту использования способа проекций. Рассмотрим ферму на рис. 4.4.
Рис. 4.4
Найдем усилие V5–6 . Реакции опор RA RB 3P. Рассечем
ферму сечением I–I на две части так, чтобы в сечение обязательно попал стержень 5–6, при этом количество стержней должно быть наименьшим. Два не интересующих нас стержня 6–8 и 3–5 параллельны. Составим уравнение равновесия сил ле-
вой части фермы: Y левI–I = 0, т.е.
48

V5–6 + P + P P2 RA = 0, отсюда V5–6 = 0,5P . Усилия О6–8 и
U3–5 проекции на вертикальную ось Y не дадут.
Найдем усилие D8–9 . Используем сечение II–II. Рассмотрим равновесие правой части фермы Y правII–II = 0,
D8–9 cos + RB P P P2 = 0, отсюда D8–9 = 0,5cosP .
Рассмотрим 2-й вариант способа проекций (способ выреза-
ния узлов). Дана ферма (рис. 4.5):
Рис. 4.5
Реакции опор RA RB 2P.
Для определения усилия O1–2 и U1–3 вырезаем узел 1. При
этом ферма разбивается также на две части. Левая часть – узел 1 (рис. 4.6).
Рис. 4.6
49
Составляем уравнения равновесия всех сил узла 1 так, чтобы в уравнение входило только одно неизвестное интересующее нас усилие. Тогда для определения O1–2 берем проекцию всех
сил узла 1 на ось, перпендикулярную U1–3 (ось y), а для определения U1–3 проектируем все силы на ось перпендикулярную
усилию O1–2 , т.е. ось z. у = 0 ; О1– 2 sin + RA P2 = 0 .
Отсюда О1–2 = 1,5 P . sin
z = 0, U1–3 sin + ( P2 RA )cos = 0.
Отсюда U1–3 = 1,5 P cos = 1,5 P ctg . sin
Простейшая форма равновесия узла – случай, когда в узле сходится не более двух стержней.
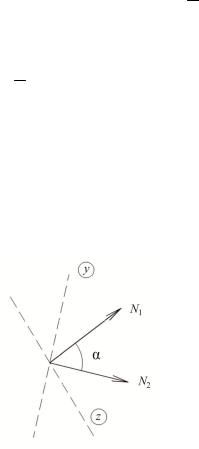
4.3.3.Частные случаи равновесия узлов
1.В двухстержневом узле без нагрузки усилия в стержнях равны нулю (рис. 4.7).
|
|
|
Рис. 4.7 |
у = 0, |
N1 |
sin = 0, |
ось y N2 , |
z = 0, |
N2 |
sin = 0, |
ось z N1. |
|
|
|
50 |